


In den vorherigen Berichten hast du bereits erfahren, wie der ESP32-CAM über einen USB-Seriell-Adapter am PC angeschlossen und das Beispielprogramm CameraWebServer aufgespielt wird. Danach ging es um den Bau und die Verkabelung des Roboter Autos. Jetzt sollte technisch alles funktionieren – und daher geht es in diesem Beitrag darum, die Motoren zu steuern und Text auf einem OLED-Display auszugeben. Damit dein Projekt vollständig wird, lernst du hier, wie man ESP32-CAM OLED Anzeige und Motorsteuerung realisiert.
Benötigte Bibliotheken in der Arduino IDE
Damit die Steuerung funktioniert, müssen zwei zusätzliche Bibliotheken in der Arduino IDE installiert werden: eine für den Servo-Kontroller (PCA9685) und eine für das OLED-Display (SSD1306).
1. PCA9685 Servo-Kontroller Bibliothek installieren
Installiere die Bibliothek Adafruit PWM Servo. Öffne dazu den Bibliotheksverwalter in der Arduino IDE und suche nach genau diesem Namen.
Hinweis: Wie du Bibliotheken installierst, erfährst du im Detail im Artikel Arduino Entwicklungsumgebung einrichten.
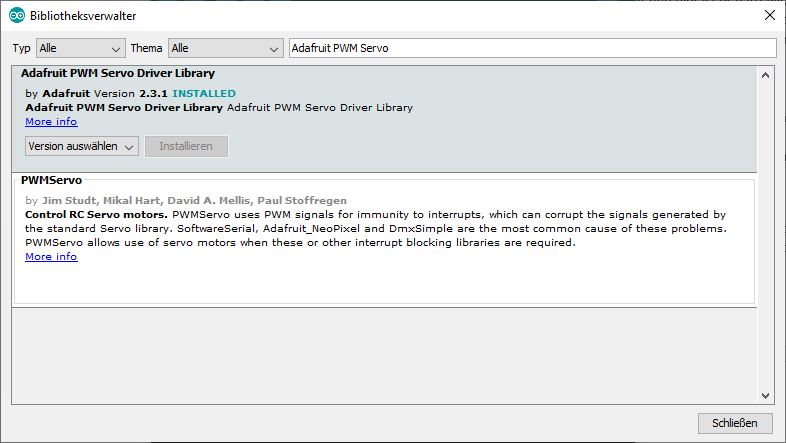
Arduino IDE Bibliothek Adafruit PWM Servo
2. OLED Display Bibliothek installieren
Suche im Bibliotheksverwalter nach ESP32 OLED und installiere die passende Bibliothek. Damit kannst du Texte auf dem kleinen Display ausgeben.
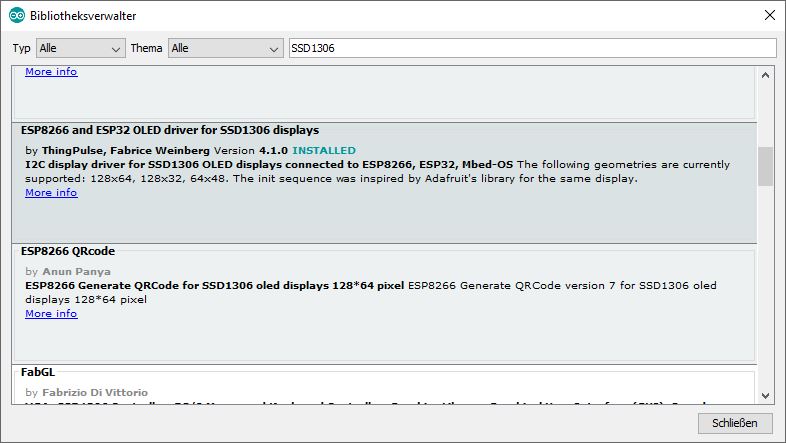
ESP8266 NodeMCU OLED Display SSD1306
Jetzt bist du bereit, beide Komponenten – das Display und den Servo-Kontroller – anzusprechen.
IP-Adresse auf dem OLED Display anzeigen
Die IP-Adresse des ESP32-CAM-Moduls auf dem OLED-Display anzuzeigen ist sehr hilfreich, um den Live-Stream schneller im Browser zu öffnen. Die Funktion drawIP(String MyIP) wurde in das bestehende Beispielprogramm CameraWebServer integriert und gibt die aktuelle IP-Adresse aus, sobald eine WLAN-Verbindung besteht.
Download: CameraWebServer OLED
Hinweis: Wird keine Verbindung zum WLAN aufgebaut, erscheint keine IP-Adresse auf dem Display. Als Erweiterung kann zum Beispiel “No WIFI found” angezeigt werden.
Motorsteuerung über Servo Kontroller
Die Motoren des Roboter Autos werden über den PCA9685 Servo-Kontroller gesteuert. Ein kleines Beispielprogramm zeigt, wie das funktioniert. Es basiert auf dem zuvor erwähnten OLED-Projekt und aktiviert die Motoren beim Start.
Weitere Infos zur Ansteuerung findest du im Artikel Servo Motor Steuerung.
Download: CameraWebServer robo
Nach dem Hochladen auf den ESP32-CAM und einem Reset sollte sich das Roboter Auto jetzt in Bewegung setzen.
Zusammenfassung
Mit der Kombination aus ESP32-CAM OLED Anzeige und Motorsteuerung ist dein Roboter Auto nun voll funktionsfähig. Aktuell fährt es noch geradeaus – die Steuerung per Webinterface folgt im nächsten Beitrag. Dort wird das HTML-Interface des CameraWebServer weiter angepasst oder bei Bedarf ein neues Interface entwickelt.
Artikel Übersicht ESP32-CAM Roboter Auto:
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Projekt StartESP32-CAM Roboter Auto mit live Video Stream selber bauen - Entwicklungsumgebung einrichten
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - USB-Serial Adapter Verkabelung
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Live Video Streaming Software aufspielen
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Baue Dein Chassis
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Verkabelung allgemein
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Verkabelung des I²C Hubs
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Roboter Auto Beispielprogramme
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – WIFI Fernsteuerung programmieren
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – externe WIFI antenne anschließen
Meine persönliche Buchempfehlung:
Für alle die noch mehr Vorhaben mit ihrem Arduino oder Arduino Klonen wie dem ESP-32 Cam Modul kann ich das Buch "Arduino: Das umfassende Handbuch" von Dr. Claus Kühnel empfehlen. Es erklärt sehr viel im Bereich der Elektronik mit wirklich gutem Hintergrundwissen und vielen Details zu Sensoren, LEDs, Displays etc. die einem davor schützen unzählige Fehler zu machen. So spart man sich viel Frust, Zeit und Geld für neue Bauteile. Daher ist dieses Buch das ideale Nachschlagewerk für Einsteiger sowie erfahrene Bastler die gerne in einem Buch nachschlagen und auf Qualität setzen.












Recent Comments