


Mit diesem Beitrag beginnt eine Artikelserie, die den Bau eines kleinen Roboter Autos mit ESP32-CAM und live Videobildübertragung Schritt für Schritt beschreibt. Mich begeistert das Thema Robotik und besonders mobile Roboter. Ziel ist es, das ESP32-CAM Roboter Auto so günstig wie möglich umzusetzen, damit möglichst viele Leserinnen und Leser ein eigenes Modell bauen können. Die Basis bildet das ESP32-CAM Modul – ein kleiner Mikrocontroller mit integrierter Kamera, WLAN- und Bluetooth-Funktionalität, der schon für rund 5 € erhältlich ist.
Dank der integrierten Kamera lässt sich das Videobild live über WLAN z. B. auf ein Smartphone oder Laptop übertragen. Das macht das Projekt besonders interessant – vor allem für Schulen, Workshops oder private Tüftler.
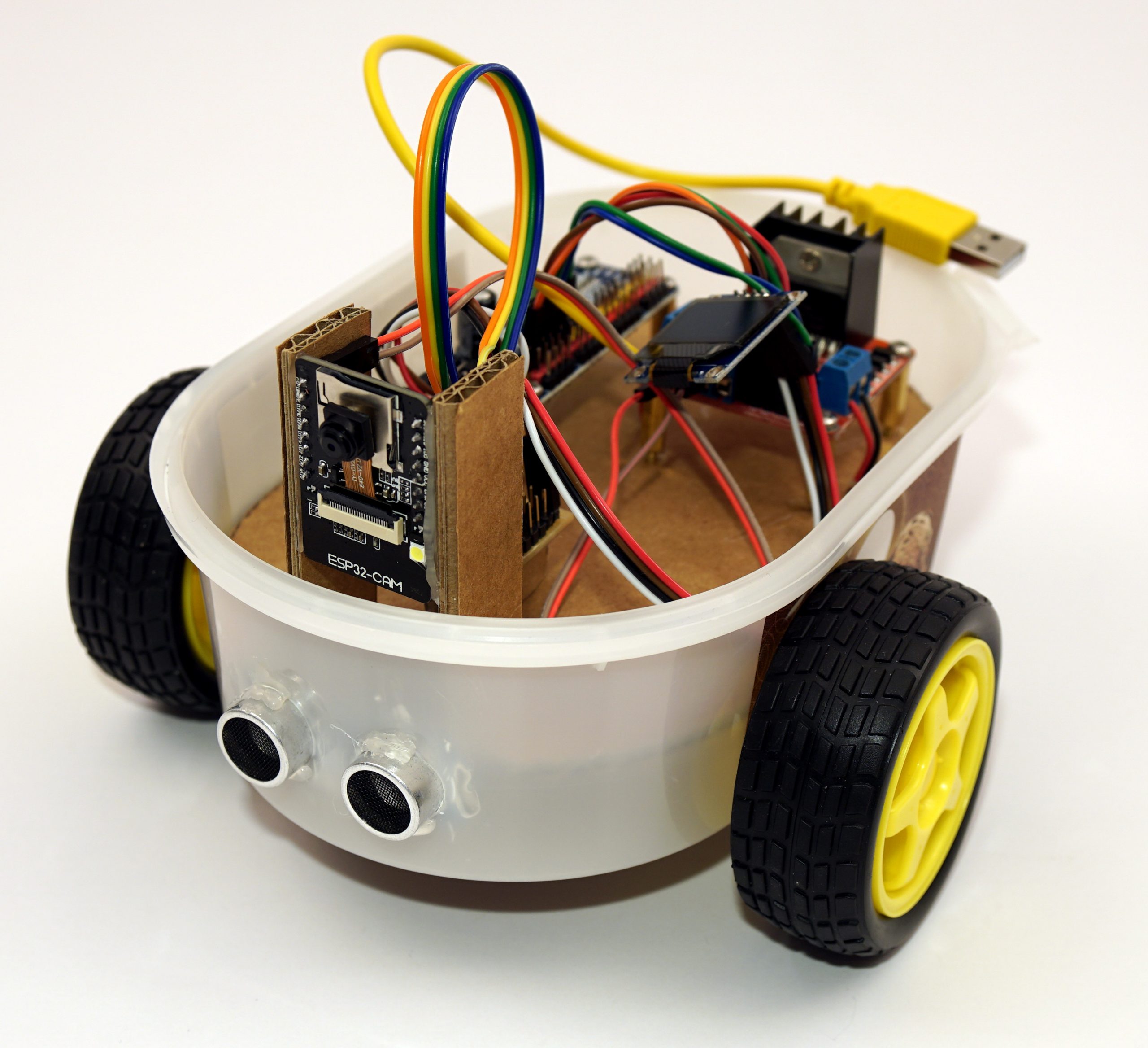
ESP32-CAM chassis ready
Notwendige Komponenten für das ESP32-CAM Roboter Auto
Ich habe gezielt günstige Bauteile gewählt, damit dieses Projekt mit einem Budget von ca. 15 € (bei Direktbestellung aus China) realisiert werden kann. Alternativ lassen sich die Komponenten auch bei Amazon bestellen – dann allerdings etwas teurer.
Hinweis: Die Stromversorgung erfolgt entweder über Mignon-Batterien oder über eine Power Bank. Für den günstigen Einstieg empfehle ich zunächst Batterien.
ESP32-CAM mit FT232RL USB-Adapter
Das ESP32-CAM Modul wird für die Programmierung über einen USB-zu-TTL-Adapter (FT232RL) mit dem PC verbunden.

L298N Motor Treiber mit H-Brücke
Bewährter Motor-Treiber mit integrierten Status-LEDs – ideal für Einsteiger.

Getriebemotoren
Zwei dieser gelben DC-Motoren reichen für das Grundmodell vollkommen aus.

Servo Kontroller mit PCA9685
Ermöglicht die Ansteuerung mehrerer PWM-Kanäle. Ideal zum Steuern der Motoren über I2C.

Stromversorgung ohne Power Bank
Falls keine Power Bank verwendet wird, brauchst du folgende Komponenten:
Step-Down Konverter mit USB-Ausgang:

Batteriehalter für 6x AA Mignon-Zellen:

Kabel & Zubehör
- Jumper-Kabel (Female-Female)
- Abgeschnittenes USB-Kabel (z. B. von alter Maus oder Tastatur)
- Optional: Schrumpfschlauch, Lötkolben, kleiner Kreuzschraubenzieher
Tipp: Alte USB-Kabel findest du günstig auf dem Wertstoffhof oder im Elektroschrott-Container.
Zusammenfassung
Mit dieser Artikelserie entsteht ein kleiner Roboter, der ferngesteuert wird und ein Live-Videobild überträgt. Wer die Grundlagen dieses Projekts versteht, kann zahlreiche eigene Ideen umsetzen – z. B. ein Überwachungssystem für den Hühnerstall oder smarte Sensorlösungen im Garten. Die Serie richtet sich an Neugierige jeden Alters – ob in der Schule, im Verein oder zu Hause.
Im nächsten Beitrag wird die Arduino IDE für ESP32-CAM eingerichtet, sodass du mit dem Programmieren starten kannst.
Artikel Übersicht ESP32-CAM Roboter Auto:
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Projekt StartESP32-CAM Roboter Auto mit live Video Stream selber bauen - Entwicklungsumgebung einrichten
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - USB-Serial Adapter Verkabelung
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Live Video Streaming Software aufspielen
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Baue Dein Chassis
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Verkabelung allgemein
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Verkabelung des I²C Hubs
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Roboter Auto Beispielprogramme
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – WIFI Fernsteuerung programmieren
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – externe WIFI antenne anschließen
Meine persönliche Buchempfehlung:
Für alle die noch mehr Vorhaben mit ihrem Arduino oder Arduino Klonen wie dem ESP-32 Cam Modul kann ich das Buch "Arduino: Das umfassende Handbuch" von Dr. Claus Kühnel empfehlen. Es erklärt sehr viel im Bereich der Elektronik mit wirklich gutem Hintergrundwissen und vielen Details zu Sensoren, LEDs, Displays etc. die einem davor schützen unzählige Fehler zu machen. So spart man sich viel Frust, Zeit und Geld für neue Bauteile. Daher ist dieses Buch das ideale Nachschlagewerk für Einsteiger sowie erfahrene Bastler die gerne in einem Buch nachschlagen und auf Qualität setzen.












Recent Comments