


Die Anleitung beschreibt wie ein Schrittmotor mit einem Rapsberry Pi angesteuert werden kann. Die Idee die ich habe ist einen Raspberry Pi Roboter zu bauen mit vier Schrittmotoren. Ich habe mir dafür einen 28BYJ-48 Schrittmotor gekauft der mit einen ULN2003A Chip angesteuert werden kann. Der Schrittmotor wurde zusammen mit dem Kontroller Board mit dem ULN2003A Chip verkauft. Das erleichtert es den Schrittmotor mit dem Raspberry Pi zu verbinden. Es ist nicht möglich den Schrittmotor direkt mit dem Raspberry Pi zu verbinden. Dafür reicht die Leistung der GPIO Ausgänge des Raspberry Pi nicht aus. Die liefern nur ein paar mAh.
Das folgende Bild zeigt den Schrittmotor und den Kontroller.

Stepper motor 28BYJ-48
Komponenten Liste
Raspberry Pi 3 Model B Kit
Für den Beginner ist das hier angebotene Kit gar nicht schlecht da es alle notwendigen Komponenten enthält.

Schrittmotor Kit 28BYJ-48
Ich finde dieses Angebot hier auf Amazon mit fünf Schrittmotoren gar nicht schlecht für den Bau eines Roboters.
Schrittmotor Verkabelung
Als erstes musst Du den Schrittmotor mit dem Kontroller verbinden. Ich habe hierfür das mitgelieferte weiße Kabel verwendet. Dann habe ich den Motorkontroller mit dem Raspberry Pi verbunden. Ich nenne diese Verbindung die logische Verbindung. Denn über die vier dafür benötigten Kabel teilt der Raspberry Pi dem Kontroller mit wie er den Schrittmotor anzusteuern hat. Du benötigst vier Female-to-Female Kabel für die logische Verbindung. Die Tabelle zeigt die Pins des Motor Kontrollers und die GPIO Pins des Raspberry Pi.
| Schrittmotor Kontroller | Raspberry Pi GPIO |
| IN1 | 6 |
| IN2 | 13 |
| IN3 | 19 |
| IN4 | 26 |
Der Schrittmotor Kontroller hat zwei zusätzliche Anschlüsse für GND und Vcc. Ich habe ein extra 5V Netzteil verwendet und dieses mit den beiden Anschlüssen GND / Vcc des Motortreibers verbunden. Jetzt ist alles soweit, dass Du Dein Setup mit dem nachfolgenden Python Programm testen kannst.
Python Testprogramm
Das Python Testprogramm bildet einen Decision Maker ab. Es wird die Drehrichtung des Schrittmotors zufällig bestimmen. Auch werden die Schritte, also wie lange sich der Schrittmotor drehen soll zufällig bestimmt pro Start des Programmes.
Das Programm steht auf GitHub zur Verfügung: Stepper-motor-28BYJ-48-Raspberry-Pi
Das Ergebnis ist ein kleiner netter Decision Maker wie das Bild im folgenden Abschnitt zeigt..
Decision Maker
Der Decision Maker war einfach gemacht. Ich habe einen Kreis gemalt mit acht Entscheidungen und habe alles aus einem Papier ausgeschnitten. Dieses habe ich einfach auf den Schrittmotor gelegt. Das Bild zeigt den Decision Maker.
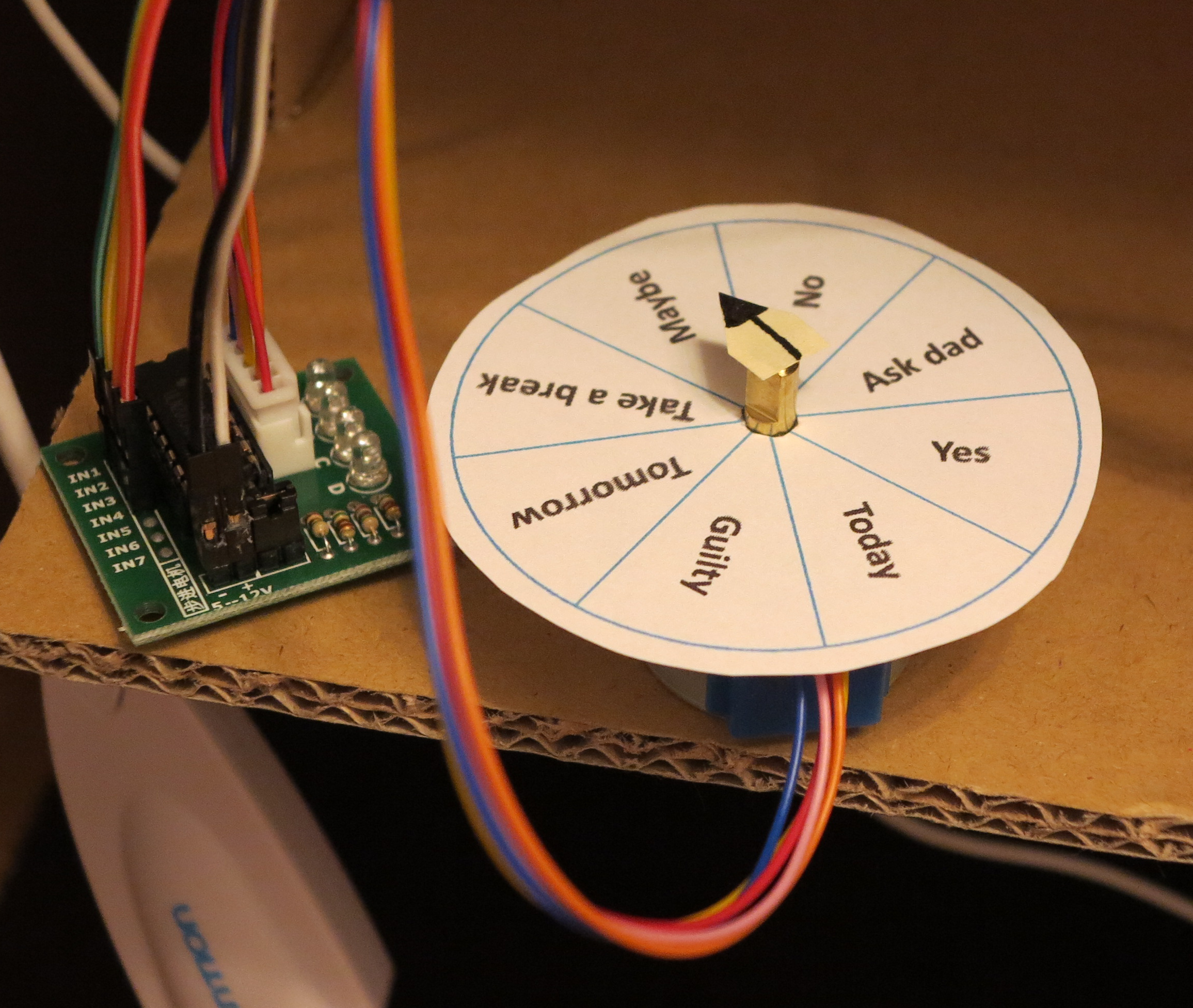
decision maker
Zusammenfassung
Dieser Art von Schrittmotoren sind sehr einfach mit einem Raspberry Pi anzusteuern. Größere Schrittmotoren die mehr Strom benötigen brauchen einen stärkeren Motortreiber. Aber für einen Descision Maker oder einen kleinen Roboter ist der 28BYJ-48 Schrittmotor völlig ausreichend.












Recent Comments