
Hinweis:
Für beide Auflagen ergeben sich kleinere Anpassungen die ich hier beschrieben habe: Updates zum Buch – Roboter-Autos mit dem Raspberry Pi
Alle Komponenten die Sie für den Bau des Roboter-Atuos wie in meinem Buch “Roboter-Autos mit dem Raspberry Pi: Planen, bauen, programmieren“ beschreiben für den Bau benötigen finden Sie in der nachfolgenden Aufstellung. Das Buch selber ist ein zwei Teile bzw. Bauabschnitte unterteilt. Der erste Abschnitt beschreibt ein Roboter-Auto das über das Netzwerk ferngesteuert wird und der zweite Teil erweitert das Roboter-Auto hin zu einem voll autonom fahrenden Roboter-Auto. Entsprechend ist auch hier die Übersicht der Komponenten in diese zwei Abschnitte aufgeteilt. Möchten Sie weniger basteln und lieber einen fertigen Bausatz kaufen, so finden Sie verschiedene Roboter Bausätze für den Raspberry Pi unter dem folgenden Link “Roboter Bausätze” auf meiner Webseite.
Komponentenliste für ein ferngesteuertes Roboter Auto
Die Komponentenliste wird von mir immer wieder aktualisiert um die leichte Auffindbarkeit der Teile zu gewährleisten.

Roboter Auto Teil 1 2019
Raspberry Pi 4 Model B (4 GB RAM)
Ich empfehle den Raspberry Pi 4 Modell B mit 4 GB RAM für das Roboter Auto. Der Raspberry Pi 4 Modell B ist nicht mehr das aktuelle Modell aber mit seinen 4 GB RAM ist er ideal für das Roboter Auto. Er kann auch als Desktop Computer neben dem Roboter-Auto genutzt werden. So macht es einfach mit dem Raspberry Pi 4 Spaß unter Raspbian erste Erfahrungen mit Linux zu sammeln oder direkt auf dem Raspberry Pi z. B. zu programmieren. Der Raspberry Pi 4 verfügt über WIFI, Bluetooth, USB 3.0 Anschlüsse sowie über einen GBit Netzwerkanschluss.
")
Raspberry Pi 5 Model B (8 GB RAM)
Für alle die etwas mehr mit dem Raspberry Pi machen möchten und z. B. die neuesten Erweiterung der Raspberry Pi Foundation wie das Raspberry Pi AI Kit ausprobieren möchten ist der Raspberry Pi 5 mit 8 GB RAM ideal. Für das Roboter Auto kann er natürlich auch verwendet werden und so z. B. eine nach vorne gerichtete Kamera nutzen und eine als Rückfahrkamera da der Raspberry Pi 5 über zwei CSI Eingänge verfügt.

Micro SD-Karte 32 GB
Bei der micro SD-Karte ist es wichtig das Sie sich ein schnelles Modell kaufen. Es sollte ca. 20 MB/s schreiben können damit das Betriebssystem des Raspberry Pi nach dem Einschalten auch zügig geladen werden kann. Ich füge nachfolgend ein Modell auf aber es lohnt sich selber noch zu suchen da sich die Preise und die Angebote ständig ändern.

Raspberry Pi – Kameras im Überblick
Die neueste Raspberry Pi Kamera trägt die Versionsnummer 2.1. Dieses Kameramodul verfügt intern über einen Chip von Sony und nimmt ein sehr schönes Bild auf. Das neue Modul wird wie das Vorgängermodul perfekt von Raspbian unterstützt. Ich habe das normale Kameramodul und das NoIR-Modul in Verwendung. Das NoIR-Modul ist gut geeignet bei schlechten Lichtverhältnissen. Das Raspberry Pi Kamera Modul mit Weitwinkel Objektiv ist für das Roboter-Auto sehr gut geeignet da Sie ein größeres Blickfeld aufnimmt als die Module mit Standardobjektiv. Nachfolgend die beiden aktuellen Kameramodule und eines mit Weitwinkelobjektiv.
Standard RGB Kamera:

NoIR Kamera

Weitwinkel Kamera (meine Empfehlung)
Meistens haben die Weitwiklen Kameras für den Raspberry Pi noch den alten Chipsatz der Version 1.3 verbaut. Meine Erfahrung hat gezeigt, das für das Roboter-Auto eine Weitwinkelkamera sehr gut ist aber es nicht unbedingt die Version 2.1 des Kameramoduls sein muss.

Motortreiber L298N H-Brücke
Für den Antrieb des kleinen Roboter-Autos eignet sich eine H-Brücke mit der bis zu zwei Motoren unabhängig voneinander in der Geschwindigkeit geregelt werden können sehr gut. Es gibt viele verschiedene Modelle und ich zeige hier die beiden Modelle die ich immer im Einsatz habe. Eines ist klein und kompakt und das andere etwas größer verfügt dafür aber über LEDs die den Schaltzustand der H-Brücke anzeigen.
Ich verwende überwiegend das Modul mit den LEDs. Technisch unterscheiden sich beide Module weiter nicht groß.
Motortreiber mit LEDs (meine Empfehlung)
Hier das Modell des L298N Motortreibers mit den LEDs. So sieht man leichter ob die logische Verkabelung richtig ist oder nicht durch das aufleuchten der LEDs.

Dieses Modell ist kompakter und verfügt über keine LEDs funktioniert aber auch sehr gut für die Steuerung der Motoren. Für kleinere Roboter Auto Modelle ist dieser Mototreiber gut geeignet.
Kompakte Motortreiber ohne LEDs

Step-Down Converter (meine Empfehlung)
Damit Sie den Raspberry Pi mit Strom versorgen können bietet sich die Verwendung eines Step-Down Converters an. Das von mir empfohlende Modul verfügt über zwei USB Anschlüsse und kann bis zu 3A bei 5V abgeben. Somit ist es sehr gut für den Raspberry Pi 4 geeignet.

Motoren
Es gibt verschiedene Motoren mit denen Sie ein Roboter-Auto antreiben können. Sehr beliebt und von mir verwendet sind die gelben DC-Motoren die gleich mit einem passenden Rad geliefert werden. Diese gelben Motoren gibt es auch häufig zusammen mit einem Chassis aus Acryl-Glas. Weiter habe ich noch die Tamiya 70168 Getriebe-Motoren verbaut die sehr viel Kraft erzeugen und das gut hörbar machen.
Chassis mit Motoren (meine Empfehlung)
Ich empfehle gerne dieses Chassis das direkt mit vier Motoren geliefert wird sowie zwei Acrylglas platten, die die Basis für das Roboter Auto bilden. Ich habe von diesem Typ Chassis schon mehrere Roboter gebaut und war immer sehr zufrieden.

Standard Motoren (meine Empfehlung)
Wer nur die Motoren benötigt kann diese auch ohne Chassis erwerben.

Tamiya 70168 mit sehr viel Kraft
Ich habe diese Tamiya Motoren sehr gerne verbaut, da mit ihnen ein individuelles Roboter Auto recht einfach aufzubauen geht.
")
Radbefestigungen
Ich hatte lange gesucht bis ich diese Kupplungen gefunden habe. Mit ihnen lassen sich normale Räder aus dem RC-Modellbau auf einer Welle befestigen. Ich fand diese Lösung immer sehr praktisch. Nachfolgend drei dieser Kupplungen damit Sie eine Idee haben welche Typen es gibt.


Stromversorgung
Aus meiner Erfahrung heraus sollten Sie das Roboter-Auto mit Strom aus einer Batterie betreiben. Am besten funktioniert die Stromversorgung mit einem normalen RC-Akku. Der RC-Akku hat den Vorteil, dass das Roboter-Auto deutlich länger fährt und der Akku sich mit dem dazu gehörigen Ladegerädt flott aufläden läßt. Den Einsatz von Batterien empfehle ich nicht für den Bau des Roboter-Autos mit dem leistungsstarken Raspberry Pi 4 Model B.
RC-Akku Lösung (meine Empfehlung)
Ich habe jetzt diese Akkus seit ca. 2 Jahren im Einsatz und bin immer noch sehr zufrieden. Sie versorgen meine kleinen Roboter Modelle zuverlässig mit Strom
Zum Laden der RC Akkus gibt es verschiedene Ladegeräte. Ich selber habe mir eines von Carson gekauft und damit sehr gute Erfahrungen gemacht. Je nach Modell werden die Akkus mit bis zu 4A geladen. Hier kann man etwas im Amazon Store suchen ob man eher ein Ladegerät mit mehr Leistung haben möchte oder ob die Zeit zum Laden der Akkus nicht so relevant ist da man eh mehr Akkus besitzt.

Das Modell Carson 500607013 Expert Charger NiMH Compact 4A Lade Set habe ich z. B. für Schulungen im Einsatz und hier in Sechsfacher Ausführung. Da für das Tagestraining mit den Roboter-Autos bis zu 12 Akkus häufiger schnell geladen werden müssen hat sich dieses Modell für mich sehr bewährt.

Man ist auch immer gut beraten ein paar dieser Stecker zuhause zu haben. So habe ich mir schon einige Anschlusskabel selber gelötet und in den verschiedenen Roboter Modellen verbaut. Denn das immer wieder abschrauben und anschließen ist auf dauer für die Schrauben am Motortreiber nicht gut.

Externes Netzteil
Für den stationären Betrieb des Roboter-Autos verwende ich genau dieses externes Netzteil. Ich habe es schon seit Jahren und es funktioniert zuverlässig für ganz verschiedene Anwendungen. Dank dem Stellrad kann ich die Ausgangsspannung mit 5, 6, 7.5, 9, 12, 13,5, 15V meinen Bedurfnissen individuell anpassen.

Kabel
Die verschiedenen Kabel benötigen Sie um die elektronischen Komponenten wie den Motortreiber am Raspberry Pi anzuschließen sowie auch die Motoren. Es kann nie schaden ein paar mehr Kabel zu haben.
")
Bis zu dem Raspberry Pi Modell 3 wird ein micro-USB Kabel benötigt für die Stromversorgung.
 mit geflochtener Jacket in Schwarz - 0,3 Meter")
Ab dem Raspberry Pi Modell 4 wird ein USB-C Kabel für die Stromversorgung benötigt.

Dieser doppel-Draht mit zwei Adern wird z. B. benötigt um die Motoren am Motortreiber anzuschließen.

Abstandshalter
Für die Befestigung der elektronischen Komponenten wie den Raspberry Pi oder den Motortreiber eignen sich diese kleinen Abstandshalter aus Messing sehr gut. Mit der hier angebotenen Box steht einem eine große Auswahl von unterschiedlichen Längen zur Verfügung.

Werkzeug:
Die vielen kleinen Schrauben die geöffnet und geschlossen werden müssen bedürfen auch eines guten Werkzeuges damit diese nicht so schnell abgenutzt werden. Da hat sich das folgende kleine Werkzeugset bei mir gut bewährt.

Alle Komponenten für ein autonom fahrendes Roboter-Auto
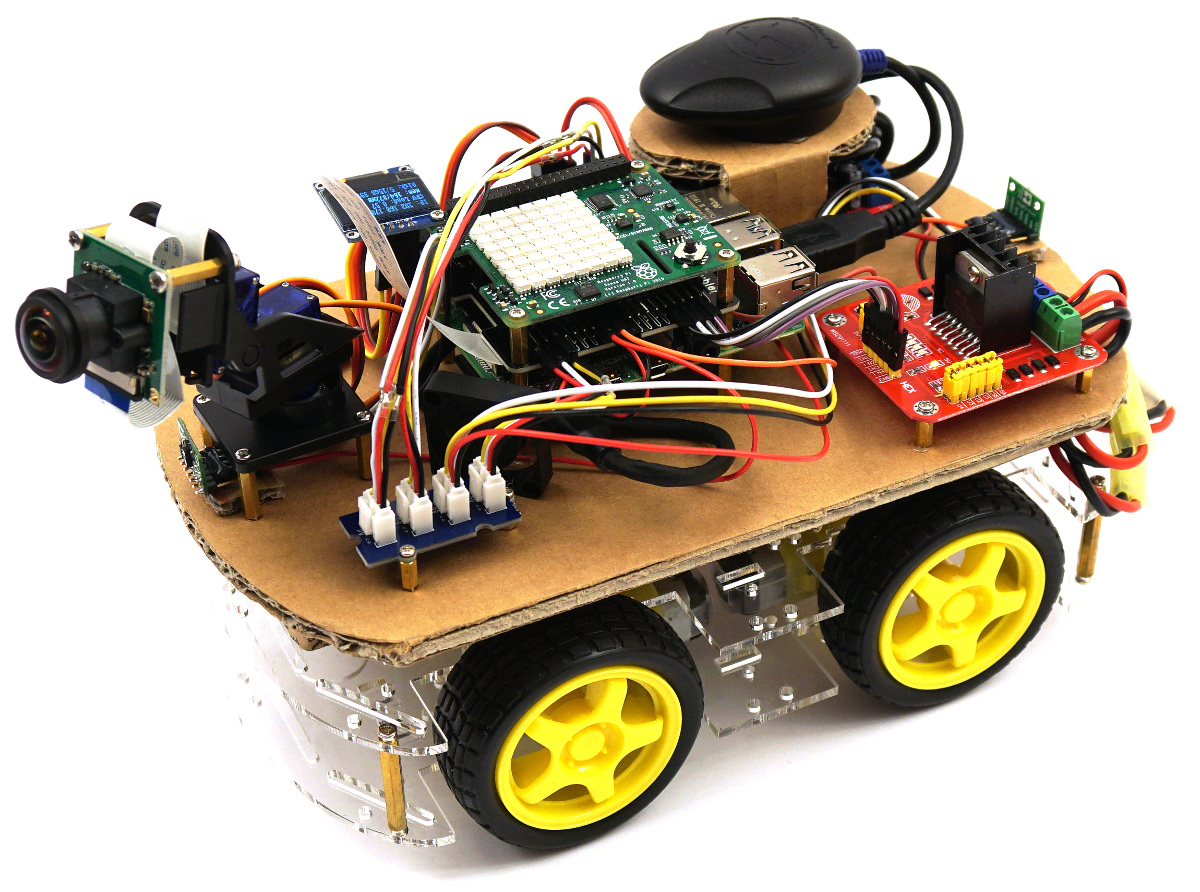
Möchten Sie das Roboter-Auto aus dem ersten Teil des Buches zu einem autonom fahrenden Roboter weiter entwickeln dann benötigen Sie noch die nachfolgenden Komponenten. Mit einem Time of Flight Sensor der mit einem Laser Abstände messen kann können Sie Hindernisse vor dem Roboter-Auto frühzeitig erkennen. Das Raspberry Pi Sense-HAT unterstützt Ihr Roboter-Auto dabei mit seinen verschiedenen Sensoren nicht die Orientierung während dem Fahren zu verlieren.
Das folgende Bild zeigt das autonom fahrende Roboter-Auto mit GPS-Empfänger, Raspberry Pi Sense-HAT und Time of Flight Sensor.
Roboter Auto Teil 2 2019
Raspberry Pi Sense-HAT
Damit das Roboter-Auto richtig autonom fahren kann benötigt es ein Gyroskop. Dieses ist im Raspberry Pi Sense-HAT integriert und hilft bei der Orientierung und Überwachung von Drehbewegungen des Roboter-Autos. Das Magnetometer des Sense-HAT kommt zum Einsatz wenn der Roboter GPS gesteuert fährt.

Time of Flight Sensor
Mit dem Time of Flight Sensor von Pololu können Sie zuverlässig und in einer schnellen Abfolge Hindernisse vor dem Roboter-Auto frühzeitig erkennen. Da dieser Sensor über den I²C Bus des Rasbperry Pi angeschlossen wird eignet er sich sehr gut für die Verwendung im Roboter-Auto wie in meinem Buch beschrieben.

Seeed Studio Grove – I2C-Hub
Mit dem I²C Hub von Grove sparen Sie sich die Arbeiter selber einen Hub zu bauen. Er bietet auch mit seinem Steckersystem eine Wackelkontakt freie Möglichkeit die verschiedenen Sensoren am I²C Bus des Raspberry Pis anzuschließen.

Seeed Studio Grove – I2C-Kabel
Mit diesen Set an Kabeln können alle Sensoren die am Roboter-Auto wie in meinem Buch beschrieben angeschlossen werden. Da die Kabel recht lang sind können diese individuell gekürzt werden?
")
GPS-Empfänger
Ich habe mehrere GPS-Empfänger ausprobiert und liste die beiden GPS-Module auf die bei mir unter Raspbian ohne Probleme funktioniert haben. Ich empfehle den Navilock GPS-Empfänger NL-602U USB da dieser mich durch seine Geschwindigkeit und Genauigkeit überzeugt hat.
Navilock NL-602U USB (meine Empfehlung)

167 Kanal USB GPS Empfänger – SkyTraQ Venus8 Chipsatz

Servokontroller
Es gibt verschiedene Modelle des Servokontrollers. Ich empfehle das günstige Modell zu kaufen, da es genau so funktioniert wie das deutlich teurere Modell von Adafruit welches in meinem Buch zu sehen ist.

Der Servokontroller von Adafruit ist deutlich teurer aber es wäre das von mir verbaute Modell.
 16-Channel 12-bit PWM/Servo Driver - I2C interface - PCA9685")
Port-Doubler
Mit dem Port-Doubler erweitern Sie die Anschlüsse Ihres Raspberry Pi Computers und können so ganz einfach das Raspberry Pi Sense-HAT und weitere Komponenten an der immer noch freien und um 90° gedrehten Steckerleiste anschließen.

Pan Tilt-Kit
Wird die Raspberry Pi Kamera auf dem Pan und Tilt Kit montiert kann diese den Blickwinkel auch nach oben und unten ändern sowie zur Seite. Dabei muss sich das Roboter-Auto nicht bewegen sondern kann still stehen.
")
OLED Display
Mit dem OLED Display können wichtige Informationen wie die aktuelle IP Adresse des Roboter-Autos direkt nach dem Einschalten angezeigt werden.
Game-Pad
Wer gerne sein Roboter-Auto mit einem Game-Pad steuern möchte kann sich z. B. folgendes Game-Pad kaufen. Dieses habe ich neben einem PS4 Kontroller ebenfalls ausprobiert und es hat gut funkioniert.








Recent Comments