


Ich baue seit ein paar Jahren Roboter-Autos die in der Wohnung und auch im Freien fahren können. Teilweise habe ich die Fahrzeuge mit einer USB GPS Maus ausgestattet, war aber immer wieder enttäuscht wie ungenau die empfangenen GPS Koordinaten sind. Die Genauigkeit die ich erreicht habe lag bei ca. 4 Metern wenn ich keine Filter eingesetzt habe. Dann habe ich mich auf die Suche nach einer GPS Lösung gemacht die deutlich genauer ist. Dabei bin ich immer wieder auf die RTK Bibliothek und den Begriff Differential GPS bzw. die GPS-Positionierung gestoßen. Professionelle Differential GPS Lösungen kosten allerdings viele tausend Euro. Diese professionellen Lösungen kann ich mir für meine Hobby Roboter-Autos bauen leider nicht leisten.
Wie auf dem Bild zu sehen ist verwende ich eine klassische USB GPS Maus die auf ca. 4 Meter genau ist.

Discoverer mit eine USB GPS Antenne
Eine vielversprechende Lösung habe ich dann mit der GNSS-Positionierung und einem Raspberry Pi unter Verwendung der RTKLIB gefunden. Die Abkürzung GNSS steht für Navigationssatellitensysteme. Die GNSS Lösung die ich mir genauer angeschaut habe trägt den Namen RasPiGNSS „Aldebaran“. Mit diesem Empfänger Modul soll es ermöglich sein die eigene Position sehr genau bestimmen zu können im RTK Modul. Sehr genau bedeutet, unter idealen Bedingungen, dass es möglich ist die Position des Roboter-Autos in einem Kreis mit einem Durchmesser von ca. 20 cm genau zu bestimmen. Innerhalb dieses Kreises befindet sich somit dann der Roboter. Allerdings ist der Aufbau etwas komplexer. Dazu dann aber mehr in einem separaten Artikel.
Ich werde hier auf meinem Blog den Projekt Fortschritt dokumentieren und einzelne Berichte zu Installation, dem Betrieb sowie über meine Erfahrungen schreiben.
Übersicht Aufbau RTK GPS-Positionierung Lösung
Die Architektur bzw. der Aufbau besteht aus zwei Teilen der Basisstation und der mobilen Einheit. Die von mir gewählte RasPiGNSS „Aldebaran“ Lösung kostet für eine Basisstation geschätzt ca. 300,- € und für die mobile Einheit die auf z. B. dem Roboter-Auto befestigt wird ca. 250,- €. So muss ich in Summe deutlich unter tausend Euro investieren und komme hoffentlich auf eine ähnliche Genauigkeit wie die viel teureren professionellen Lösungen. Wenn ich alles am Laufen habe werde ich die genauen Kosten veröffentlichen.
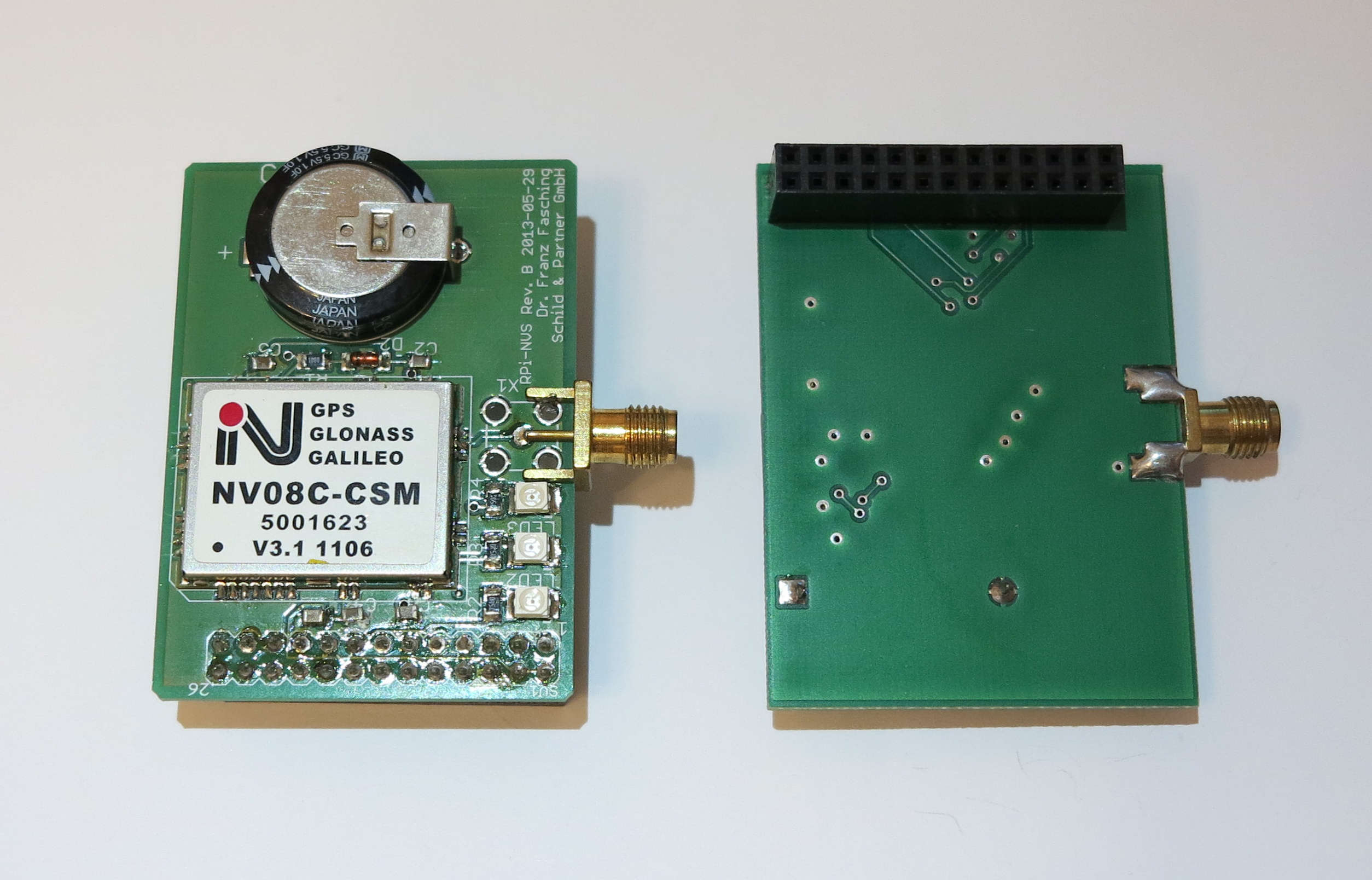
RasPiGNSS Module für die GPS-Positionierung
Der Aufbau besteht aus einer Basisstation die statoinär installiert wird und einer mobilen Station die auf dem Roboter-Auto befestigt ist. Die Basis Station kennt Ihre Possition und stellt die empfangenen GPS Daten als RTCM3 Stream der mobilen Einheit zur Verfügung. Die Mobilestation wird über eine Funkverbindung mit der Basisstation verbunden und empfängt den GPS Stream der Basisstation. So ist es möglich den Fehler der GPS Position des Roboter-Autos / der mobilen Einheit zu korrigieren. Damit alles klappt und funktioniert wird die folgende Hardware für die beiden RasPiGNSS Stationen benötigt:
Basisstation:
- Raspberry Pi 1 Model B (oder neuer)
- Micro-SD Karte (>= 8GB)
- GPS Modul RasPiGNSS „Aldebaran“
- GPS Antenne TW-2410
- XBee Pro Funkmodul
- XBee USB Adapter
- W-LAN Modul
- Gehäuse
[DE_BOOK_DETAIL DE_BOOK_DETAIL=“DE_BOOK_DETAIL“]
Mobilestation:
Die Mobile Station im Roboter-Auto bekommt genau den gleichen technischen Aufbau wie die Basisstation mit zwei Unterschieden zum Einsatz. Für die mobile Station empfehle ich einen Raspberry Pi 2 Model B oder neuer. Bei der GPS Antenne kann man etwas Geld sparen und das etwas günstigere Modell TW-4421 kaufen. Daher führe ich hier die Hardware für die mobile Station nicht weiter im Detail auf.
Die beiden RasPiGNSS „Aldebaran“ GPS Module habe ich auf zwei Raspberry Pi verbaut wie auf dem nachfolgenden Bild zu sehen ist.
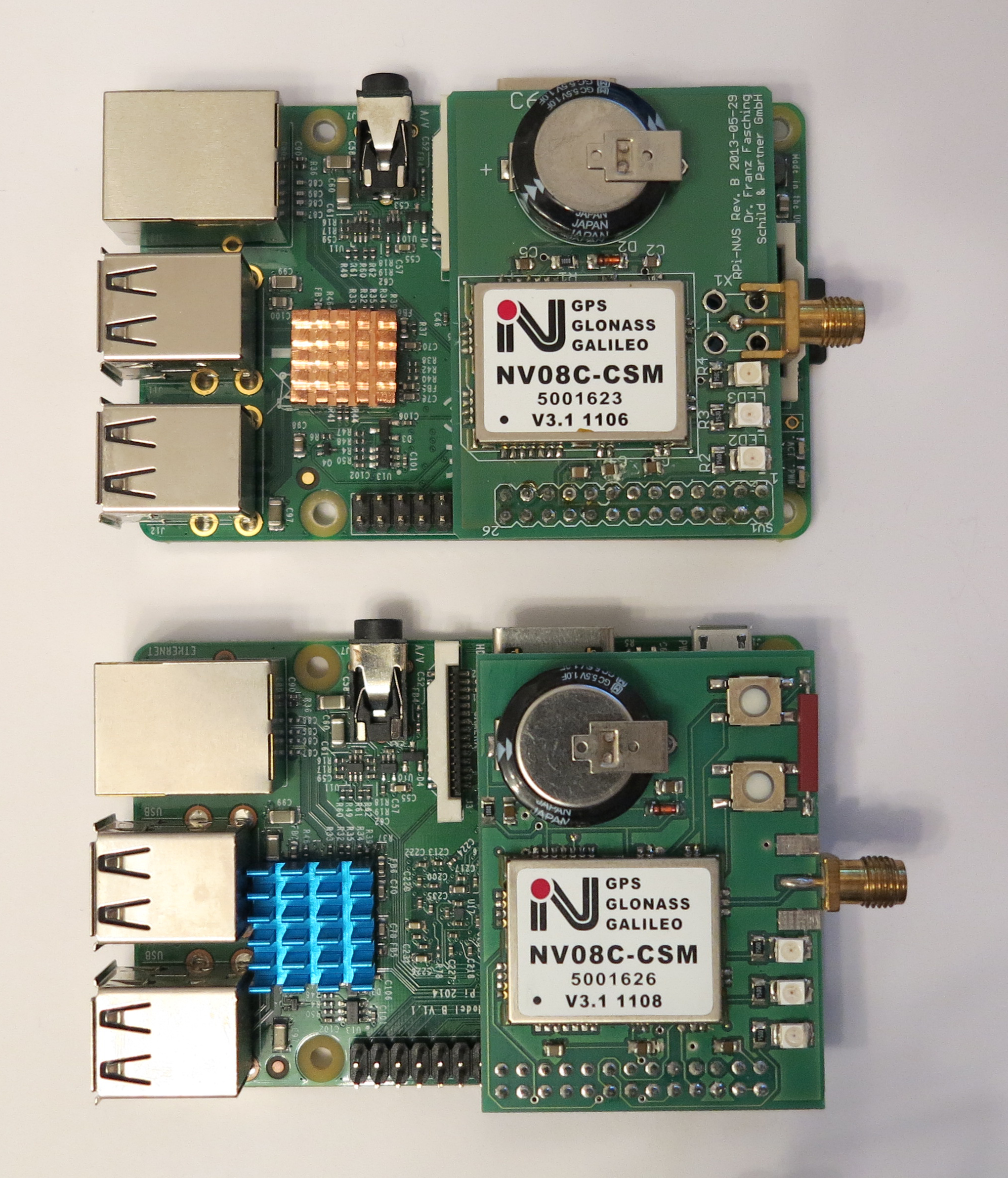
RasPiGNSS Module auf einem Raspberry Pi Computer
Bezugsquelle des RasPiGNSS „Aldebaran“
Gekauft habe ich die RasPiGNSS „Aldebaran“ GPS Module in Österreich über den online Shop von www.drfasching.at. Hier erhalten Sie auch gleich die passenden Antennen und eine Beratung welche Antennen abhängig von Ihrem Einsatzzweck benötigt wird. Ich habe mich via E-Mail ausgetauscht und die Ware sehr schnell erhalten.
Homepage und Shop: www.drfasching.at
Es gibt auch eine Präsentatin über dieses RasPiGNSS Modul welche auf einem Linux Tag präsentiert wurde. Die Unterlagen als PDF Datei dazu gibt es unter folgenden Link zum download: GLT16_Vortrag_FFasching.pdf
Die weitere Hardware wie den Raspberry Pi und die weiteren elektronischen Komponenten habe ich klassisch über Amazon bezogen.
Zusammenfassung
Die gesamte Hardware von Raspberry Pi über GPS Modul bis zu der passenden GPS Antenne kann alles recht einfach über das Internet bezogen werden. Zusammengebaut ist auch alles sehr schnell da die Komponenten entweder geschraubt oder gesteckt werden. So steht eine präzisen GPS-Positionierung nicht mehr im Weg. Etwas Zeit habe ich investiert das passende XBee Pro Modul für mich zu wählen. Hier war mit ein externer Antennenanschlus wichtig.
Artikel Übersicht GPS Modul RasPiGNSS:
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – EinführungPräzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB - Theoretischer Aufbau
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – GPS Antennen Aufbau
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – Software Installation
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – Konfiguration RTK Basisstation
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – Konfiguration RTK Mobile Einheit
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – XBee Funkverbindung Vorraussetzungen
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – XBee serielle Datenübertragung
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – Navigation
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – RasPiGNSS im Dauer-Betrieb
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – Erfahrungsbericht












Sehr interessant!! Ich arbeite gerade auch hobbymäßig an einem solchen Projekt, ich danke dir daher sehr für diesen Beitrag, durch den du mir den Einstig sehr erleichtert hast. Ich habe bisher nur rudimentäre Kenntnisse mit genauer Positionsbestimmung, und wollte jetzt einfach mal durch ein Projekt dem machbaren näher kommen. Vielen Dank für diesen Beitrag! Viele Grüße Matthias
Hallo Matthias,
vielen Dank für den netten Kommentar. Ich freue mich sehr wenn meine Anleitung interessieten weiter hilft.
Viel Erfolg,
Maker
Hallo,
hast Du mal versucht ohne Basisstation die Korrekturdaten vom SAPOS-EPS-Dienst über Internet zu beziehen. Dabei sollte eine ähnliche Genauigkeit erreichbar sein. Die Korrekturdaten der Landesvermessungsverwaltungen sind kostenfrei erhältlich. Eine Anmeldung ist jedoch erforderlich.
Herzliche Grüße
Olaf
Hallo Olaf,
nein ich persönlich habe das noch nicht probiert. Aber ich habe von Anwender z. B. in Australien in einem Bergwerk gehört, die mit diesem Aufbau wie ich diesen von der Hardware vorgenommen haben und einem Postprocessing extrem genaue Positonswerte erhalten haben. So war es sogar möglich bei dieser Firma im Bergwerk nicht nur die Veränderungen auf den Berg durch den Untertageabbau festzustellen sondern auch die Kräfte des Mondes auf den Berg je nach Positions und Entfernung dessen zu der Erde. Das fand ich schon sehr interessant aber dank diesem Artikel dachte ich mir es kann wirklich sein https://www.geo.de/natur/6497-rtkl-geologie-der-mond-stoert.