


Bis jetzt wurden im Roboter Auto zwei DC Motoren über einen L298N Motortreiber angesteuert. Aber mit dem verbauten Servo Kontroller ist natürlich viel mehr möglich da dieser noch zahlreiche Anschlüsse frei hat. An einen dieser freien Anschlüssen kann z. B. ein Servo Motor angeschlossen werden. Servo Motoren sind in Roboter wie humanoiden Roboter ganz normal und im Modellbau nicht weg zu denken. So wird die Lenkung von klassischen RC-Modellautos immer mit einem Servo Motor angesteuert. Daher möchte ich auch darauf eingehen wie ein Servo Motor mit dem ESP8266 NodeMCU und einem PCA9685 Servo Kontroller gesteuert werden kann.
Daher wird erst einmal ein kleiner Servo Motor benötigt und noch ein zusätzliches zwei Adern Kabel um den Servo Kontroller an eine 5V Spannung in unserem Roboter Auto anzuschließen. Denn ohne dieser zusätzlichen Stromversorgung am Servo Kontroller kann sich der Servo Motor nicht drehen.
Das nachfolgende Bild zeigt das Roboter Auto und den kleinen Servo Motor den ich am Servo Kontroller angeschlossen habe.
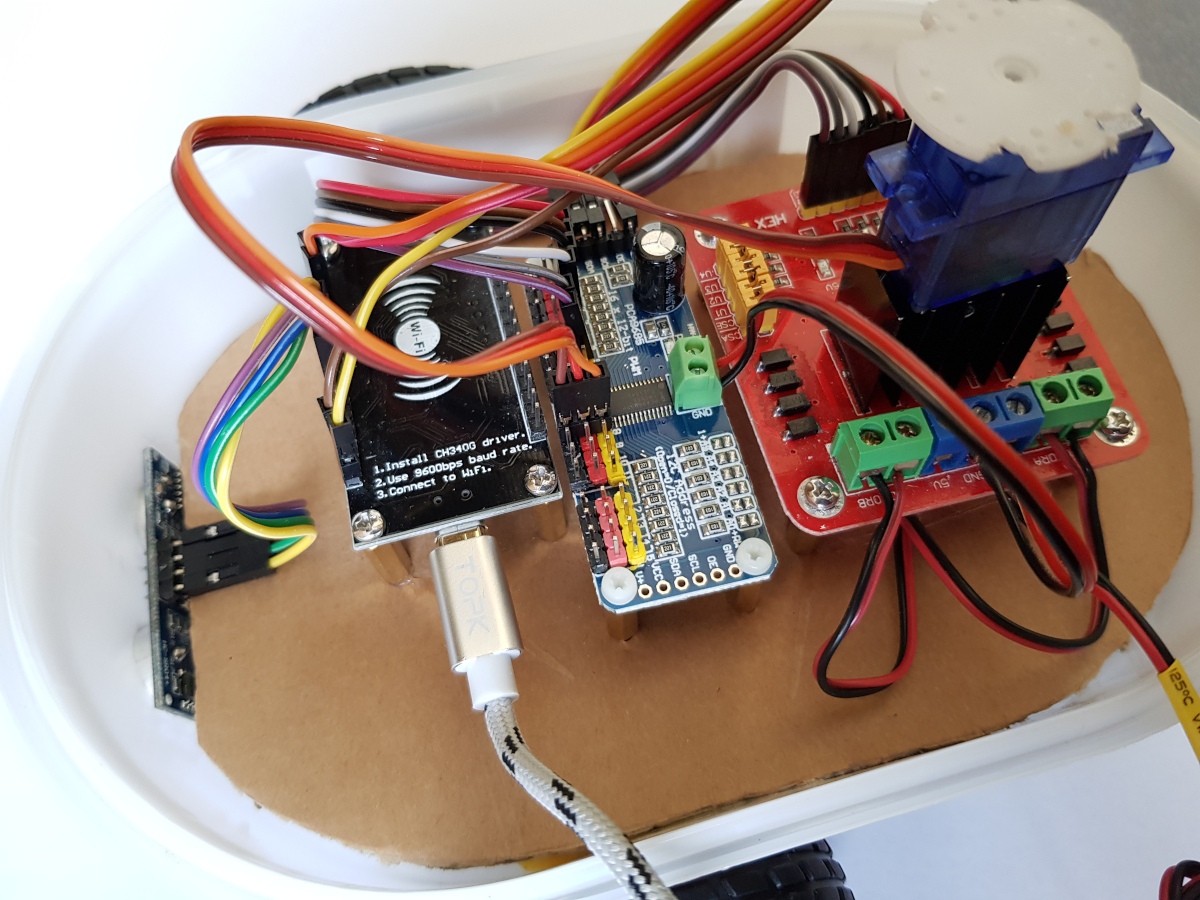
ESP8266 NodeMCU robot car servo motor
Materialliste
Wie immer füge ich hier die Links auf den Amazon Web-Shop ein. Wer größere Stückzahlen kaufen möchte um die Kosten z. B. niedrig zu halten sollte dies am besten direkt in China z. B. über Ali-Express machen.

Das Kabel das noch benötigt wird führe ich hier nicht auf. Ich gehe davon aus, dass schon ein kurzes Kabel vorhanden sein wird. Wenn nicht dann empfehle ich folgendes Kabel das ich immer und immer wieder in meinen Modellen verbaue.

Verkabelung
Damit der Servo Kontroller mit einer 5V Spannung versorgt wird empfehle ich ein Kabel am Anschlussterminal welches mit V+ und GND des Servo Kontrollers markiert ist anzuschließen. Das andere Ende des Kabels schließen Sie zusätzlich zu dem bereits angeschlossenen und abgeschnittenen USB Kabel am Motortreiber mit an. So erhält der Servo Kontroller über den Anschluss am Motortreiber eine Spannung von 5V. Da die meisten Servo Motoren mit 5V arbeiten ist diese Lösung ideal.
Im nachfolgenden Bild sieht man gut das Kabel das in einem weiten Bogen nach oben steht.
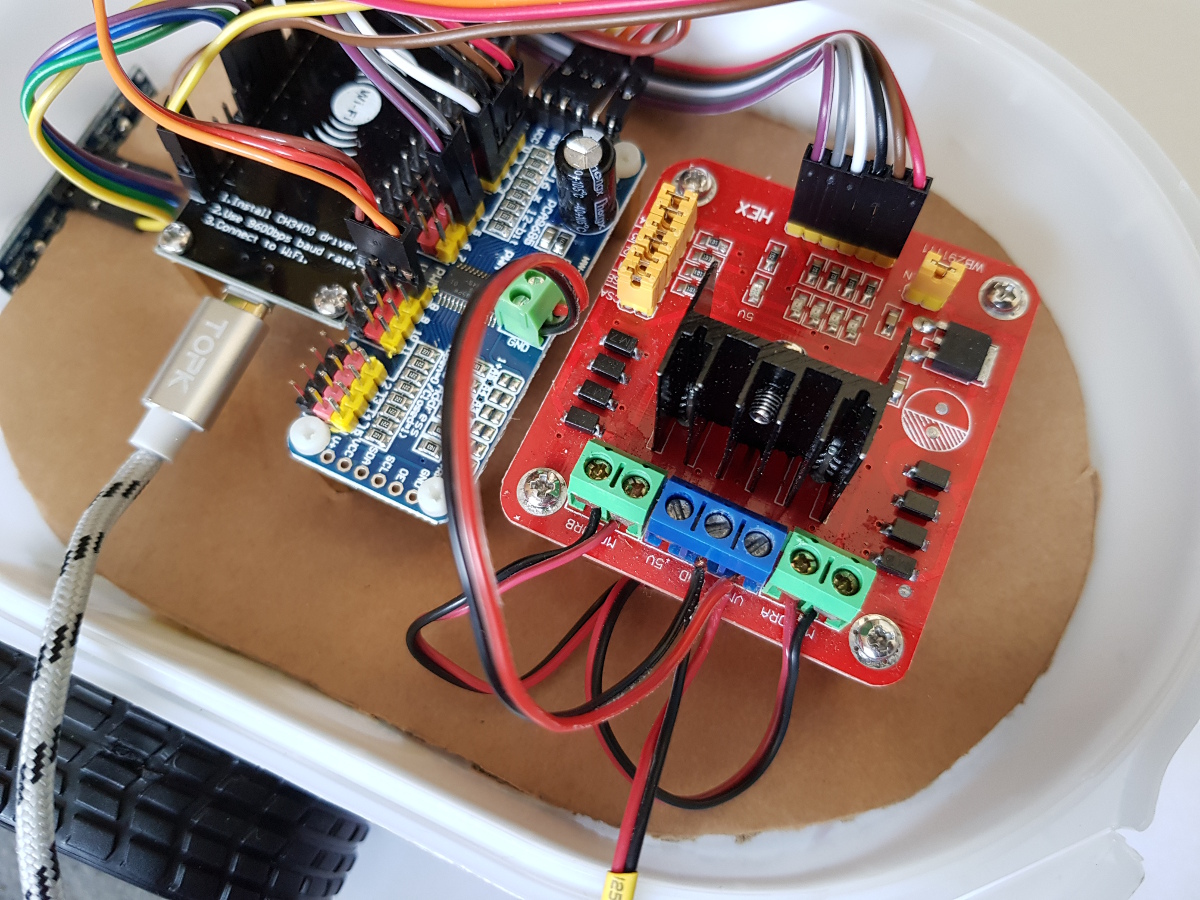
ESP8266 NodeMCU robot car PCA9685 power wire
Der Servo Motor mit seinem Kabel wird am Kanal 8 des Servo Kontrollers angeschlossen. Heer bitte darauf achten, dass das dunkle Kabel des 3er Steckers auf dem Pin des Kanal 8 angeschlossen wird der mit GND / schwarz gekennzeichnet ist. In der Mitte ist die Leitung mit 5V die meistens Rot ist und die helle meist Gelbe / Orange dritte Leitung ist für das PWM Signal. Über das PWM Signal erhält der Servo Motor die Information wie weit er drehen soll.
Im nachfolgendne Bild sind die Farben des Kabels das vom Servo Motor kommt und auf den farblich markierten Anschluss am Servo Kontroller aufgesteckt ist gut zu erkennen.

ESP8266 NodeMCU robot car servo motor
Programmierung Servo Motor Steuerung
Die Programmierung ist eigentlich wieder ganz einfach. Als Basis für mein kleines Programm und die Ansteuerung eines Servo Motors habe ich wieder auf ein Adafruit Beispielprogramm zurückgegriffen. Mit diesem kleinen Programm als Basis war die Ansteuerung des Servo Motors am Kanal 8 denkbar einfach.
Das Programm steht hier zum Download bereit: servo-test.zip
Video
Das Video ist nicht weiter aufregend zeigt aber wie sich der Motor dreht unter Verwendung des kleinen Programmes.

Zusammenfassung
Ich hoffe die kleine Anleitung war verständlich geschrieben und es ist jetzt klar wie ein Servo Motor angesteuert werden kann. Ab jetzt sollte es Dir möglich sein Dein individuelles Programm zu schreiben das z. B. eine Bürste die am Roboter montiert ist anhebt und senkt. Auch wäre es möglich den Ultraschall Sensor auf dem Servo Motor zu befestigen umso die das Umfeld um das Roboter Auto herum zu erkunden. Das macht aber eigentlich erst Sinn wenn auch ein Gyroskop im Roboter Auto verbaut ist um das Roboter Auto exakt in eine bestimmte Richtung drehen zu können.
Artikel Übersicht ESP8266 NodeMCU Roboter Auto:
Roboter bauen mit dem ESP8266 Entwicklungsboard – EinleitungRoboter bauen mit dem ESP8266 Entwicklungsboard – Stromversorgung
Roboter bauen mit dem ESP8266 Entwicklungsboard – Bauteile
Roboter bauen mit dem ESP8266 Entwicklungsboard – Chassis
Roboter bauen mit dem ESP8266 Entwicklungsboard – Verkabelung Teil 1
Roboter bauen mit dem ESP8266 Entwicklungsboard – Verkabelung Teil 2
Roboter bauen mit dem ESP8266 Entwicklungsboard – Arduino Entwicklungsumgebung einrichten
Roboter bauen mit dem ESP8266 Entwicklungsboard – Ultraschall Sensor und Motorensteuerung
Roboter bauen mit dem ESP8266 Entwicklungsboard – WIFI Fernsteuerung
Roboter bauen mit dem ESP8266 Entwicklungsboard – Servo Motor Steuerung
Roboter bauen mit dem ESP8266 Entwicklungsboard – OLED Display
Roboter bauen mit dem ESP8266 Entwicklungsboard – Magnetometer
Roboter bauen mit dem ESP8266 Entwicklungsboard – GPS Empfänger Einführung
Artikel Ausblick:
Roboter bauen mit dem ESP8266 Entwicklungsboard – GyroskopRoboter bauen mit dem ESP8266 Entwicklungsboard – GPS Wegpunkte
Roboter bauen mit dem ESP8266 Entwicklungsboard – Solarzelle












Recent Comments