

Updates zum Buch – Roboter-Autos mit dem Raspberry Pi
Das Buch Roboter-Autos mit dem Raspberry Pi in der Auflage von 2016 und 2019 das ich geschrieben...
Weiterlesen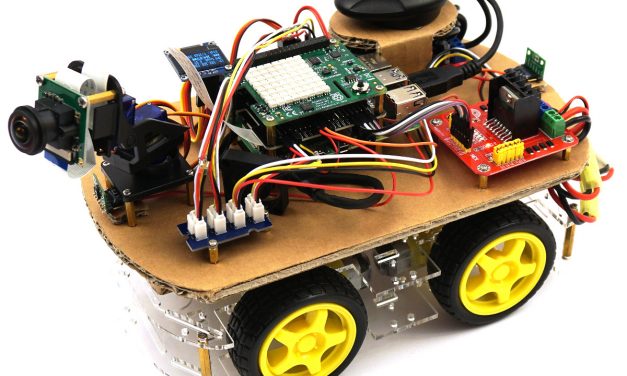
Das Buch Roboter-Autos mit dem Raspberry Pi in der Auflage von 2016 und 2019 das ich geschrieben...
Weiterlesen
Im November 2016 haben Adam Conway und Will Roscoe das Donkey Car Projekt ins Leben gerufen. Die...
Weiterlesen
Diese Aufstellung der Komponenten für den Bau eines Donkey Cars auf Basis des Jetso Nano und...
Weiterlesen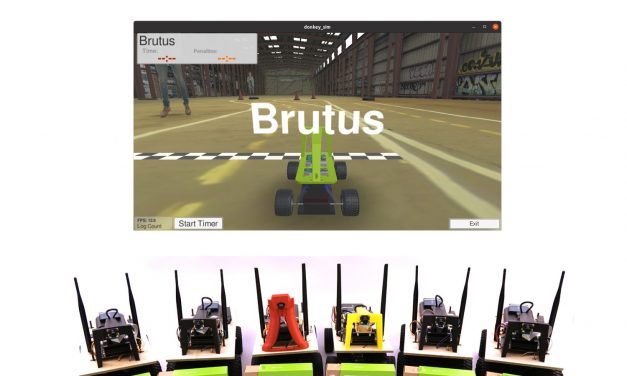
Seit längerem arbeite ich an einer Dokumentation die sich dem Thema Donkey Car annimmt. Dieses...
Weiterlesen
Jetzt geht es darum die OpenBot App für Dein Android Smartphone selber kompilieren zu können. Wenn...
WeiterlesenRoboter-Autos mit dem Raspberry Pi

Recent Comments