


Damit wir den L298N Motortreiber mit dem ESP32-CAM Modul ansteuern können benötigen wir den PCA9685 Servo Kontroller. Der Servo Kontroller und das OLED Display werden über den I2C Hub am I2C Bus des ESP32-CAM angeschlossen. Im vorherigen Artikel haben wir gesehen wie wir den I2C Bus zugänglich machen können durch die Nutzung der beiden Pins 1 und 3. Da wir aus dem vorherigen Artikel wissen, dass der I2C Bus generell über diese beiden Pins arbeiten kann und das angeschossene OLED Display die IP Adresse ausgegeben hat können wir weiter an der Steuerung der Motoren des Roboter Autos bauen.
Dazu kommt jetzt der PCA9685 Servo Kontroller zum Einsatz der am bersten über einen selbst gebauten I2C Hub zusammen mit dem OLED Display am ESP32-CAM angeschlossen wird. Wie solch ein I2C Hub gebaut werden kann habe ich im folgenden Artikel I²C Hub selber bauen bereits beschrieben.
I2C Hub
Damir wir jetzt genug Anschlussmöglichkeiten haben um unsere verschiedenen I2C Geräte am ESP32-CAM anschließen zu können kommt der selbst gebaute I2C Hub zum Einsatz.
Verkabelung des I2C Hubs
Der I2C Hub wird am I2C Bus bzw. den beiden Pins 1 und 3 sowie an dem 3,3V Pin und GND Pin des ESP32-CAM angeschlossen. Je nach größe des I2C Hubs können n-Geräte angeschlossen werden. Wichtig ist nur, dass die einzelnen Geräte in Summer nicht zu viel Energie benötigen. Wenn das der Fall sein sollte, dann müsste hier eine extra Sromversorgung umgesetzt werden.
Das folgende Bild zeigt die Verkabelung des I2C Hubs. Das Prinzip kennen wir bereits aus dem Artikel zum OLED Display.
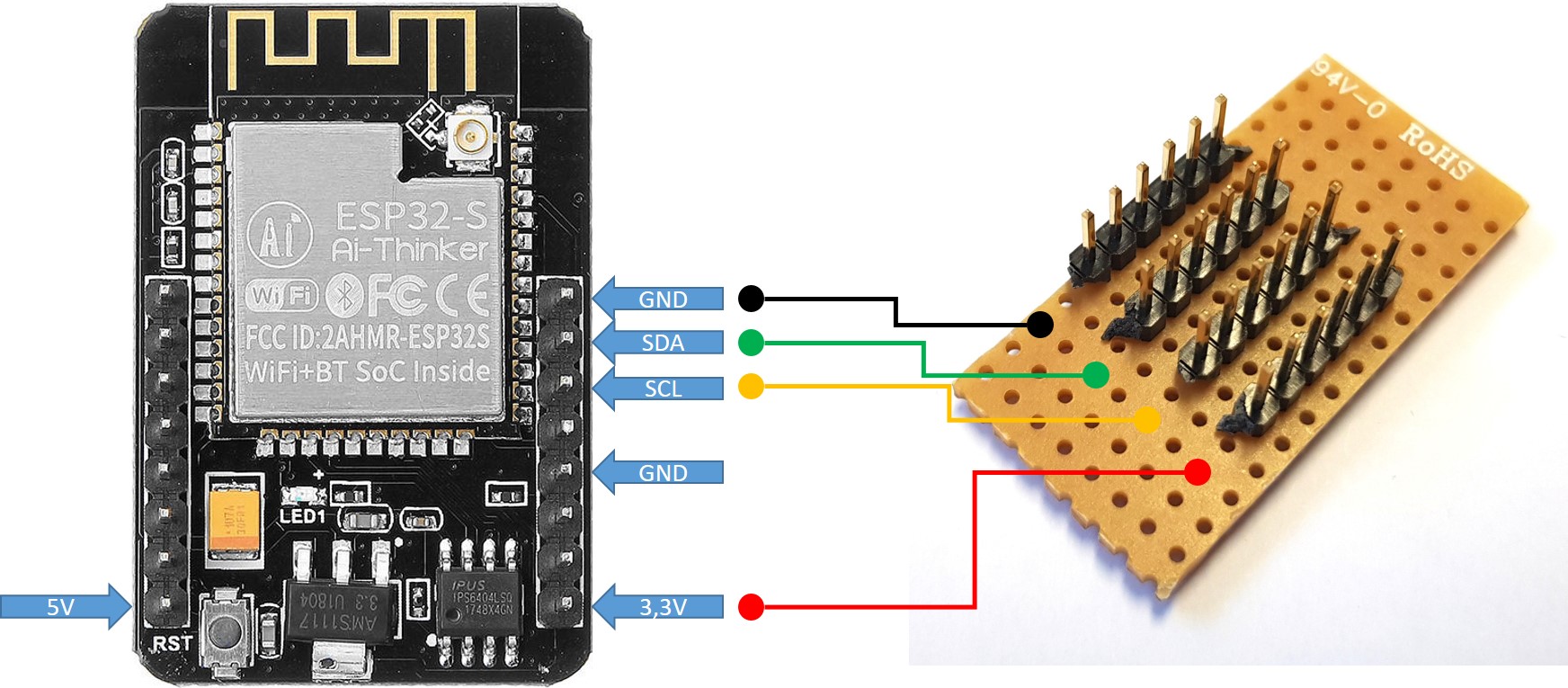
ESP32-CAM I2C Hub connection
Wenn der I2C Hub am ESP32-CAM angeschlossen ist kann es weiter gehen mit der Verkabelung. Jetzt können noch der PCA9685 Servo Kontroller und das OLED Display am I2C Hub angeschlossen werden. Mit dem folgenden Bild zeige ich Dir wie Du das machen solltest.
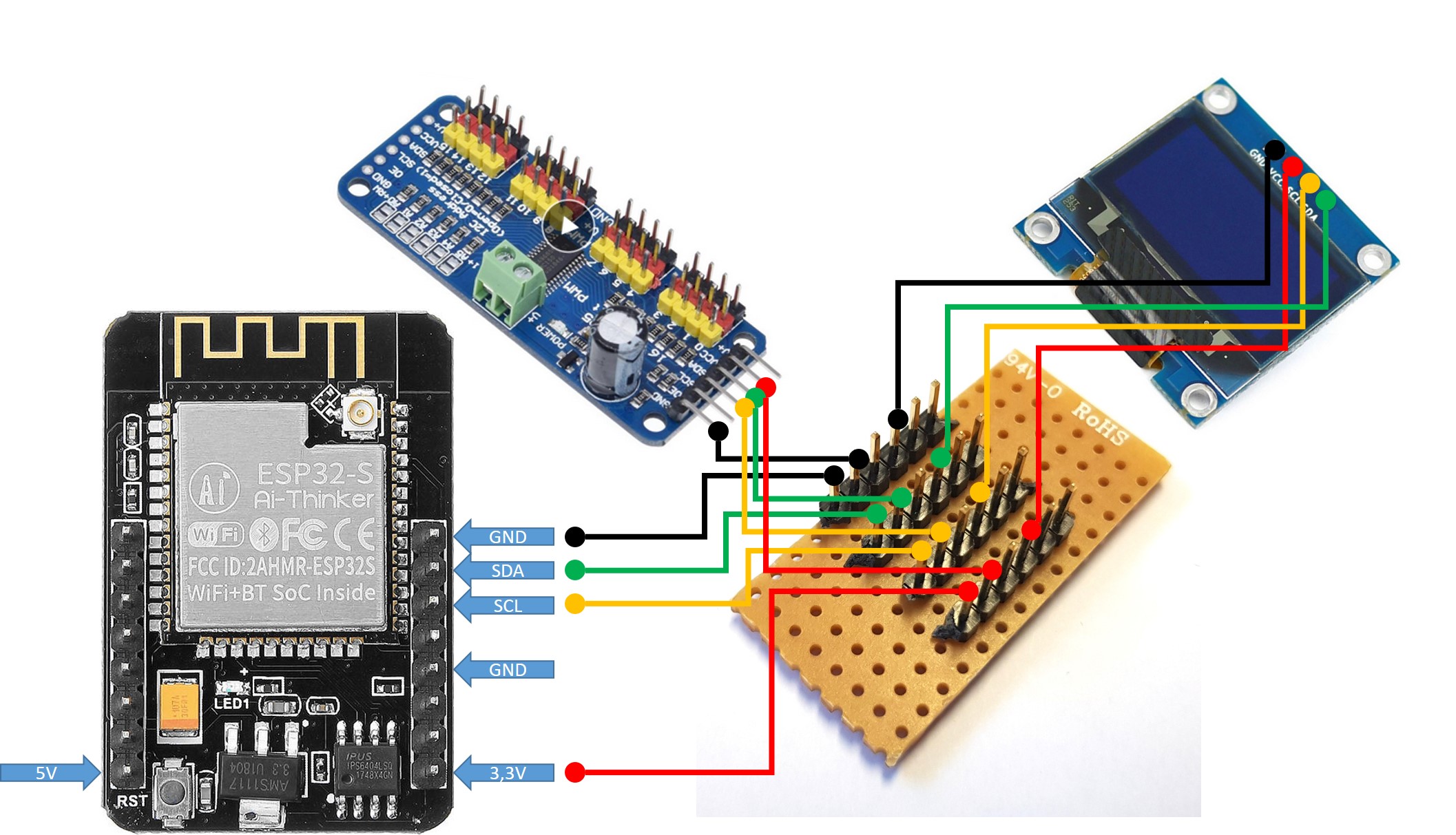
ESP32-CAM I2C-Hub connection devices
Wenn Du alle Kabel gesetzt hast und alle Komponenten angeschlossen sind geht es weiter mit der Beschreibung wie jetzt der ESP32-CAM noch programmiert werden kann.
Wie programmiere ich jetzt den ESP32-CAM?
Jetzt sind alle I2C Geräte angeschlossen und verkabelt und die beiden Pins 1 und 3 ja am I2C Hub als SDA und SCL angeschlossen. Ich habe dann zum Programmieren des ESP32-CAM ganz einfach an zwei freien Pins des I2C Hub den USB-Serial Adapter für RX und TX angeschlossen. Wenn jetzt wieder der IO0 Pin mit einem der GND Pins verbunden wird kann der ESP32-CAM wieder über die Arduino IDE programmiert werden. Das folgende Bild zeigt euch noch einmal die von mir gewählte Verkabelung.
Hinweis: Wenn das Programm dann auf den ESP32-CAM geschrieben wurde zeigt der Serielle Monitor der Arduino IDE nicht sinnvolles mehr an da ja die I2C Signale im RX/TX Pin anliegen. Aber bei mir hat so die Programmierung nach wie vor funktioniert ohne das ich die Verkabelung des I2C Hubs entfernen musste.
Wie auf dem Bild zu sehen ist erfolgt die Stromversorgung des Setups jetzt wieder über den USB-Serial Adapter und nicht mehr über den 5V oder USB Anschluss des ESP32-CAM
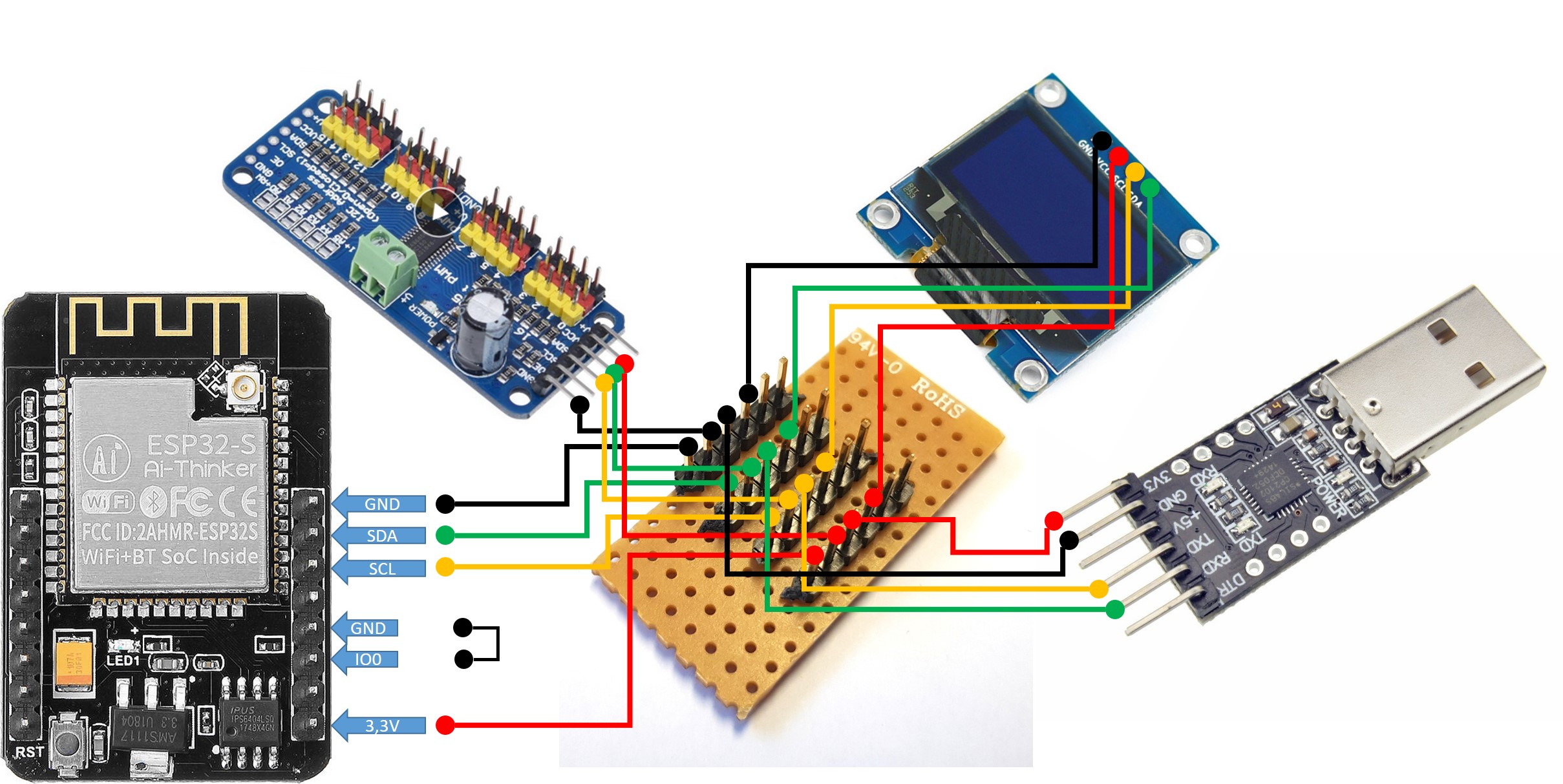
ESP32-CAM I2C-Hub connection usb serial adapter
Fertig verkabelt sieht jetzt das Roboter Auto wie auf dem folgenden Bild gezeigt aus mit Servo Kontroller und OLED Display.
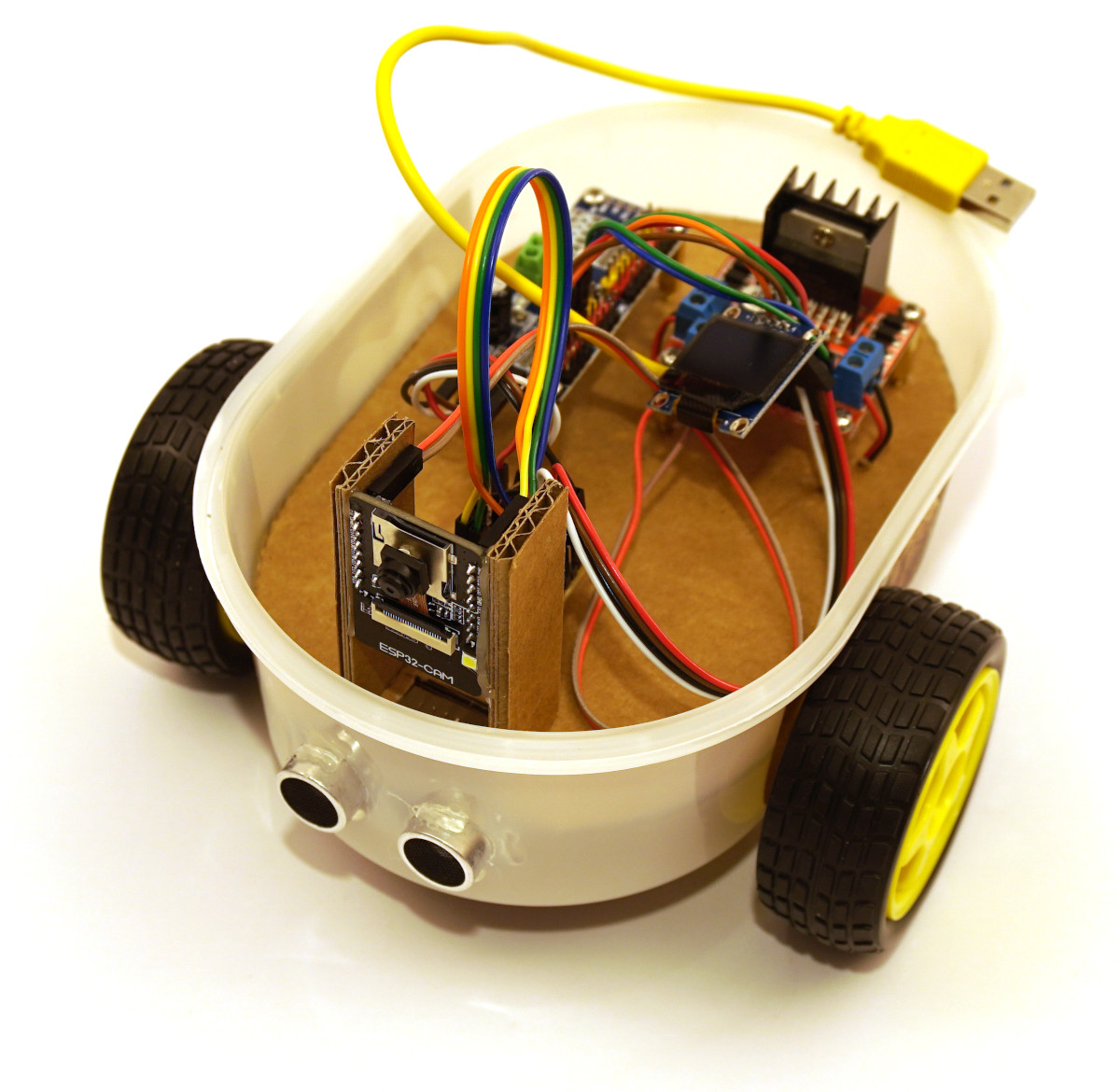
ESP32-CAM OLED display
Zusammenfassung
Mit dem Bau des I2C Hubs wurde in diesem Artikel die Basis gelegt eine Viehlzahl an Sensoren und Aktoren am ESP32-CAM anschließen zu können. Am I2C Hub wurden jetzt der Servo Kontroller und das OLED Display angeschlossen. Wenn Du alles so angeschlossen hast wie beschrieben, dann sollte die Programmierung des Roboter Autos im folgenden Artikel kein Problem sein und funktionieren.
Artikel Übersicht ESP32-CAM Roboter Auto:
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Projekt StartESP32-CAM Roboter Auto mit live Video Stream selber bauen - Entwicklungsumgebung einrichten
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - USB-Serial Adapter Verkabelung
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Live Video Streaming Software aufspielen
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Baue Dein Chassis
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Verkabelung allgemein
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Verkabelung des I²C Hubs
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Roboter Auto Beispielprogramme
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – WIFI Fernsteuerung programmieren
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – externe WIFI antenne anschließen
Meine persönliche Buchempfehlung:
Für alle die noch mehr Vorhaben mit ihrem Arduino oder Arduino Klonen wie dem ESP-32 Cam Modul kann ich das Buch "Arduino: Das umfassende Handbuch" von Dr. Claus Kühnel empfehlen. Es erklärt sehr viel im Bereich der Elektronik mit wirklich gutem Hintergrundwissen und vielen Details zu Sensoren, LEDs, Displays etc. die einem davor schützen unzählige Fehler zu machen. So spart man sich viel Frust, Zeit und Geld für neue Bauteile. Daher ist dieses Buch das ideale Nachschlagewerk für Einsteiger sowie erfahrene Bastler die gerne in einem Buch nachschlagen und auf Qualität setzen.












Recent Comments