


Damit das ESP32-CAM Modul programmiert werden kann muss dieses zunächst einmal mit dem PC verbunden werden. Da es selber nicht über eine USB Schnittstelle verfügt muss der USB-Serial Adapter verwendet werden. In dem von mir in der Komponentenliste aufgeführten ESP32-CAM Modul ist bereits ein solcher Adapter mit im Lieferumfang dabei. Ich selber habe einen ähnlichen Adapter verwendet den ich schon häufiger bei ähnlichen Projekten im Einsatz hatte. Das Prinzip ist immer das gleiche, dass der ESP-32 mit Female-to-Female Jumper Kabeln zunächst einmal mit dem USB-Serial Adapter verbunden werden muss.
Das folgende Bild zeigt welche Pins wie verbunden werden müssen damit die Kommunikation über die serielle Schnittstelle des ESP32-CAM Moduls erfolgen kann.
Hinweis: Bitte achte darauf, dass Dein USB-Serial Adapter den ESP32 mit einer 3,3V Spannung versogt und nicht mit 5V. Die meisten Adapter haben entweder beide Spannungen heraus geführt oder einen Umschalter in Form eines Jumpers auf der Platine. Versorgst Du den ESP32 mit 5V statt mit 3,3V kann es zu Beschädigungen des Moduls kommen.

ESP32-CAM serial connection
Die folgende Tabelle zeigt Dir wie die Verkabelung auf der Seite des USB-Serial Adapters erfolgt.
| ESP32-CAM | USB-Serial Adapter |
| GND | GND |
| TX | RX |
| RX | TX |
| 3,3V | 3,3V |
Wichtig ist, dass bevor der ESP32 für das Programmieren eingeschalten wird einer der GND Kontakte mit dem IO0 Pin verbunden wird. Nur dann kann der ESP32 programmiert werden. Das folgende Bild zeigt die Verkabelung des ESP32 mit einem USB-Serial Adapter. Die Verkabelung ist immer Gleiche auch wenn der USB-Serial Adapter eventuell etwas anders aufgebaut sein sollte.
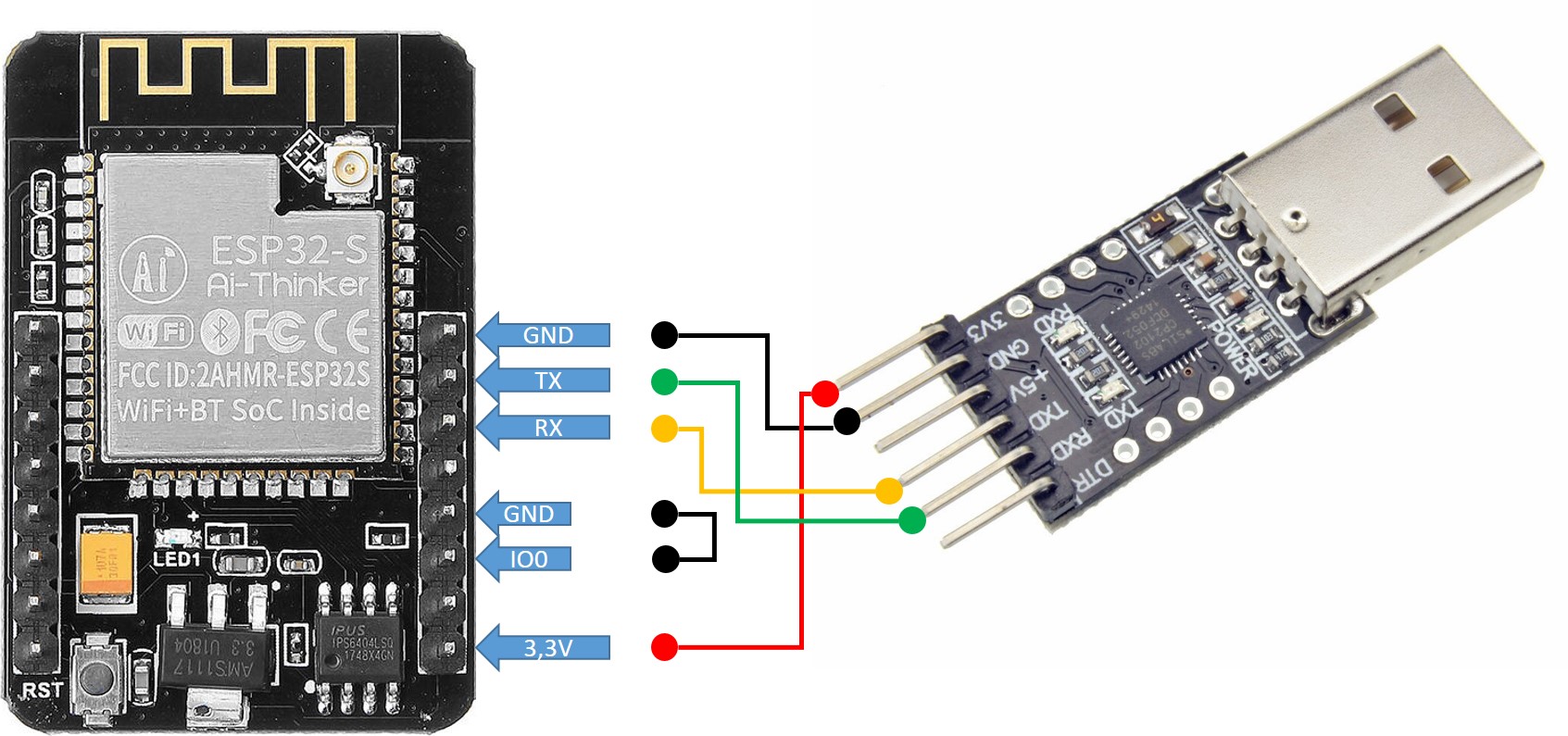
ESP32-CAM serial connection flash mode
Ich habe mir noch ein USB-A Verlängerungskabel gekauft um den USB-Serial Adapter leichter an meinen PC anschließen zu können. Denn es passiert leicht, dass nach mehrfachen Stecken und wieder lösen die Female-to-Female Jumperkabel nicht mehr richtig fest sitzen.

Wenn Du jetzt den USB-Serial Adapter mit verbundenen ESP32 Modul an Deinem PC anschließt und die Arduino Entwicklungsumgebung startest sollte das ESP32-CAM Modul erkannt werden. Wichtig ist jetzt den richtigen Port in der Arduino Entwicklungsumgebung auszuwählen über welchen der USB-Serial Adapter erreichbar ist.
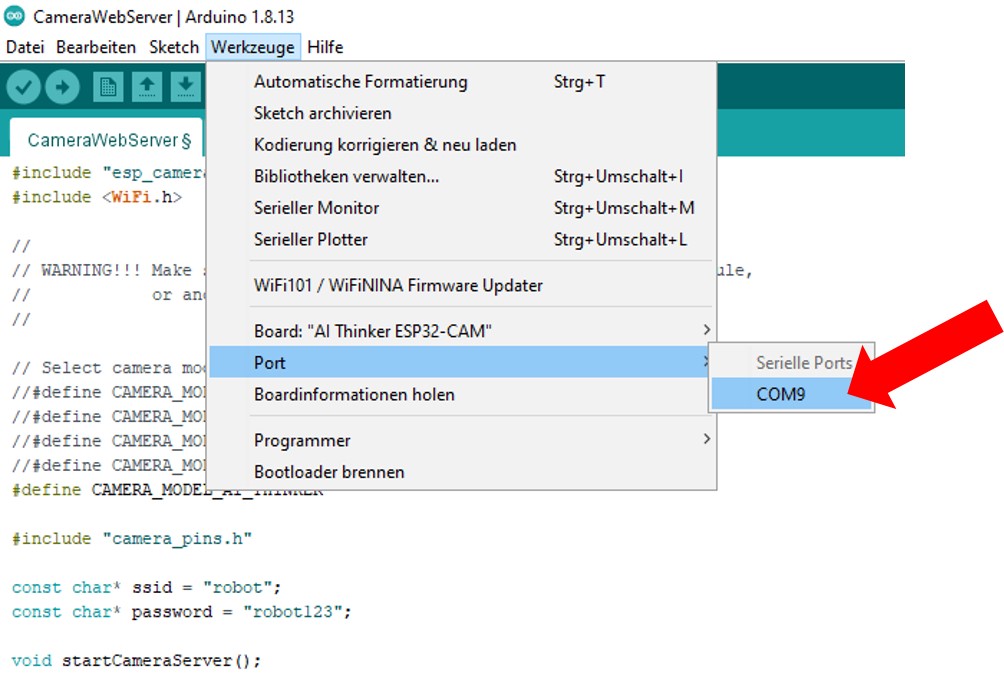
ESP32-CAM Arduino IDE Port
Hinweis: Falls das ESP32 Modul nicht erkannt wird kann ein Fehler in der Verkabelung vorliegen oder aber auch ein Problem mit der Unterstützung des USB-Serial Adapters an Deinem PC. Wenn der USB-Serial Adapter nicht erkannt wird müssen eventuell noch die notwendigen Treibers des Herstellers installiert werden.
Zusammenfassung
Du hast in diesem Beitrag gelernt wie Du Dein ESP32-CAM Modul mit dem USB-Serial Adapter verbindest. Wenn dann auch noch der USB-Serial Adapter an Deinem PC erkannt wurde hast Du alle Hürden genommen. Ab jetzt kannst Du Dein ESP32 Modul programmieren und z. B. das Beispielprogramm für das Videostreaming aufspielen. Im jetzt folgenden Kapitel werden wir genau dieses kleine Programm auf das ESP32-CAM Modul flashen und uns den ersten live Video Stream der Kamera anschauen.
Artikel Übersicht ESP32-CAM Roboter Auto:
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Projekt StartESP32-CAM Roboter Auto mit live Video Stream selber bauen - Entwicklungsumgebung einrichten
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - USB-Serial Adapter Verkabelung
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Live Video Streaming Software aufspielen
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Baue Dein Chassis
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Verkabelung allgemein
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Verkabelung des I²C Hubs
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Roboter Auto Beispielprogramme
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – WIFI Fernsteuerung programmieren
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – externe WIFI antenne anschließen
Meine persönliche Buchempfehlung:
Für alle die noch mehr Vorhaben mit ihrem Arduino oder Arduino Klonen wie dem ESP-32 Cam Modul kann ich das Buch "Arduino: Das umfassende Handbuch" von Dr. Claus Kühnel empfehlen. Es erklärt sehr viel im Bereich der Elektronik mit wirklich gutem Hintergrundwissen und vielen Details zu Sensoren, LEDs, Displays etc. die einem davor schützen unzählige Fehler zu machen. So spart man sich viel Frust, Zeit und Geld für neue Bauteile. Daher ist dieses Buch das ideale Nachschlagewerk für Einsteiger sowie erfahrene Bastler die gerne in einem Buch nachschlagen und auf Qualität setzen.












Recent Comments