


Im ESP32-CAM Roboter Auto werden zwei kleine 6V Getriebemotoren verwendet. Diese gelben Motoren sind sehr beliebt und kommen häufig in günstigen Roboter-Bausätzen zum Einsatz. In diesem Beitrag geht es um die Verkabelung der Motoren, des Motortreibers und der Stromversorgung – Schritt für Schritt erklärt und mit hilfreichen Bildern ergänzt. Damit der Artikel nicht zu lang wird, ist dieser Teil 1 der Anleitung zur vollständigen Verkabelung.
Getriebemotoren verkabeln
Jeder Getriebemotor benötigt zwei Kabel für die Stromversorgung. Bevor du mit dem Löten beginnst, solltest du die Motoren aus dem gelben Kunststoffgehäuse entnehmen. Das verhindert Schäden durch den Lötkolben am Gehäuse.
Löse dazu vorsichtig mit einer Zange die kleine Lasche an der Rückseite der Motoren, dann lassen sich diese leicht herausnehmen. Anschließend je ein rotes und ein schwarzes Kabel an die Kupferlaschen des Motors löten.
Hinweis: Die Kabel sollten beim späteren Einbau ins Gehäuse in Richtung der Chassis-Innenseite zeigen, nicht seitlich nach außen verlaufen.

ESP8266 NodeMCU robot car dc motor mount final
Nachdem die Motoren wieder im Gehäuse eingebaut wurden, werden die Kabel durch eine kleine Öffnung im Komponententräger (Pappe mit Elektronik) nach oben geführt.
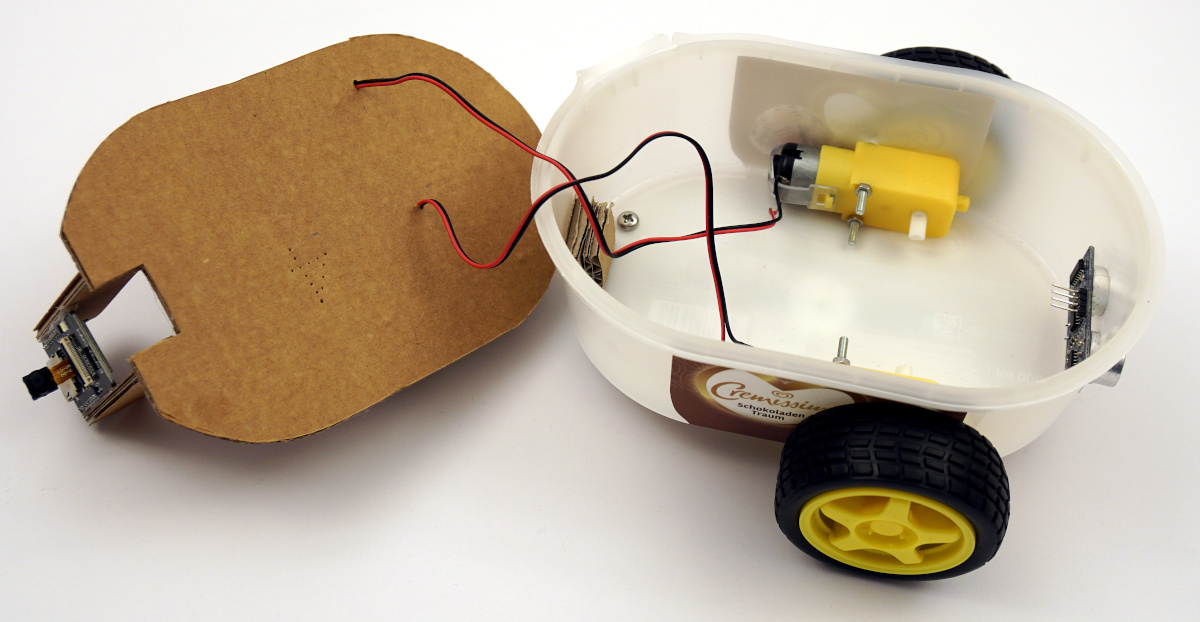
ESP32-CAM robot chassis
Motortreiber mit dem Servo Kontroller verbinden
Der Motortreiber L298N hat sechs Steuer-Pins: ENA, IN1, IN2, IN3, IN4 und ENB. Diese werden mit dem PCA9685 Servo Kontroller verbunden.
Geschwindigkeit steuern
Die Pins ENA (für Motor 1) und ENB (für Motor 2) erhalten ein PWM-Signal vom Servo Kontroller. So lässt sich die Drehgeschwindigkeit variieren.
Drehrichtung steuern
Die Pins IN1 und IN2 sind für Motor 1 zuständig, IN3 und IN4 für Motor 2. Durch Kombination von HIGH- und LOW-Signalen lässt sich die Fahrtrichtung kontrollieren.
Verkabelungstabelle
| L298N Motortreiber | PCA9685 Servo Kontroller |
| ENA | Kanal 0 |
| IN1 | Kanal 1 |
| IN2 | Kanal 2 |
| IN3 | Kanal 3 |
| IN4 | Kanal 4 |
| ENB | Kanal 5 |
Verwende für die Verbindung sechs Female-to-Female Jumper Kabel.
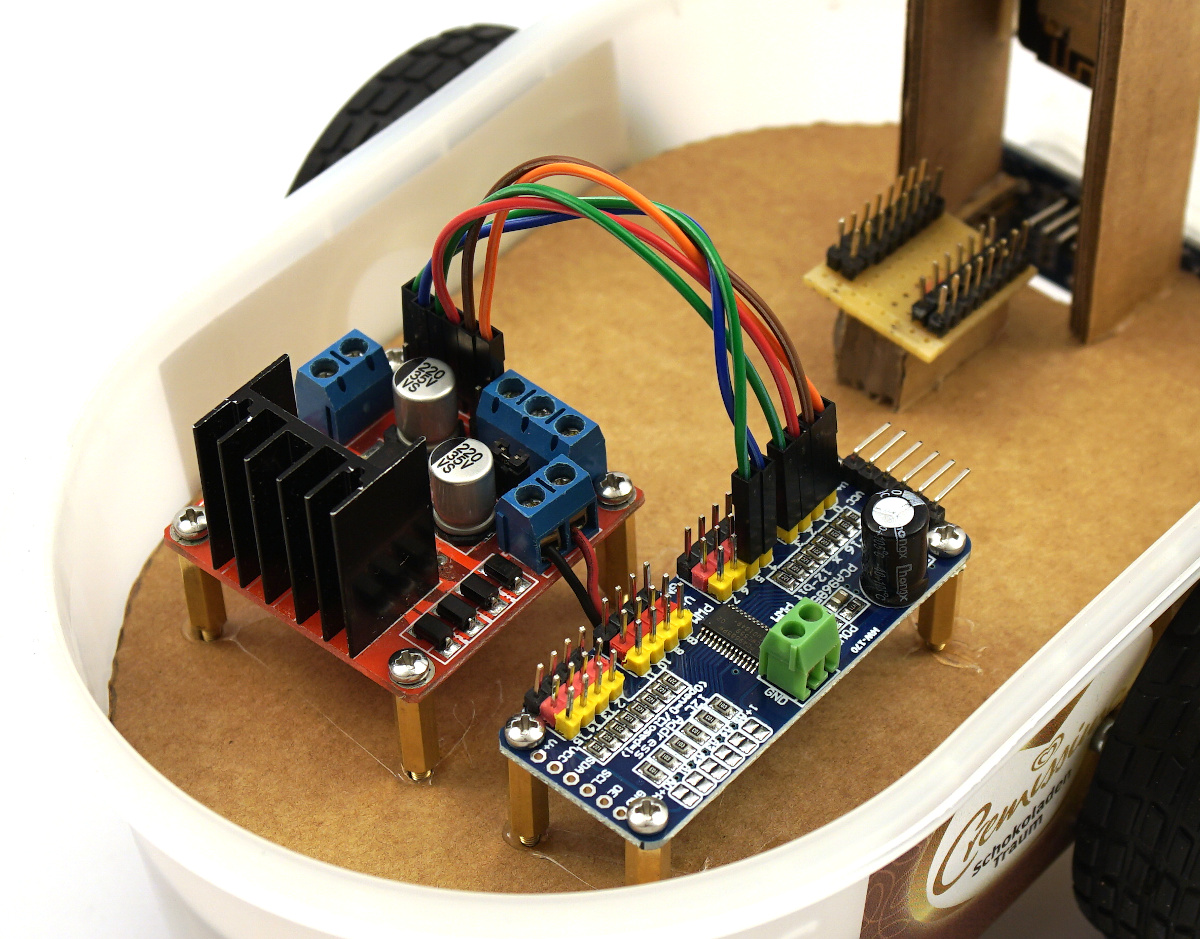
ESP32-CAM PCA9685 wires
Motoren am Motortreiber anschließen
Der linke Motor ist Motor 1, der rechte Motor ist Motor 2. Achte darauf, die Kabel farblich „gekreuzt“ anzuschließen, wenn sich die Motoren nicht synchron vorwärts drehen. So wird verhindert, dass sich das Roboter Auto im Kreis dreht.
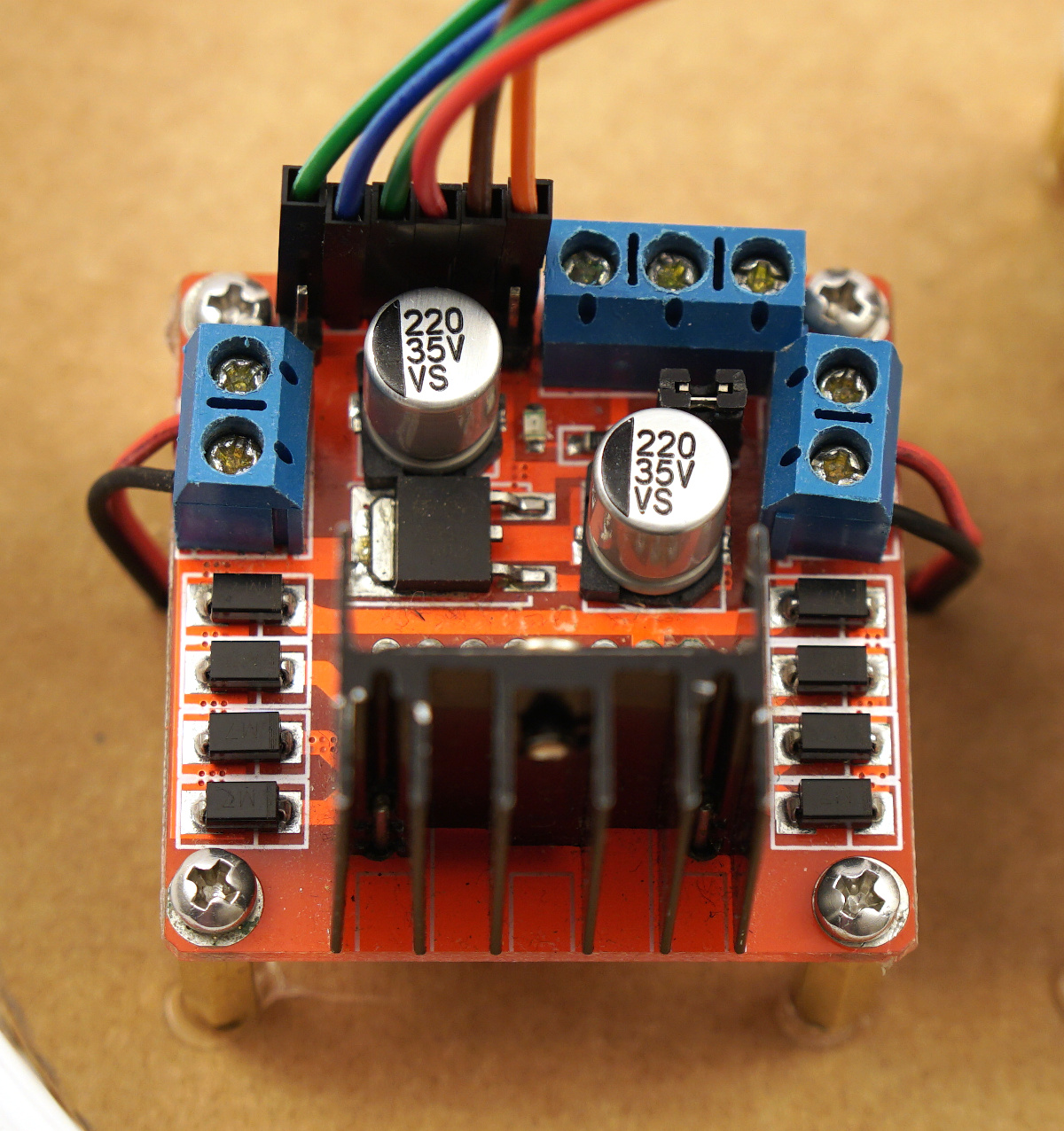
ESP32-CAM L298N H-Bridge wires
Stromversorgung anschließen
Für die Stromversorgung eignet sich hervorragend ein altes USB-Kabel. Dieses wird abgeschnitten, sodass nur noch das rote (+5V) und das schwarze (GND) Kabel genutzt werden. Die weißen und grünen Datenleitungen kannst du entfernen.
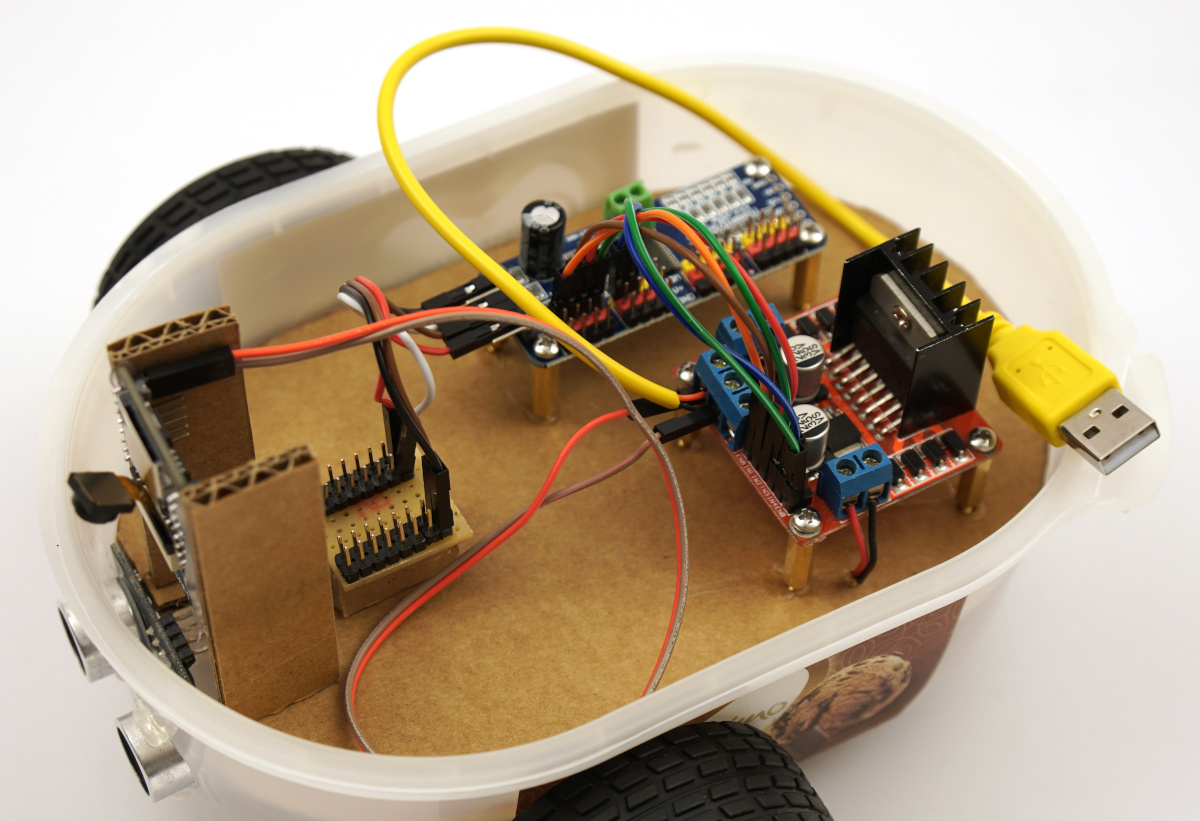
ESP32-CAM power supply USB wire
Alternative mit Step-Down Konverter
Kommt keine Power Bank zum Einsatz, brauchst du einen Step-Down Konverter. Dieser reduziert die ca. 7,2 V vom Batteriepack auf 5 V für den Betrieb der Elektronik.

Zusammenfassung
Die Verkabelung im ESP32-CAM Roboter Auto ist jetzt fast abgeschlossen. Es fehlt lediglich die I2C-Verbindung zwischen ESP32-CAM und I2C-Hub sowie die passende Steuerungssoftware. Im nächsten Artikel erfährst du, wie das ESP32-CAM Modul programmiert und mit der Steuerung ausgestattet wird.
Artikel Übersicht ESP32-CAM Roboter Auto:
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Projekt StartESP32-CAM Roboter Auto mit live Video Stream selber bauen - Entwicklungsumgebung einrichten
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - USB-Serial Adapter Verkabelung
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Live Video Streaming Software aufspielen
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Baue Dein Chassis
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Verkabelung allgemein
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Verkabelung des I²C Hubs
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Roboter Auto Beispielprogramme
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – WIFI Fernsteuerung programmieren
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – externe WIFI antenne anschließen
Meine persönliche Buchempfehlung:
Für alle die noch mehr Vorhaben mit ihrem Arduino oder Arduino Klonen wie dem ESP-32 Cam Modul kann ich das Buch "Arduino: Das umfassende Handbuch" von Dr. Claus Kühnel empfehlen. Es erklärt sehr viel im Bereich der Elektronik mit wirklich gutem Hintergrundwissen und vielen Details zu Sensoren, LEDs, Displays etc. die einem davor schützen unzählige Fehler zu machen. So spart man sich viel Frust, Zeit und Geld für neue Bauteile. Daher ist dieses Buch das ideale Nachschlagewerk für Einsteiger sowie erfahrene Bastler die gerne in einem Buch nachschlagen und auf Qualität setzen.











Recent Comments