


Das ESP32-CAM Roboter Chassis lässt sich besonders günstig aus Alltagsmaterialien bauen – zum Beispiel aus einer stabilen Eisverpackung. Dieses kreative Upcycling spart nicht nur Kosten, sondern macht das Projekt besonders nachhaltig. Im Gegensatz zu einem individuell gestalteten Chassis aus Pappe, das mehr handwerkliches Geschick erfordert, lässt sich eine Eisverpackung einfach verarbeiten – ganz ohne scharfe Werkzeuge.
Die Eisbox ist stabil genug, um alle elektronischen Komponenten unterzubringen und bei Fehlern leicht zu ersetzen. Das folgende Bild zeigt ein Roboter-Chassis aus einer Eiscremeverpackung:
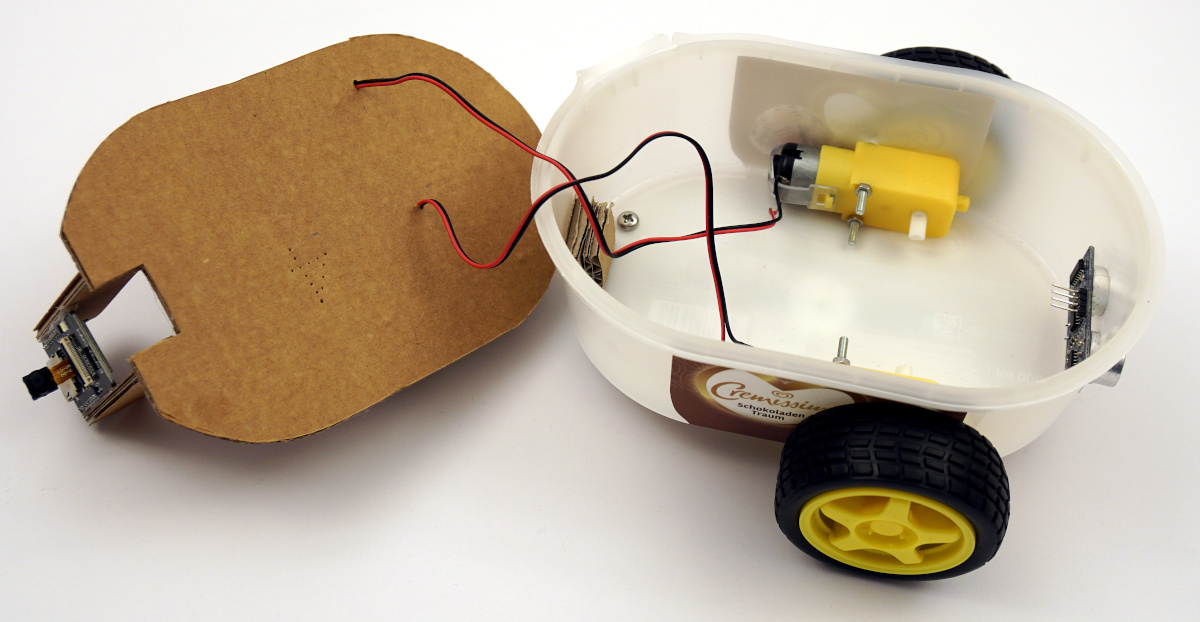
ESP32-CAM robot chassis
Motoren im Chassis befestigen
Die beiden DC-Getriebemotoren werden seitlich an der Eisverpackung mit M3-Schrauben befestigt. Achte darauf, dass die Kabelanschlüsse der Motoren in das Innere des Gehäuses zeigen. Zudem befindet sich auf einer Seite jedes Motors ein kleiner Kunststoffknubbel – hierfür muss ein zusätzliches Loch gebohrt werden, das die Stabilität beim Einbau erhöht.
Die Motoren sollten möglichst weit vorne im Gehäuse sitzen, nahe der Rundung der Box.

ESP8266 NodeMCU robot car dc motor mount
Benötigtes Werkzeug und Materialien
- 3 M3-Schrauben (je Motor, ca. 30 mm Länge)
- Kleiner Bohrer (3 mm und 3,5 mm)
- Bohrschablone aus Papier zur exakten Positionierung
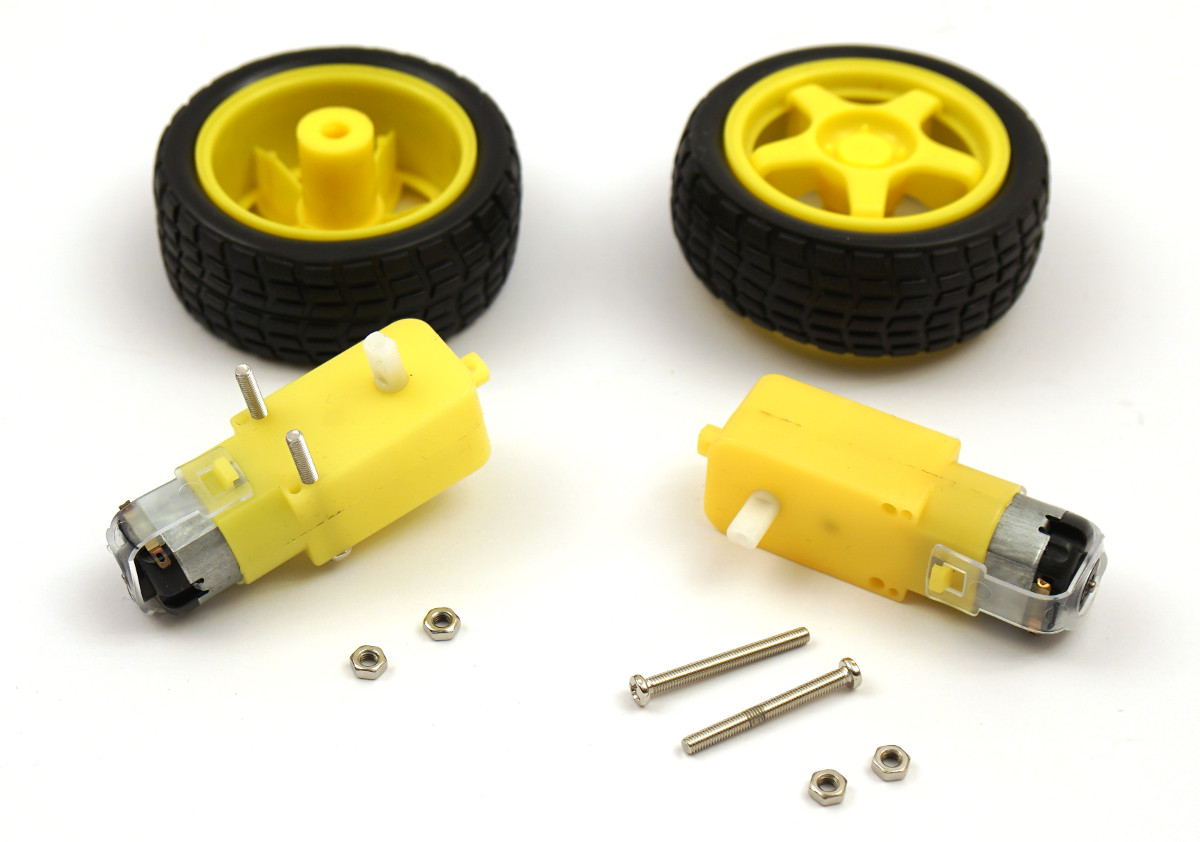
ESP8266 NodeMCU robot car dc motor screws
Kabel an den Motoren anlöten
Zuerst die Motoren aus dem Getriebegehäuse nehmen, um das Plastik nicht mit dem Lötkolben zu beschädigen. Danach je ein rotes und ein schwarzes Kabel anlöten. Anschließend die Motoren wieder einsetzen und mit der Befestigungsschlinge sichern. Danach lassen sie sich problemlos im Chassis montieren.

ESP8266 NodeMCU robot car dc motor mount final
ESP32-CAM mit Kamera montieren
Die Kamera sollte möglichst mittig vorne im Chassis befestigt werden. Es gibt zwei praktikable Optionen:
1. Direkt am Chassis
Ein passendes Loch wird in die Eisverpackung geschnitten, durch das die Kamera geschoben wird. Dabei sollte die Verbindung lösbar bleiben, damit man den Elektronikträger bei Bedarf leicht entnehmen kann.
2. Am Komponententräger
Ich habe mich dafür entschieden, das ESP32-CAM Modul direkt auf einem separaten Kartonträger zu befestigen. Das erleichtert Wartung und Ausbau der Komponenten deutlich.
ESP32-CAM chassis mount
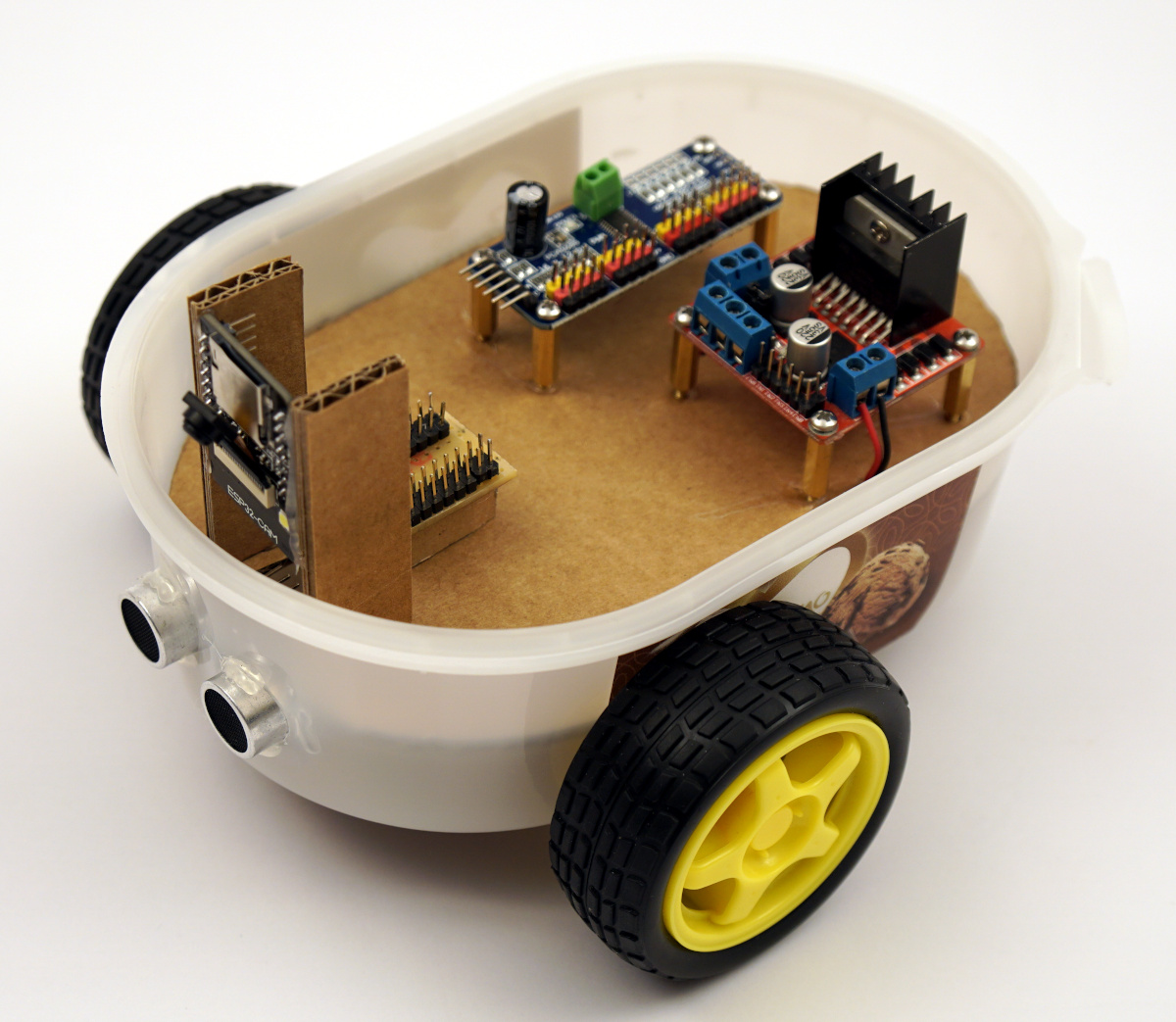
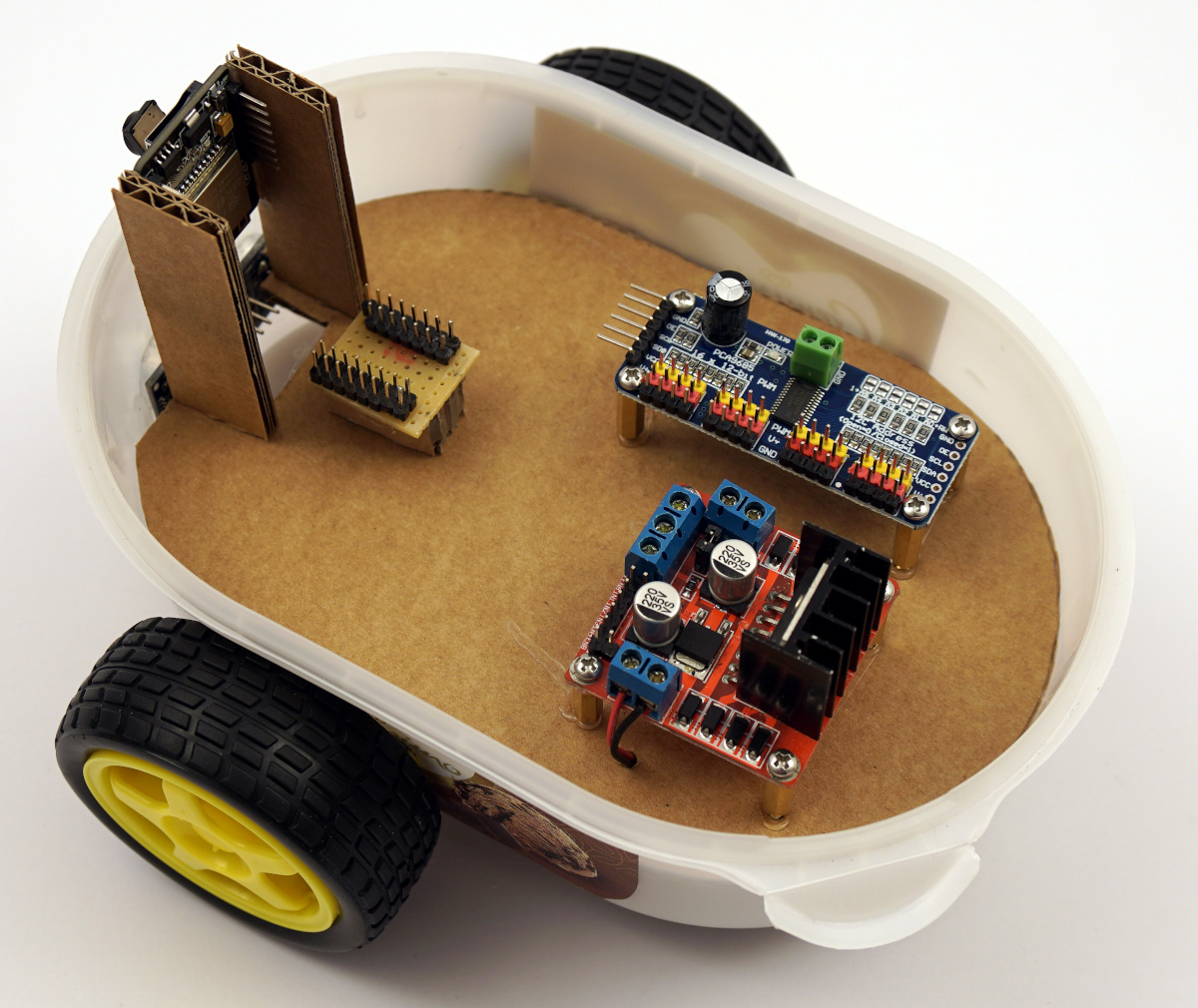
Elektronikträger bauen
Die restliche Elektronik (Motortreiber, Servo Kontroller, I2C-Hub etc.) wird auf ein Stück Pappe – dem sogenannten Komponententräger – geklebt oder geschraubt. Dieser liegt im Chassis auf den Motoren auf und wird hinten durch ein weiteres Stück Pappe gestützt, das exakt die gleiche Höhe wie die Motoren hat. So liegt der Träger stabil auf drei Punkten.
ESP32-CAM robot electronic components
Zusammenfassung
Mit der ESP32-CAM Roboter Chassis Bauanleitung aus einer einfachen Eisverpackung ist ein nachhaltiges und funktionales Chassis entstanden. Alle Komponenten haben ihren Platz gefunden und sind stabil montiert. Das Projekt zeigt, wie viel Spaß Technik und Upcycling zusammen machen können. Im nächsten Schritt folgt die Verkabelung der Elektronik.
Artikel Übersicht ESP32-CAM Roboter Auto:
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Projekt StartESP32-CAM Roboter Auto mit live Video Stream selber bauen - Entwicklungsumgebung einrichten
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - USB-Serial Adapter Verkabelung
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Live Video Streaming Software aufspielen
ESP32-CAM Roboter Auto mit live Video Stream selber bauen - Baue Dein Chassis
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Verkabelung allgemein
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Verkabelung des I²C Hubs
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – Roboter Auto Beispielprogramme
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – WIFI Fernsteuerung programmieren
ESP32-CAM Roboter Auto mit live Video Stream selber bauen – externe WIFI antenne anschließen
Meine persönliche Buchempfehlung:
Für alle die noch mehr Vorhaben mit ihrem Arduino oder Arduino Klonen wie dem ESP-32 Cam Modul kann ich das Buch "Arduino: Das umfassende Handbuch" von Dr. Claus Kühnel empfehlen. Es erklärt sehr viel im Bereich der Elektronik mit wirklich gutem Hintergrundwissen und vielen Details zu Sensoren, LEDs, Displays etc. die einem davor schützen unzählige Fehler zu machen. So spart man sich viel Frust, Zeit und Geld für neue Bauteile. Daher ist dieses Buch das ideale Nachschlagewerk für Einsteiger sowie erfahrene Bastler die gerne in einem Buch nachschlagen und auf Qualität setzen.












Recent Comments