


Wenn dein Roboter-Auto bereits im NoPhone Modus fährt und alles soweit funktioniert, ist jetzt der perfekte Zeitpunkt, um die OpenBot App auf deinem Android-Smartphone zu installieren. Ich selbst habe die App auf einem Samsung Galaxy S8 installiert und mein Roboter-Auto damit autonom fahren lassen. Das hat erstaunlich gut funktioniert – auch wenn das Smartphone dabei ziemlich warm wurde und sich der Akku schnell leerte. Trotzdem bin ich begeistert, wie reibungslos alles funktioniert hat. Das Projekt macht mir wirklich große Freude.

OpenBot ready to run
OpenBot App auf Android installieren
Die Installation der OpenBot App auf meinem Android-Smartphone war unkompliziert. Ich habe die aktuelle Version direkt aus dem OpenBot GitHub Repository heruntergeladen und die Datei via USB-Kabel auf mein Smartphone übertragen. Nach der Installation musste ich nur der Quelle vertrauen – schon war die App einsatzbereit.
Funktionen der OpenBot App
Data Logger: Diese Funktion ist essenziell, wenn du das Roboter-Auto manuell steuerst (z. B. mit einem PS4-Controller) und Trainingsdaten aufzeichnen möchtest. Es stehen vier Optionen zur Verfügung:
- only_sensors: Nur Sensordaten werden gespeichert – ohne Bilder. Diese Option ist nur für spezielle Trainingszwecke geeignet.
- crop_img: Sensordaten plus niedrig aufgelöste Bilder (z. B. 120 x 160 Pixel). Ideal für das Training neuronaler Netze. Empfohlene Standard-Einstellung.
- preview_img: Speichert Sensordaten und Bilder in voller Auflösung. Eher für Videonachbearbeitung geeignet, nicht fürs Training.
- all_imgs: Sowohl niedrig- als auch hochauflösende Bilder plus Sensordaten. Hoher Speicherbedarf.
Die Datenaufzeichnung kann über den Schalter rechts oder den X-Button am PS4-Controller gestartet bzw. gestoppt werden.

OpenBot App Screenshot collect trainings data
USB-Verbindung
Die App erkennt die Verbindung mit dem Arduino automatisch, sofern die Baudrate korrekt auf 115200 eingestellt ist – wie in der Firmware. Über den Schieberegler kann die Verbindung auch manuell getrennt oder wiederhergestellt werden.
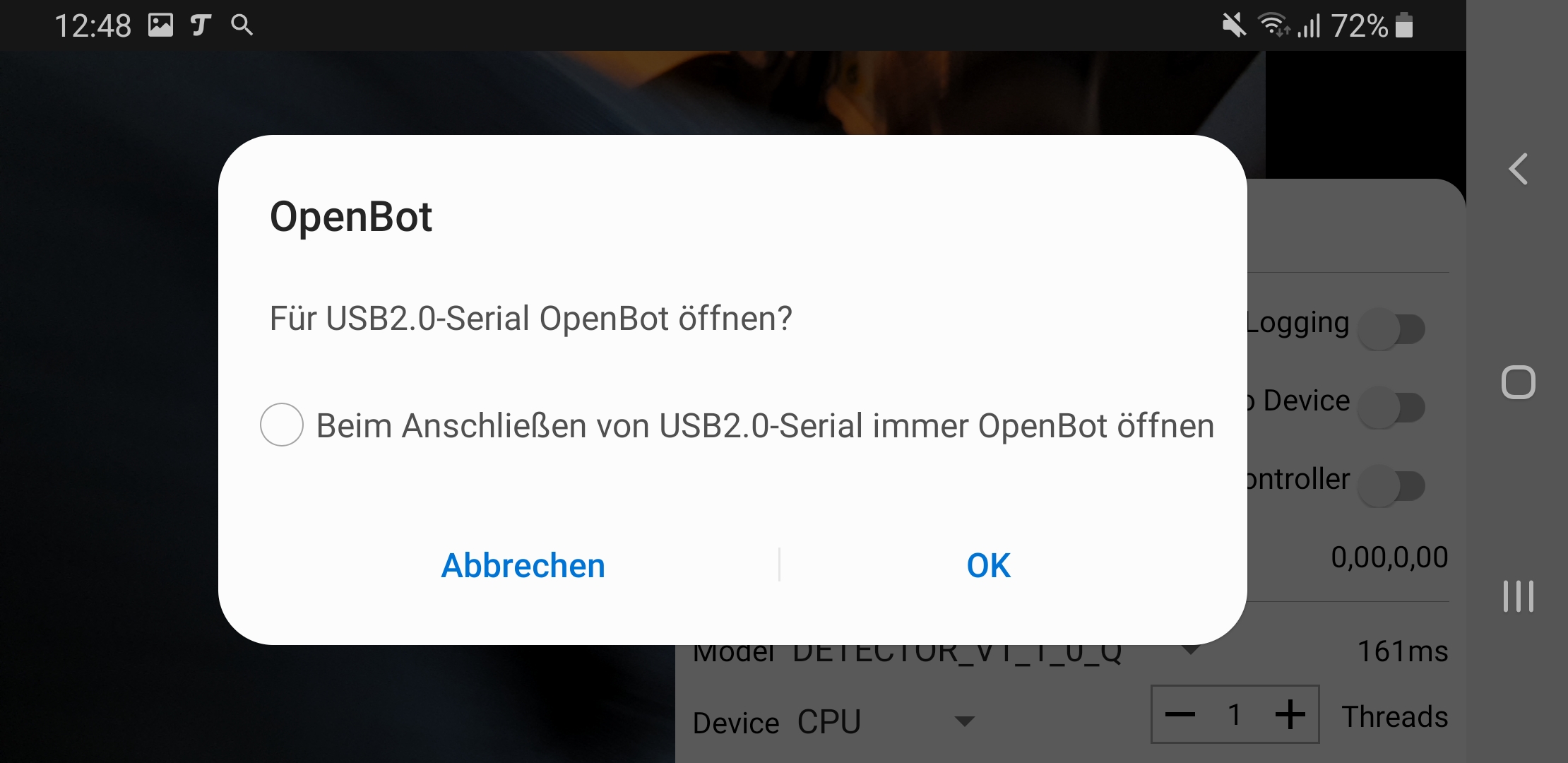
OpenBot App Screenshot USB message
Drive Mode
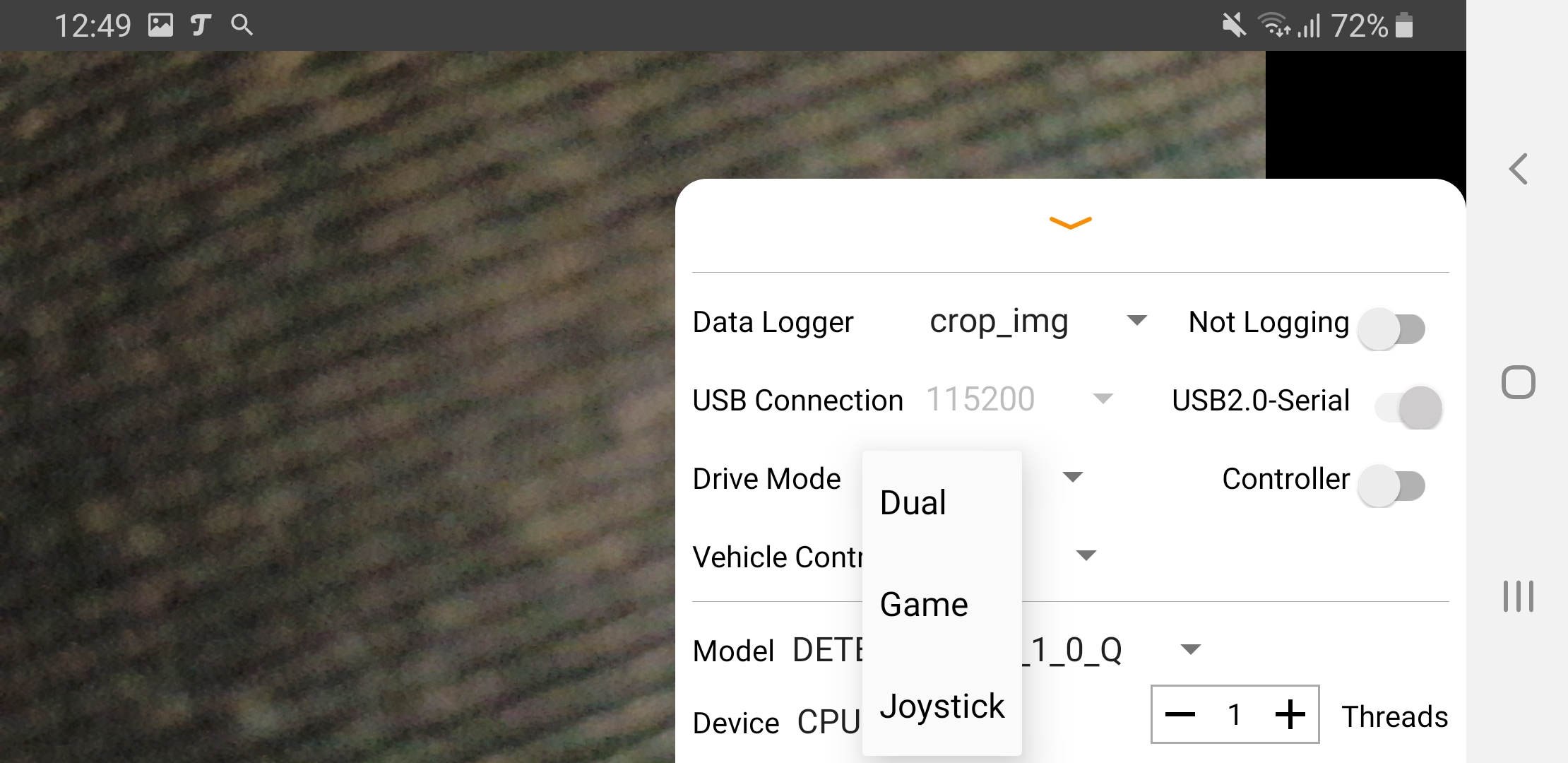
Drei Steuerungsmodi stehen zur Auswahl:
- Game Mode: Steuerung über R2/L2 + Joystick. Bekannt aus Rennspielen – für mich persönlich ungeeignet.
- Joystick: Steuerung mit einem Joystick. Gut kontrollierbar, allerdings manchmal abrupt bei Richtungswechseln.
- Dual: Unabhängige Steuerung der linken und rechten Motoren über beide Joysticks – ähnlich wie bei Kettenfahrzeugen.
Tipp: Mit dem Schalter rechts oder R1 am PS4-Controller wechselt man zwischen manueller Steuerung und der Steuerung durch das neuronale Netz.
OpenBot App Screenshot mode
Vehicle Control
Drei Geschwindigkeiten stehen zur Auswahl – geregelt über das PWM-Signal:
- Slow: 50 % PWM – langsames Fahren.
- Normal: 75 % PWM – moderat schnell.
- Fast: 100 % PWM – maximale Leistung. Standard beim autonomen Fahren mit dem neuronalen Netz.
Neuronales Netz (Model)
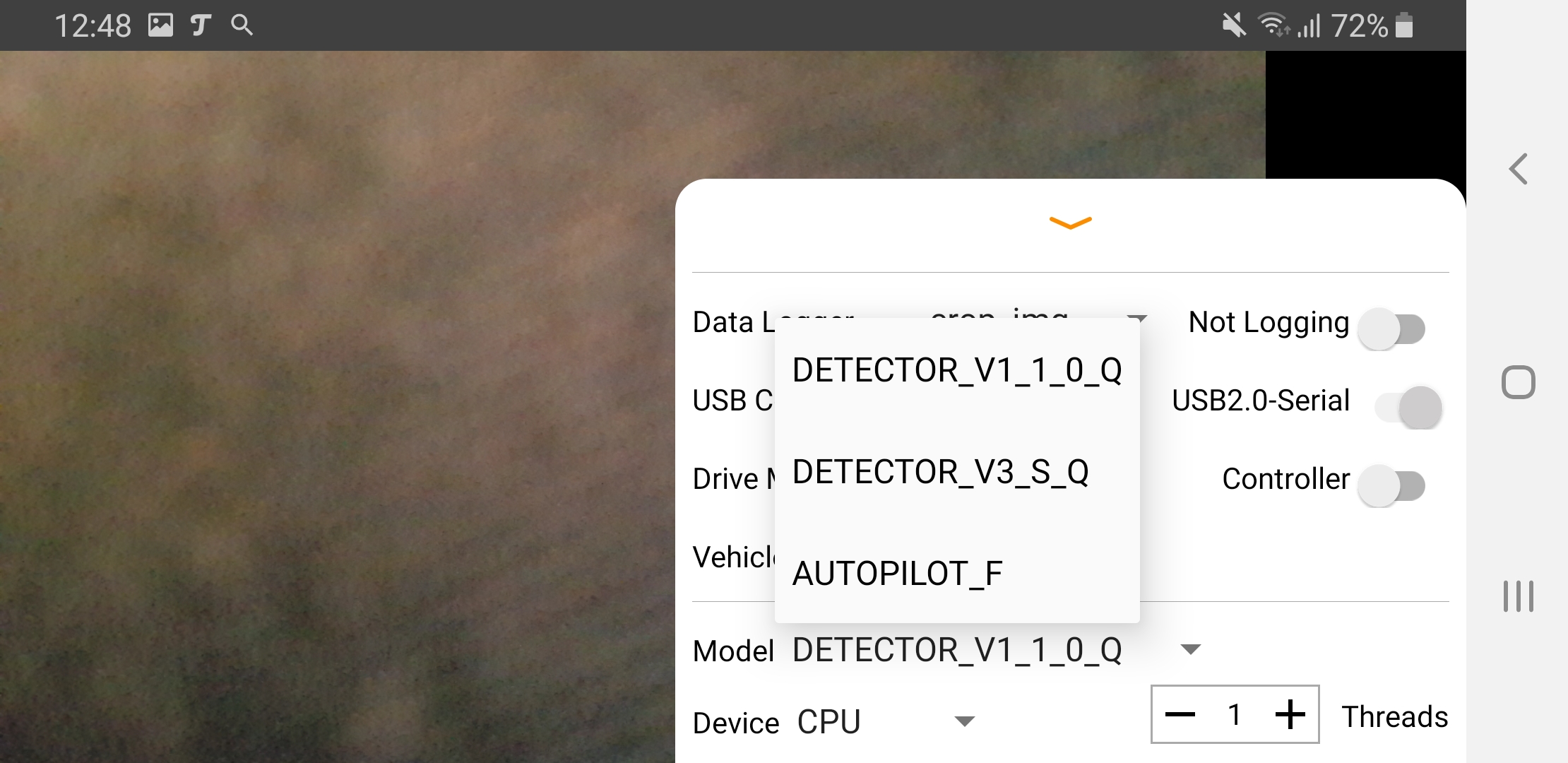
Folgende vortrainierte Modelle stehen zur Verfügung:
- DETECTOR_V1_1_0_Q: Basierend auf MobileNet V1 – Personenverfolgung.
- DETECTOR_V3_S_Q: Basierend auf MobileNet V3 – ebenfalls zur Personenverfolgung.
- AUTOPILOT_F: Ermöglicht autonomes Fahren – sehr beeindruckend, auch in Innenräumen. Wer selbst ein Modell trainieren will, findet hier Infos: Driving Policy.
OpenBot App Screenshot neural network model
Device-Auswahl
In der App kann man wählen, ob das neuronale Netz auf CPU oder GPU ausgeführt wird. Beim Galaxy S8 blieb mir nur die CPU-Option.
PS4 Controller koppeln
Drücke gleichzeitig SHARE und den Playstation-Button, bis der Controller schnell blinkt. Dann unter den Bluetooth-Geräten am Smartphone verbinden. Damit kannst du das Roboter-Auto manuell über die App steuern – ideal für die Datenerfassung.

OpenBot ready to run PS4 controller
Autonomes Fahren mit OpenBot
Nachdem du die App nun kennst, kannst du dein Roboter-Auto mit den vortrainierten neuronalen Netzen autonom fahren lassen. Besonders gut funktionieren die Modelle zur Personenverfolgung, wenn die Smartphone-Kamera leicht nach oben geneigt ist (ca. 5–10°). Dadurch wird weniger Boden erfasst und mehr vom Umfeld, was dem Netz bessere Daten liefert.
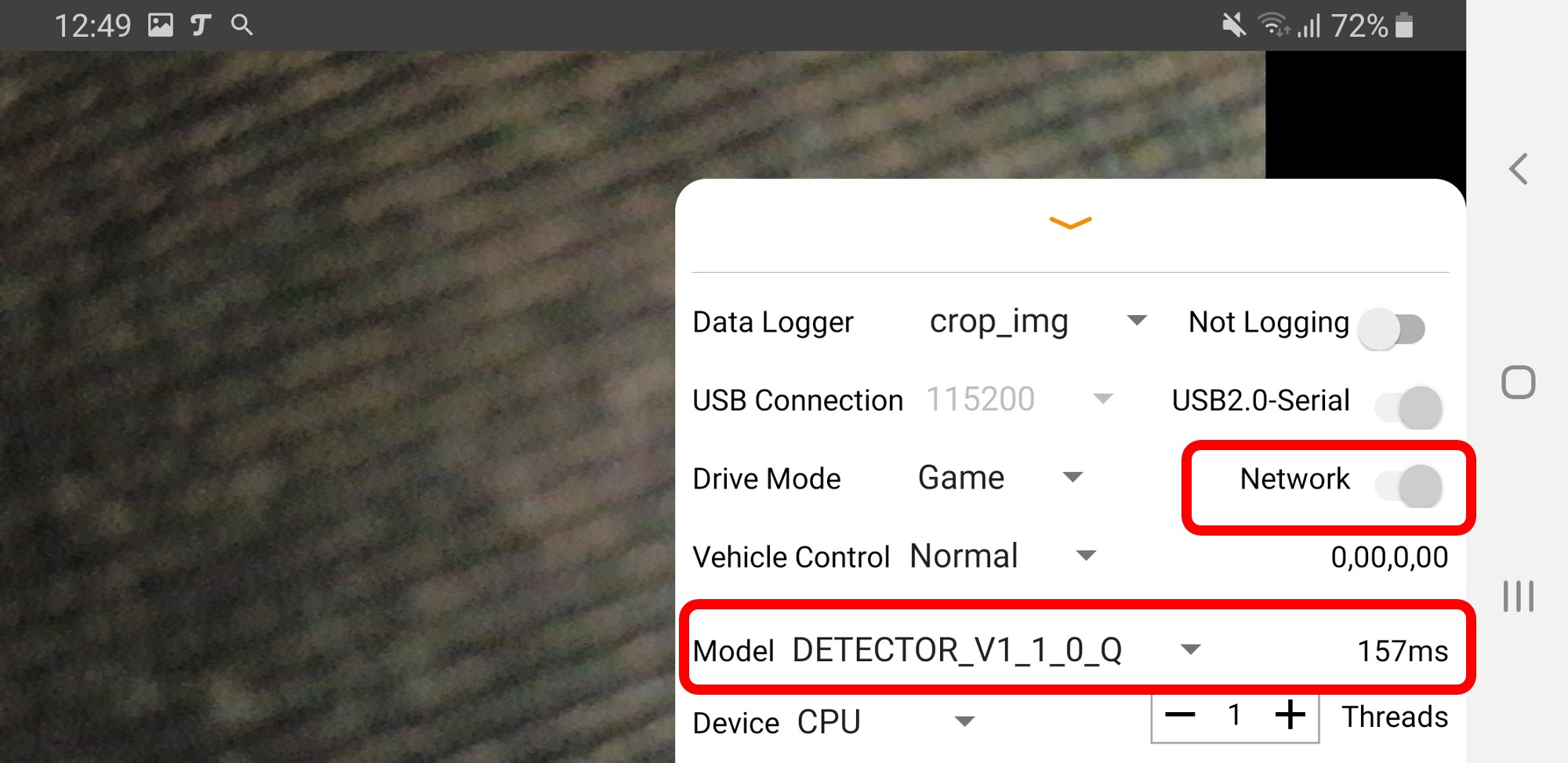
OpenBot App Screenshot active neural network
Fazit
Mit der OpenBot App und etwas Vorbereitung kannst du dein Roboter-Auto vollständig autonom fahren lassen – direkt über dein Smartphone. Die App ist übersichtlich, leistungsfähig und besonders für Einsteiger bestens geeignet. Im nächsten Beitrag zeige ich dir, wie du eigene Trainingsdaten sammelst und ein neuronales Netz selbst trainierst.












Recent Comments