


Bevor dein OpenBot Roboter-Auto vollständig autonom fahren kann, muss die Arduino Entwicklungsumgebung eingerichtet werden. Erst dann lässt sich die passende Firmware auf den Arduino Nano hochladen, die unter anderem die Steuerung der Motoren übernimmt. In diesem Beitrag erkläre ich dir Schritt für Schritt, wie du die benötigte Software installierst, die Bibliotheken einrichtest und die OpenBot Firmware aufspielst. Ich gehe dabei von einem Windows-PC aus – aber die Anleitung funktioniert ebenso auf Mac oder Linux.
Arduino IDE installieren
Die Arduino IDE (Integrated Development Environment) ist kostenlos und leicht zu bedienen. Ich habe für meine Anleitung die Version 1.8.12 auf einem Windows 10 Rechner verwendet.
Download: Arduino IDE (klicke auf „Just Download“, wenn du keine Spende machen möchtest)
Nach der Installation kann es direkt mit der Einrichtung der zusätzlichen Bibliotheken weitergehen.
Benötigte Bibliotheken installieren
Für OpenBot werden drei wichtige Bibliotheken benötigt:
- NewPing
- Adafruit SSD1306
- Adafruit GFX
Die Installation läuft bei allen Bibliotheken gleich ab. Ich erkläre es am Beispiel von NewPing:
- Öffne die Arduino IDE.
- Gehe auf Werkzeuge → Bibliotheksverwalter.
- Gib in das Suchfeld „NewPing“ ein und installiere die Bibliothek.
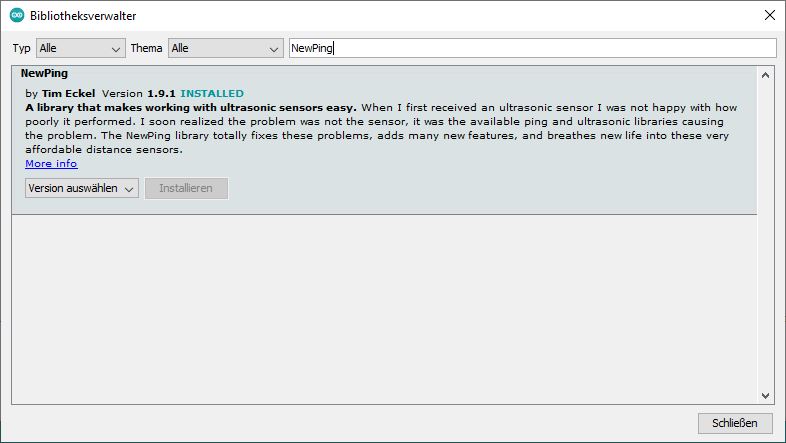
NewPing library
Wiederhole den Vorgang auch für „Adafruit SSD1306“ und „Adafruit GFX“.
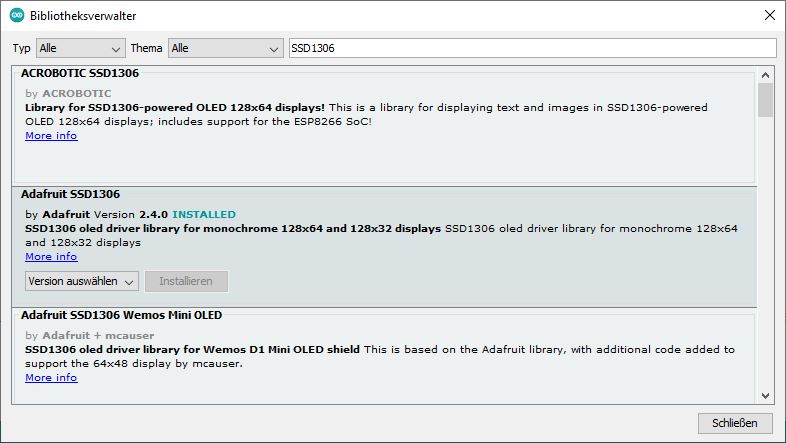
Adafruit SSD1306
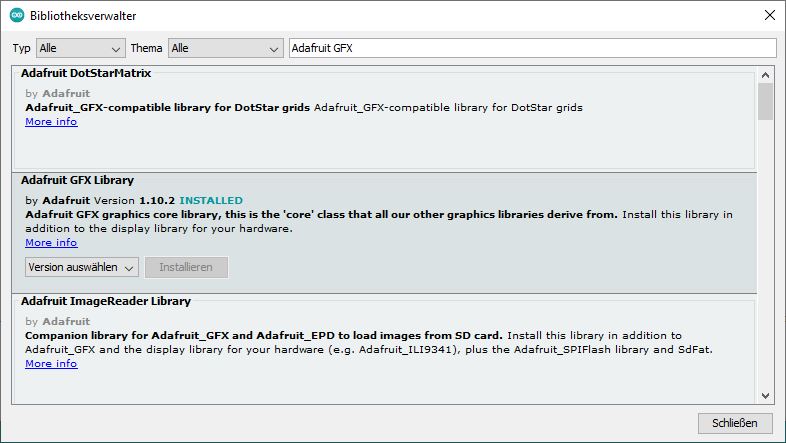
Adafruit GFX
Firmware vorbereiten und Board konfigurieren
Bevor die Firmware übertragen werden kann, musst du das richtige Board und die korrekten Einstellungen in der Arduino IDE vornehmen:
Werkzeuge → Board → Arduino AVR Boards → Arduino NanoWerkzeuge → Prozessor → ATmega328P (Old Bootloader)Werkzeuge → Port → *Den richtigen COM-Port auswählen*
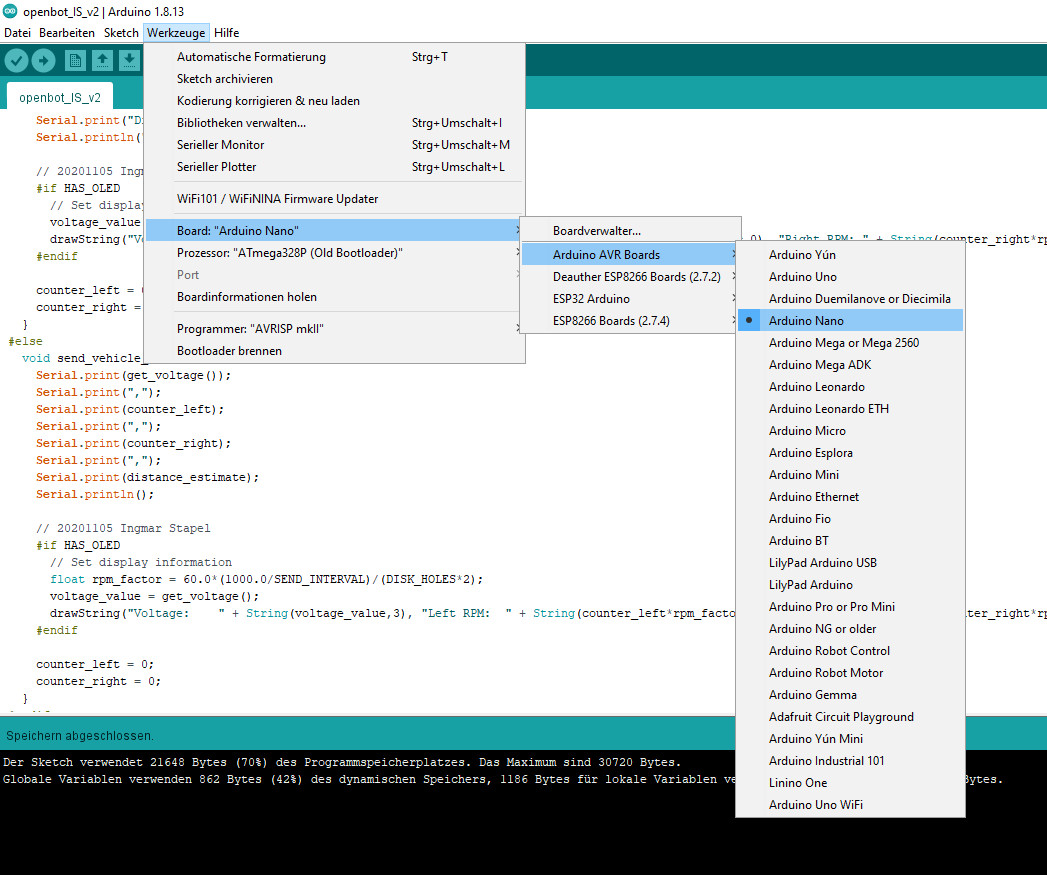
Arduino IDE config
Firmware herunterladen und anpassen
Die passende Firmware findest du auf GitHub:
Nach dem Download öffnest du die .ino-Datei mit der Arduino IDE. Nun musst du einige Optionen in der Firmware anpassen:
#define OPENBOT DIY: Aktivieren, wenn du OpenBot selbst aufgebaut hast (nicht mit PCB).#define NO_PHONE_MODE 1: Ermöglicht den Start ohne angeschlossenes Smartphone.#define HAS_SONAR 1: Falls ein Ultraschallsensor verwendet wird.
Firmware hochladen
Jetzt kann die Firmware über das USB-Kabel auf den Arduino Nano geladen werden. Klicke dafür auf den Upload-Button (Pfeil nach rechts oben):
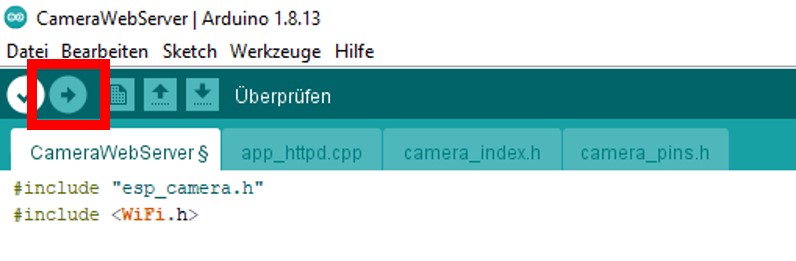
ESP32-CAM Arduino IDE Upload
Nach erfolgreichem Upload ist der Arduino Nano betriebsbereit.
Zusammenfassung
Die Einrichtung der Arduino Entwicklungsumgebung für OpenBot ist dank der klar strukturierten IDE und der verfügbaren Bibliotheken einfach umzusetzen. Die Installation verlief bei mir reibungslos, und mein Roboter-Auto fuhr direkt nach dem ersten Upload los. Im nächsten Artikel geht es darum, wie die neuronalen Netze in der App aktiviert und genutzt werden, um dein Auto vollständig autonom fahren zu lassen.












Moin,
eine Frage habe ich zu dem Anzeigedisplay.
bei mir wird auf dem Display nichts angezeig.
wenn bei HAS-OLED von 0 auf 1 setze, dann passiert garnix mehr – das auto fährt nicht mehr.
kann sein, dass da die richtige Treiber für den Display fehlen, denn es kann auch ein anderer Chip verbaut z.b. ssh1106 und nicht ssd1306.
und da benötige ich hilfe.
welche treiber muss ich dann laden?
und was muss ich im sketch ändern damit es funktioniert.
wäre sehr dankbar wenn Sie da weiter helfen würden.
MfG
W.B.