


Roboter Fahrzeuge kennen grundsätzliche unterschiedliche Antriebe für die Fortbewegung. Ich habe einen Roboter mit speziellen Mecanum Rädern aufgebaut. Mit Mecanum Rädern ausgestattet Roboter können sich in alle Richtungen bewegen. Mit diesen Rädern kann solch ein Fahrzeug z. B. seitwärts und diagonal oder klassisch vorwärts, rückwärts, im Kreis oder Kurven fahren. Damit das möglich ist, müssen die vier Motoren separat angesteuert werden. Für die Ansteuerung kommt in meinem Roboter wieder ein Raspberry Pi Computer zum Einsatz. Die notwendigen Python Programme habe ich selber geschrieben.
Für die separate Ansteuerung der vier Motoren verwende ich zwei Motortreiber vom Typ L298 N in meinem Modell Auto. So ist es mir möglich jeden Motor getrennt mit dem Raspberry Pi und meinem Pyhton-Programm anzusteuern. Auf dem folgenden Bild ist der Roboter mit den beiden Motortreibern links im Heck des Roboters zu sehen.
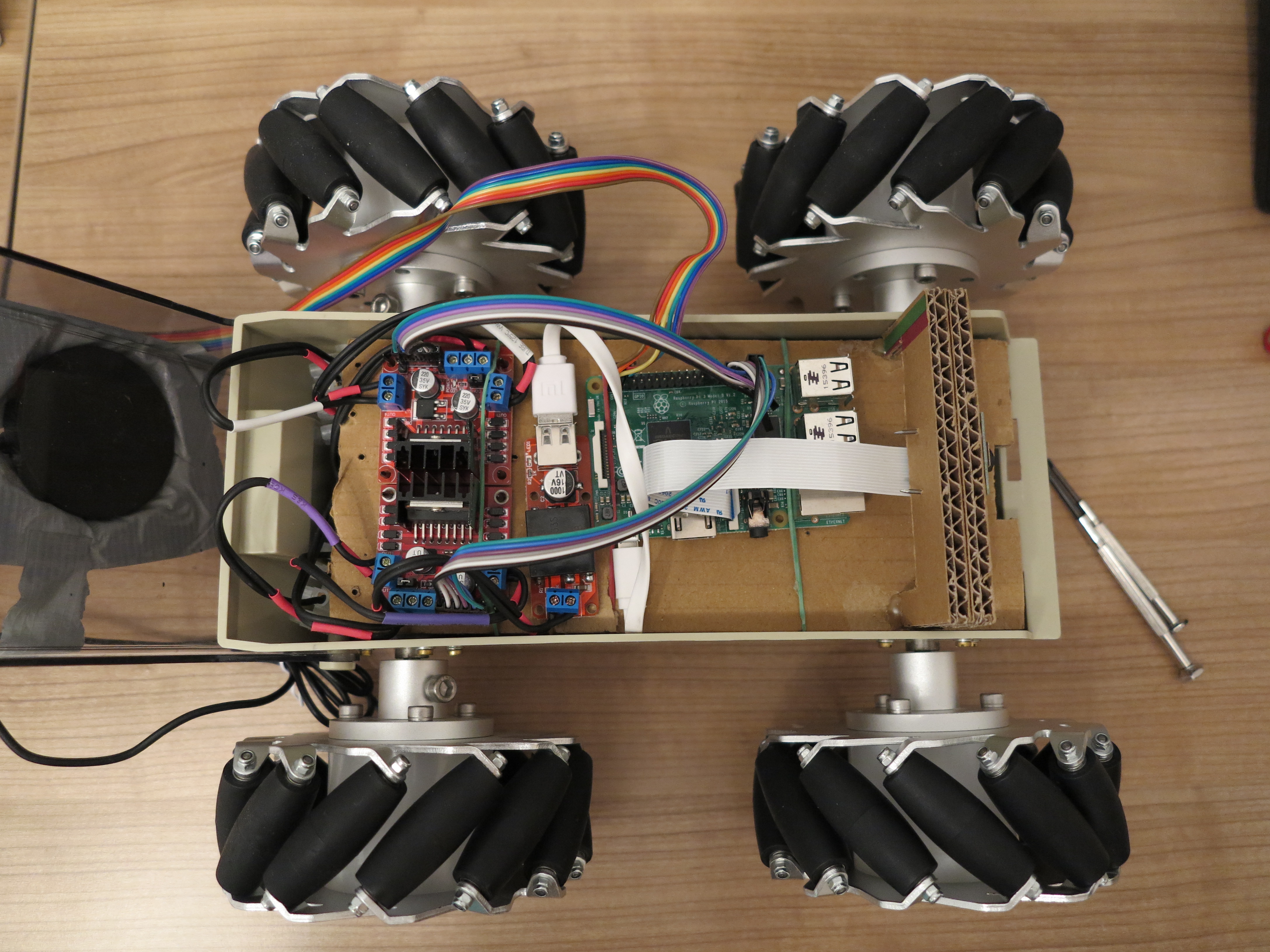
Raspberry Pi Robot Mecanum Wheels
[DE_BOOK_DETAIL DE_BOOK_DETAIL=“DE_BOOK_DETAIL“]
Steuerung Mecanum Raspberry Pi Roboter
Für die Steuerung habe ich zwei Python Programme geschrieben. Das erste übernimmt die Ansteuerung der beiden Motortreiber des Roboters. Das zweite Programm nimmt die Steuerbefehle des Anwenders entgegen für die Steuerung der Richtung und Geschwindigkeit des Roboter-Autos. Beide Programme zusammen ermöglichen das Steuern des Bots.
Schwierig ist die manuelle Steuerung für die Fälle wenn das Fahrzeug z. B. von einer Kurvenfahrt in eine seitliche Bewegung wechseln soll. Hier muss einmal der Mensch die Steuerung entsprechend ändern und die Software muss den Übergang von der Kurvenfahrt hin zu einer seitlichen weiterfahrt übernehmen. Das schöne ist aber das dazu keine Mechanik am Bot selber geändert werden muss sondern alles digital abgebildet werden kann.
Wer gerne mal einen Blick in das Programm werfen möchte kann es hier herunter laden.
Download: python_program_mecanum_robot
Video Mecanum Roboter
Das Video zeigt die ersten Versuche von mir das Fahrzeug auch seitwärts fahren zu lassen. Das ist gar nicht so einfach möglich wenn man die Steuerung mauell über eine Tastatur macht. Daher nicht wundern wenn das Ergebnis noch nicht perfekt aussieht.

Raspberry Pi Roboter-Auto Komponentenliste
Wenn ich jetzt das Interesse wecken konnte am Bau eines Roboters zusammen mit einem Raspberry Pi der findet auf meinem Blog eine Komponentenliste. Diese Komponentenliste listet die elektronischen Komponenten oder fertigen Raspberry Pi Bausätze auf die ich selber mit gutem Gewissen weiterempfehlen kann. Die meisten aufgezählten Komponenten kommen in meinen Modellen zum Einsatz und wurden so durch mich auf Funktion und Kompatibilität mit dem Raspberry Pi hin geprüft.
Hier der Link auf die Komponentenliste: Komponentenliste

ZeroBorg motor controller - robot-car components
Zusammenfassung
Die Mecanum Rädern sehen nicht nur besonders interessant aus, sie ermöglichen auch Fahrmanöver die mit normalen Rädern nicht möglich sind. Die Steuerung für den Roboter zu entwickeln war nicht ganz so einfach. Nach ein paar Überlegungen und wie die Steuerung am besten abgebildet werden kann ging es dann auch schon los. Jetzt nach ein paar Übungsrunden macht das fahren mit dem Roboter richtig Spaß.












Sehr cooles Projekt, die Räder sind klasse!
Mich würde noch interessieren, welche Motoren du verwendest hast. Könntest du dazu einen Link posten?
Hi Timo,
ich habe einen Amazon Link zu den Motoren eingefügt. Ich habe diese Motoren gewählt da sie sehr klein sind und sich gut in der Diskettenbox die ich als Chassis verwende einbauen ließen.
Wichtig ist, dass Du auf den Durchmesser der Antriebswelle achtest und das sich die Räder auch auf dieser montieren lassen.
Allerdings haben diese Motoren nicht viel Kraft und funktionieren mit den Mecanum Rädern zusammen sehr gut. Ich hatte auch schon aus dem Modellbau Räder mit Gummiprofil montiert und da fällt es dem Roboter schwer mit diesen Motoren sich zu drehen.
Viele Grüße,
Maker
Sehr cool, habe das Basis Design bereits fertig, tue mich aber mit der Software schwer. Ich habe zwar das Buch gelesen und auch den Grundgedanken der Steuerung verstanden, scheitere aber daran das ganze mit einem xbox Controller zur Steuerung zu versehen. Evtl. haben Sie ja noch ein paar Tips was man beachten muss? Alternativ könnte ich mir ein Chassis aus makeblock komponenten und eine Steuerungskombi Raspi und MegaPi vorstellen. Mal schauen was ich hin bekomme 🙂 Ich nutze übrigens diese Räder (https://www.amazon.de/dp/B07MDX2XV1/ref=cm_sw_em_r_mt_dp_U_kKkPCbCFATHKM ) und selbstgedruckte Hex Schäfte um sie mit den Motoren zu verbinden