


Für den OpenBot Chassis Bau habe ich mich bewusst für das 4WD Smart Car Chassis entschieden und gegen den 3D-Druck. Der Grund ist einfach: Ich besitze keinen 3D-Drucker und konnte mit dem Acrylglas-Chassis bereits in mehreren Projekten sehr gute Erfahrungen sammeln. Diese Lösung ist nicht nur günstiger, sondern lässt sich auch leicht auf Pappe übertragen – so entstehen kreative Eigenlösungen mit einfachen Mitteln.
Das folgende Bild zeigt die Hauptkomponenten: zwei Acrylglasplatten, vier Getriebemotoren mit Rädern, Arduino Nano, L298N-Motortreiber, einen Ultraschallsensor sowie Schrauben und Abstandshalter aus dem Lieferumfang. Zusätzlich wird eine stabile Pappe – zum Beispiel aus einer sauberen Gemüsekiste – benötigt.

OpenBot chassis build 4WD Smart Car
4WD Chassis zusammenbauen
Zu Beginn werden die Stromkabel an die vier Getriebemotoren gelötet. Es erleichtert die Arbeit, wenn die Motoren zuvor aus ihren Gehäusen genommen werden – so bleibt das Kunststoffgehäuse unversehrt.
Die Schutzfolie der Acrylglasplatten lässt sich gut entfernen, wenn man sie vorher mit einem Föhn erwärmt. Anschließend werden die Motoren mit den beiliegenden Haltern auf einer der Platten montiert. Arduino Nano und Motortreiber lassen sich ideal mit Kabelbindern befestigen – alternativ später auf einer Pappkonstruktion.
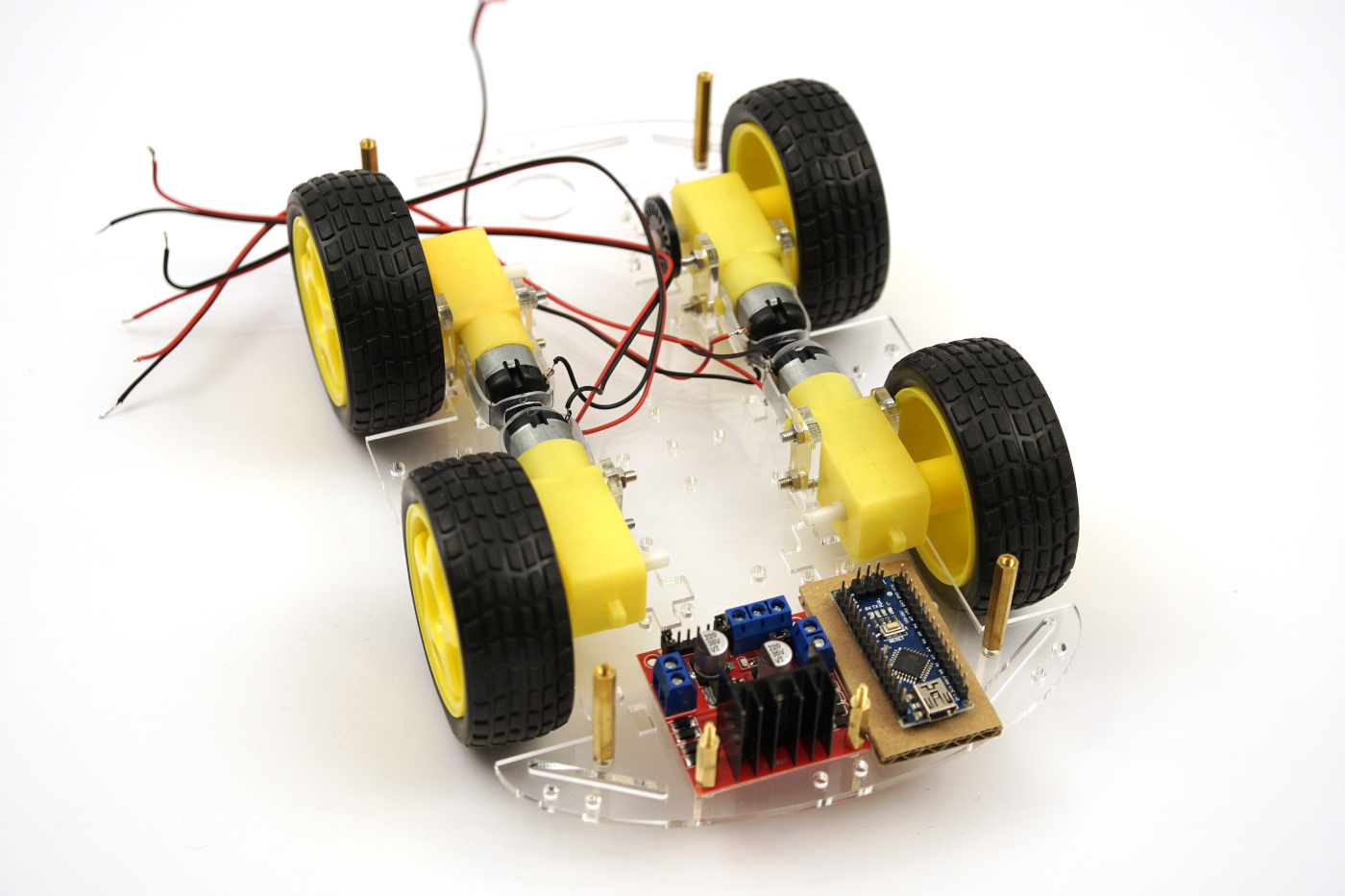
OpenBot chassis build DC gear motors and electronics
Testaufbau und kreative Erweiterungen
Im nächsten Schritt habe ich zwei Akku-Optionen getestet – leider erwies sich die Powerbank als ungeeignet. Auf dem Bild ist die zentrale 5V-Stromverteilerplatine gut zu erkennen, die ich aus einer Lochrasterplatine und einer Stiftleiste gebaut habe – montiert auf einem Stück Pappe.
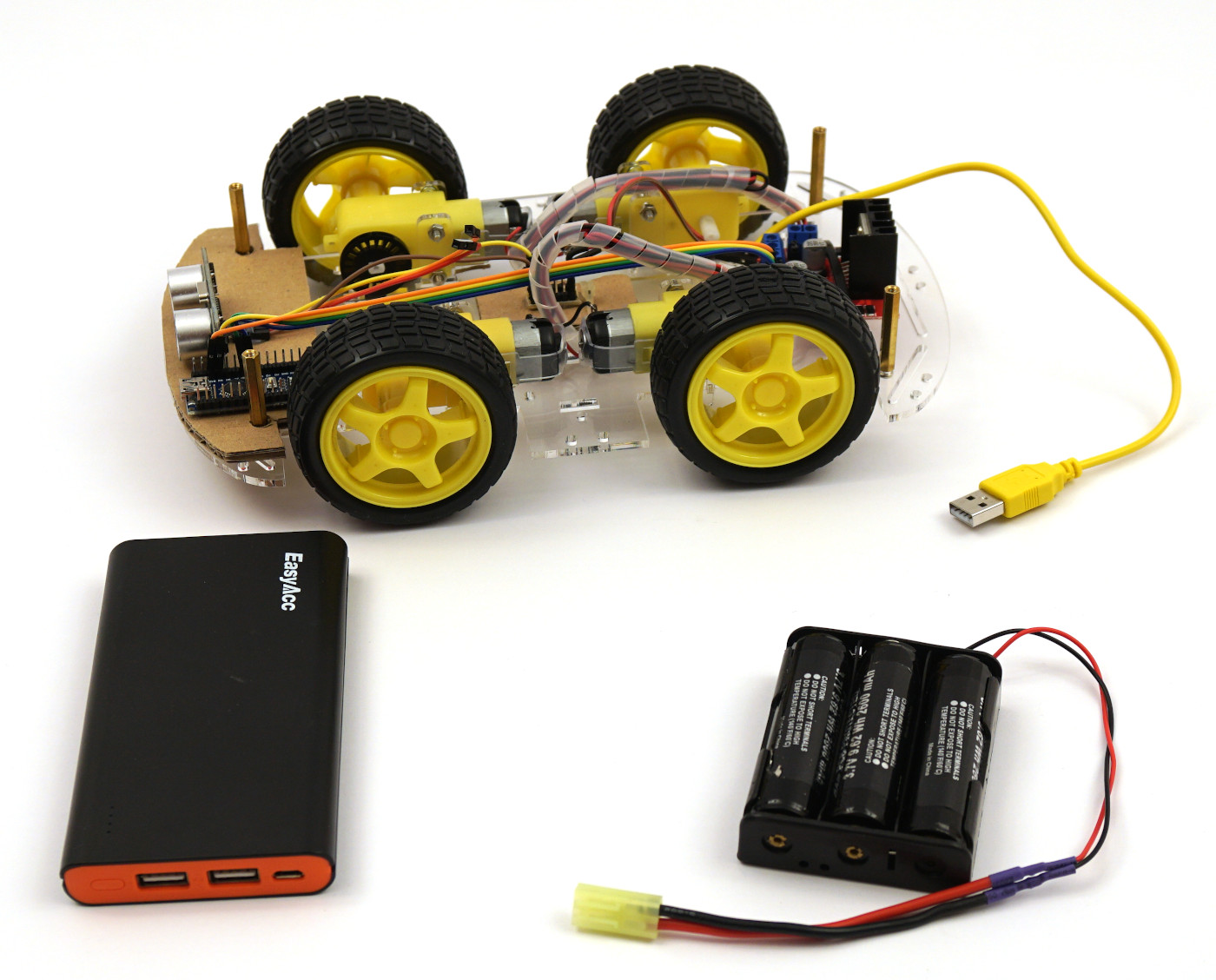
OpenBot chassis build electronics
Um Platz zu sparen, habe ich beim Motortreiber die Lötpunkte auf der Rückseite flach abgefeilt, wie auf dem folgenden Vergleichsbild zu sehen ist:
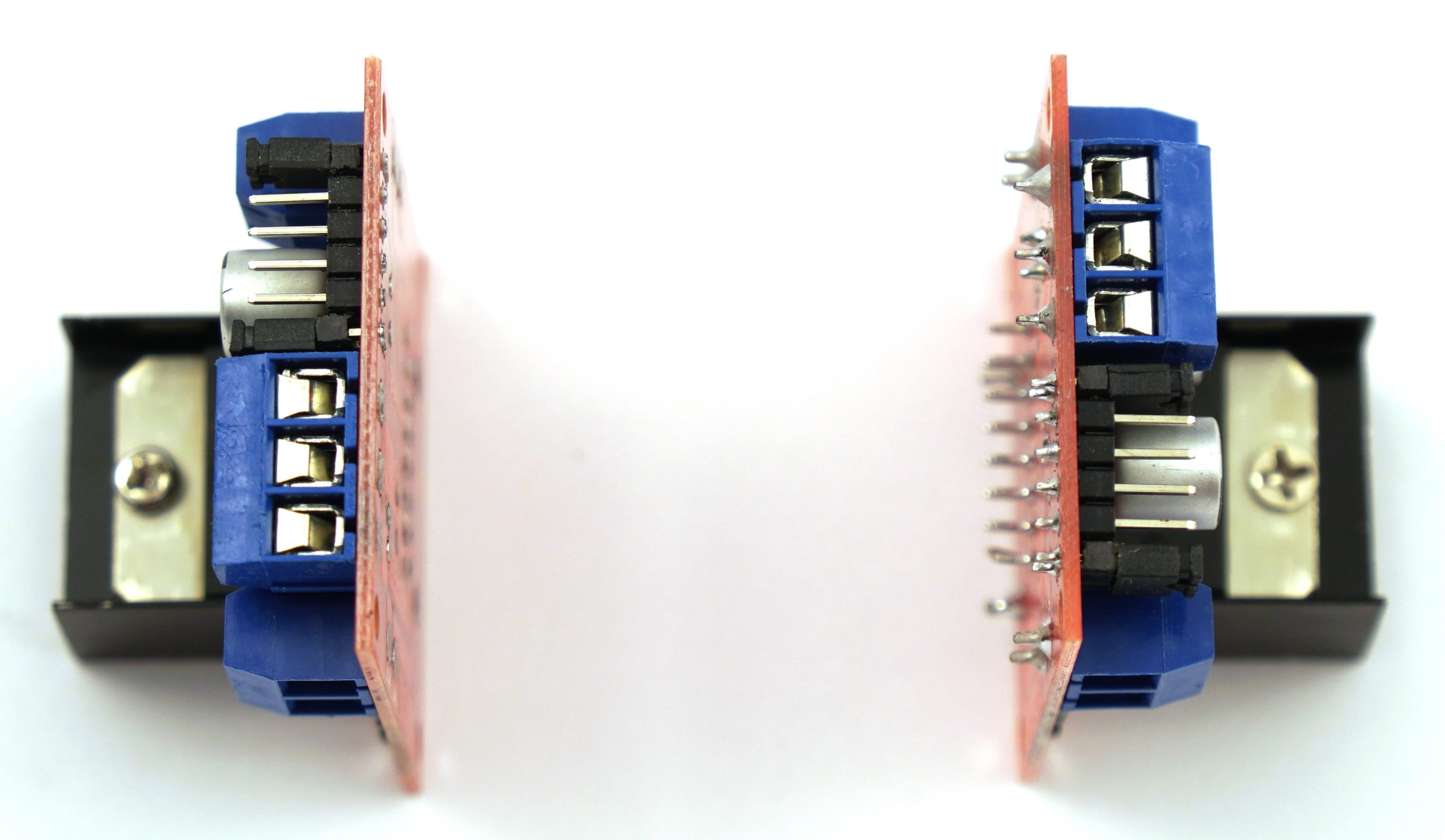
OpenBot chassis build L298 H-Bridge modified
Aufbau mit Pappe
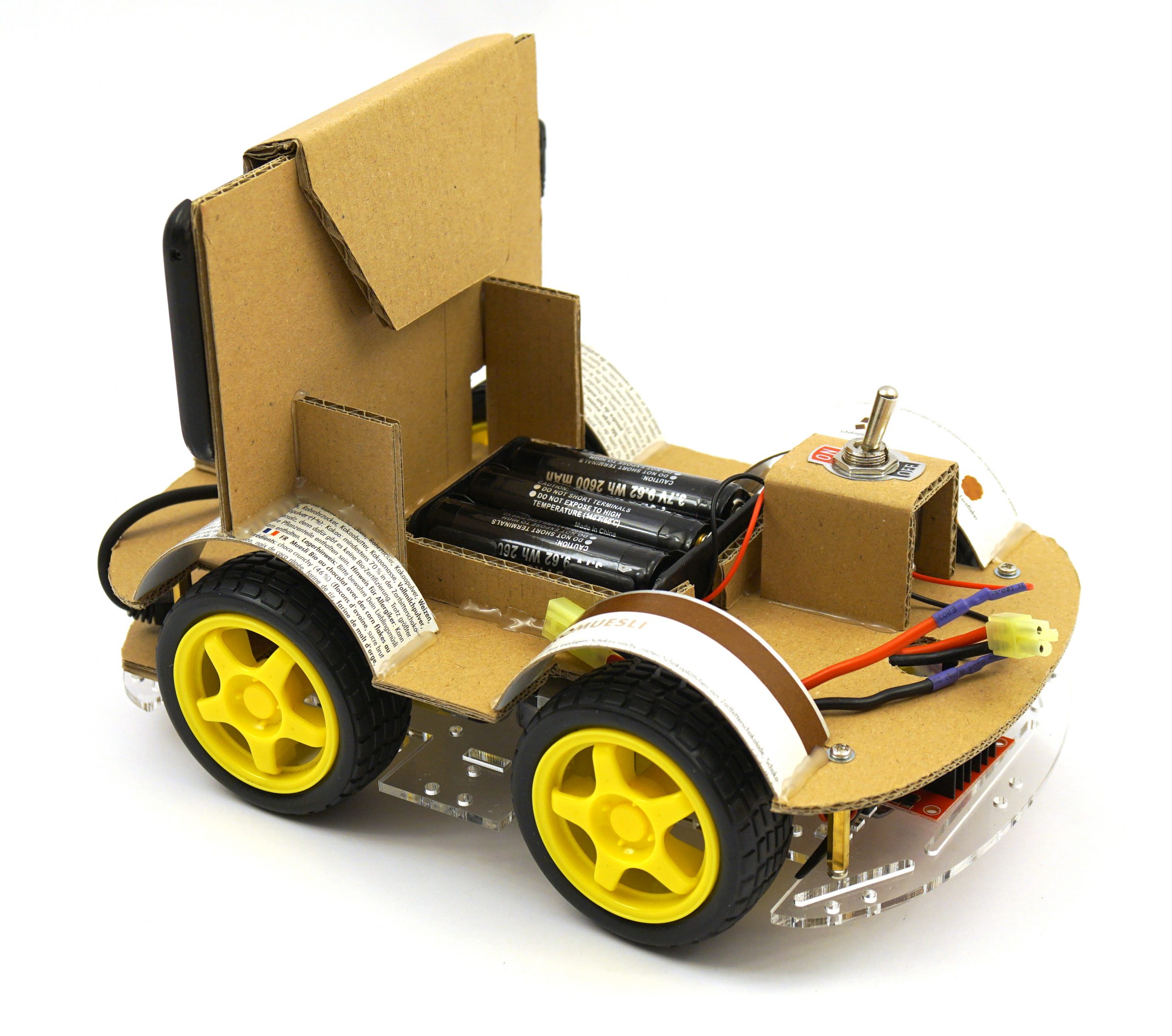
Die zweite Acrylplatte diente mir als Schablone für eine Trägerplatte aus stabiler Pappe – ohne Löcher und Nuten. Auf dieser habe ich später den Batteriehalter, das OLED-Display, den Ein/Aus-Schalter und die Smartphone-Halterung befestigt. Die Radkästen habe ich kreativ aus einer Müsliverpackung gefertigt.
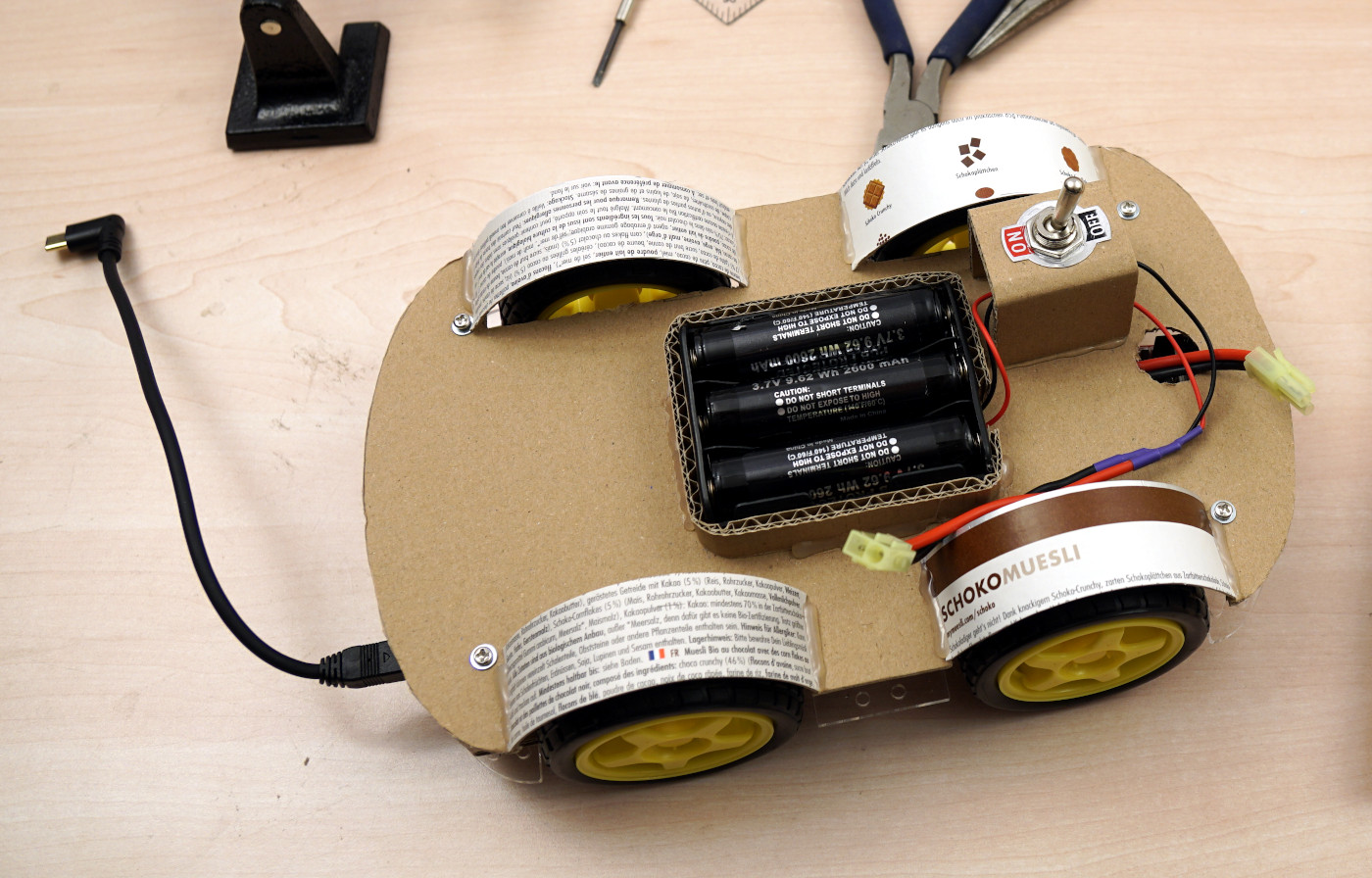
OpenBot chassis build cardboard chassis
Halterung für das Smartphone
Die Smartphone-Halterung habe ich ebenfalls aus Pappe gefertigt. Diese lässt sich auf den Radkästen befestigen. Das Smartphone wird in eine Tasche geschoben und auf der Rückseite mit Klettverschluss gesichert. Vor dem Falten habe ich die Knicke mit einem Geo-Dreieck vorgeprägt.

OpenBot chassis build Smartphone holder
Vorne am Roboter montiert ergibt sich folgender Aufbau:

OpenBot chassis build Smartphone holder mounted
Von hinten sind die Verstärkungen der Halterung zu erkennen. Diese verhindern Schäden, falls das Auto unter Möbel fährt oder hängen bleibt.
OpenBot chassis build Smartphone holder back view
OLED-Display montieren
Zum Abschluss habe ich die Halterung für das OLED-Display neben dem Schalter befestigt. Die vier Anschlusskabel habe ich bewusst verlängert, um den oberen Teil des Chassis problemlos abnehmen zu können. Dafür habe ich Female-to-Female und Female-to-Male Jumper Kabel verwendet.
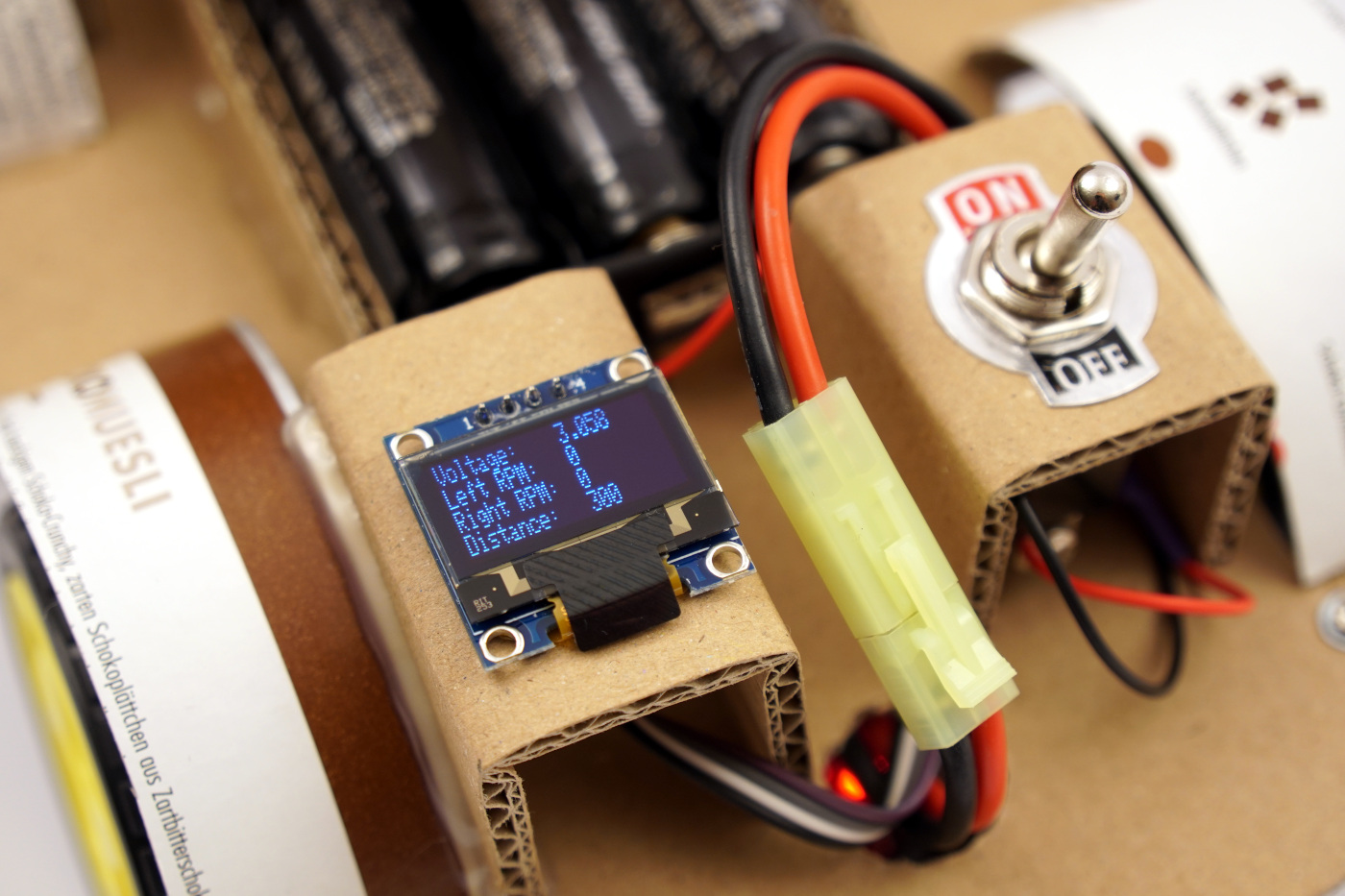
OpenBot switch and OLED display
Fazit
Mir persönlich macht es viel Spaß, mit einfachen Materialien wie Pappe kreative Lösungen zu gestalten. Wer möchte, kann natürlich auch den offiziellen OpenBot 3D-Druck verwenden. Während der gesamten Bauphase habe ich das Fahrzeug regelmäßig getestet, um sicherzustellen, dass alles funktioniert. Im nächsten Beitrag geht es um die Verkabelung des OpenBot, damit das Roboter Auto auch wirklich fahren kann.
Artikel Übersicht OpenBot Roboter Auto:
OpenBot – Dein Smartphone wird zu einem autonomen Roboter Auto – EinleitungOpenBot – Dein Smartphone steuert ein Roboter Auto – benötigte Bauteile Teil 1-2
OpenBot – Dein Smartphone steuert ein Roboter Auto – benötigte Bauteile Teil 2-2
OpenBot – Dein Smartphone steuert ein Roboter Auto – Chassis bauen
OpenBot – Dein Smartphone steuert ein Roboter Auto – Verkabelung
OpenBot – Dein Smartphone steuert ein Roboter Auto – Arduino Firmware aufspielen
OpenBot – Dein Smartphone steuert ein Roboter Auto – Android App und erster Probelauf
OpenBot – Dein Smartphone steuert ein Roboter Auto – Trainingsdaten aufzeichnen
OpenBot – Dein Smartphone steuert ein Roboter Auto – Trainingsumgebung einrichten
OpenBot – Dein Smartphone steuert ein Roboter Auto – das neuronale Netz trainieren
OpenBot – Dein Smartphone steuert ein Roboter Auto – Android Studio und Smartphone einrichten
OpenBot – Dein Smartphone steuert ein Roboter Auto – die eigene OpenBot Android App erstellen











Recent Comments