

Das original SunFounder Programm für die Steuerung des Roboter Autos ist von seiner Architektur eine Server / Client Lösung. Diese Architektur ist komplex und sicher nicht so leicht für Kinder und Jugendliche zu verstehen. Da ich aber immer eine simple Lösung für den Einstieg in ein Projekt wie ein Roboter Auto vorziehe, habe ich meine eigenen beiden Programme geschrieben um das Raspberry Pi Auto steuern zu können. Von der Herangehensweise habe ich mich an die Architektur wie in meinem Buch „Roboter-Autos mit dem Raspberry Pi“ beschrieben gehalten. So habe ich ein Programm geschrieben, dass die Logik für die Ansteuerung der gelben Antriebsmotoren und der drei Servo Motoren kapselt. Weiter gibt es dann ein Hauptprogramm das die Logik für die Steuerung über die Tastatur beinhaltet. Dieses Programm wird im Terminal Fenster ausgeführt und über die Eingabe von Buchstaben auf der Tastatur kann dann das SunFounder Roboter Auto gelenkt werden.
SunFounder Roboterbausatz Smart Video Car Kit Roboter Auto
Steuerprogramm Roboter Auto
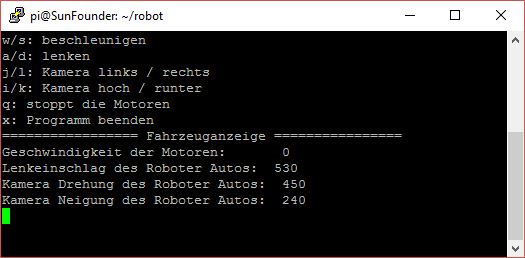
Wie eingangs erläutert gibt es zwei Python Programme einmal das „SunFounderMotorControllerAdvanced.py“ das die Logik für die Steuerung der Motoren beinhaltet. Mit diesem Programm alleine kann das Roboter Auto noch nicht gesteuert werden. Für die Steuerung über die Tastatur wird noch das Programm „SunFounderRobotControlAdvanced.py“ benötigt. Dieses importiert das Programm „SunFounderMotorControllerAdvanced.py“ und bietet die Möglichkeit über die Tastatur das Auto fernzusteuern. Wird das Programm ausgeführt zeigt es ein kleines Menü, dass die Tastenbelegung für die Steuerung anzeigt. So wird das Auto mit den Tasten W/S für vorwärts / rückwärts hin und her bewegt. Mit den Tasten A/D für linkes/rechts wird die Lenkung des Roboters angesteuert. Mit der Taste Q werden alle Eingaben auf initial gesetzt und mit der X-Taste wird das Programm beendet.
SunFounder Roboterbausatz Smart Video Car Kit Steuerprogramm
Kamera Steuerung
Für die Steuerung der Kamers also links/rechts und hoch/runter werden dann die Tasten J/L (links/rechts) und I/K (hoch/runter) verwendet. So ist es möglich die Kamera in alle Richtungen zu neigen und zu drehen.
Download
Beide Programme können auf GitHub herunter geladen werden GitHub
Hinweis
Wenn Ihr das von mir geschriebene Programm verwendet beachtet bitte, dass die Servo Motoren kalibriert werden müssen. Das geht einmal für feine Anpassungen im Programm selber oder aber auch mit dem Schraubenzieher durch umsetzen der Servo Arme.
Weiter muss noch die Adafruit PCA9685 Servo Kontroller Bibliothek installiert werden. Diese ist so aktuell noch nicht auf dem Roboter Auto vorhanden wenn Ihr der SunFounder Anleitung gefolgt seit. Eine Beschreibung habe ich hier veröffentlicht.
Adafruit PCA9685 Bibliothek: 16-Kanal PCA9685 Servo Kontroller
Zusätzlich muss noch wie n meinem Buch beschrieben readchar installiert werden. Mit readchar werden die Eingaben über die Tastatur eingelesen. Dazu führt bittet den folgenden Befehl aus.
Befehl: sudo pip install readchar
Video Roboter Auto
Das Video zeigt die von mir implementierte Steuerung des Roboter Autos in Aktion. Als Rechner kommt ein Raspberry Pi 2 Model B zum Einsatz.

Roboterautobausatz Bezugsquelle
Ich habe den Bausatz von SunFounder über Amazon bezogen. Als wer Lust hat selber dieses Auto zu bauen kann der nachfolgenden Werbung folgen und den Bausatz kaufen.

Zusammenfassung
Ich hoffe mit dem von mir geschriebenen Programm etwas die Komplexität der SunFounder Lösung reduzieren zu können. So sollte das Roboter Auto für Beginner hoffentlich noch mehr Spaß machen. Auch ist die Architektur der Lösung von mir aus meinem Buch sicher dem einen oder anderen Leser meines Buches vertraut.
Ich würde mich sehr über Anregungen und Ideen zu dem Programm freuen. Von Marc habe ich schon nützliche Tipps bekommen und diese einfließen lassen.
Artikel Übersicht SunFounder Roboter Auto-Bausatz:
SunFounder Roboterbausatz – Smart Video Car für Raspberry PiSunFounder Roboterbausatz – Smart Video Car Zusammenbau
SunFounder Roboterbausatz – Smart Video Car Verkabelung
SunFounder Roboterbausatz – Smart Video Car Software Installation
SunFounder Roboterbausatz – Smart Video Car Steuerprogramm
SunFounder Roboterbausatz – Smart Video Car Raspberry Pi Kamera Modul












Woran kann es liegen, dass bei mir ein Hinterrad vorwärts, das andere rückwärts läuft?
Hallo Hans,
ich würde sagen das bei einem der Motoren die Kabel also +/- vertauscht werden müssen.
Viele Grüße,
Maker
Danke, es funktioniert. Es ist allerdings seltsam, denn die Original Software von Sunfounder läuft mit der ursprünglichen Verkabelung. Vermutlich habe ich eine ältere Version des Bausatzes.