


Im ersten Teil wurde erklärt welche Pin welche Bedeutung auf dem ESP8266 NodeMCU hat und die ersten Komponenten miteinander verbunden In diesem 2. Teil werden die notwendigen Kabel gesteckt die gebraucht werden damit der Servo Kontroller zusammen mit dem Motortreiber die Steuerung der Motoren übernehmen kann. Auch hier gehen wir zusammen Schritt für Schritt durch die Verkabelung der einzelnen Komponenten. Los geht es damit den Motortreiber am Servo Kontroller anzuschließen.
Motortreiber am Servo Kontroller anschließen
Der Motortreiber verfügt über sechs Anschlüsse. Diese haben die Bezeichnung ENA, IN1, IN2, IN3, IN4 und ENB. Über diese sechs Anschlüsse wird z. B. die Drehrichtung der Motoren gesteuert und die Geschwindigkeit.
Motoren Geschwindigkeit steuern
Am Motortreiber L298N können zwei DC Motoren angeschlossen werden. Damit sich diese unterschiedlich schnell drehen wird am ENA und ENB Pin ein PWM Signal angelegt. Dieses PWM Signal wird über den Servo Kontroller erzeugt. So lassen sich die Motoren ansteuern das sich diese von Stillstand bis zur maximale Umdrehungszahl schnell drehen.
Motoren Drehrichtung steuern
Soll die Drehrichtung gesteuert werden damit z. B. Roboter Auto auch rückwärts fahren kann kommen die Pins IN1 bis IN4 ins Spiel. Die Pins IN1 und IN2 sind für Motor 1 relevant und die Pins IN3und IN4 für den Motor 2.
Nachfolgend wird die Steuerung am Beispiel des Motors 1 erklärt. Je nachdem ob an IN1 oder IN2 ein HIGH Signal anliegt dreht sich der Motor vorwärts oder rückwärts. Liegt an IN1 und IN2 ein HIGH Signal an ist der Motor kurzgeschlossen und so erreicht man eine Art Motorbremse. Dann sollte aber am Pin ENA kein PWM Signal anliegen. Sind IN1 und IN2 low dann steht der Motor und dreht sich nicht.
Verkabelung zwischen Motortreiber und Servo Kontroller
In der nachfolgenden Tabelle wir die Verkabelung des Motortreibers aufgeführt. Da sich der PCA9685 Servo Kontroller so steuern lässt das dieser ein low (0) oder high (1) Signal ausgibt kann über diese Funktion die Drehrichtung der Motoren gesteuert werden. Mehr dazu dann im Abschnitt Programmierung und hier im speziellen zu der Programmierung mit dem PCA9685 Servo Kontroller.
| L298N Motortreiber | PCA9685 Servo Kontroller |
| ENA | Kanal 0 |
| IN1 | Kanal 1 |
| IN2 | Kanal 2 |
| IN3 | Kanal 3 |
| IN4 | Kanal 4 |
| ENB | Kanal 5 |
Um die Verbindung herstellen zu können kommen sechs Female-to-Female Jumper Kabel zum Einsatz. Fertig verkabelt sieht jetzt der Aufbau im Roboter Auto wie nachfolgend gezeigt aus.
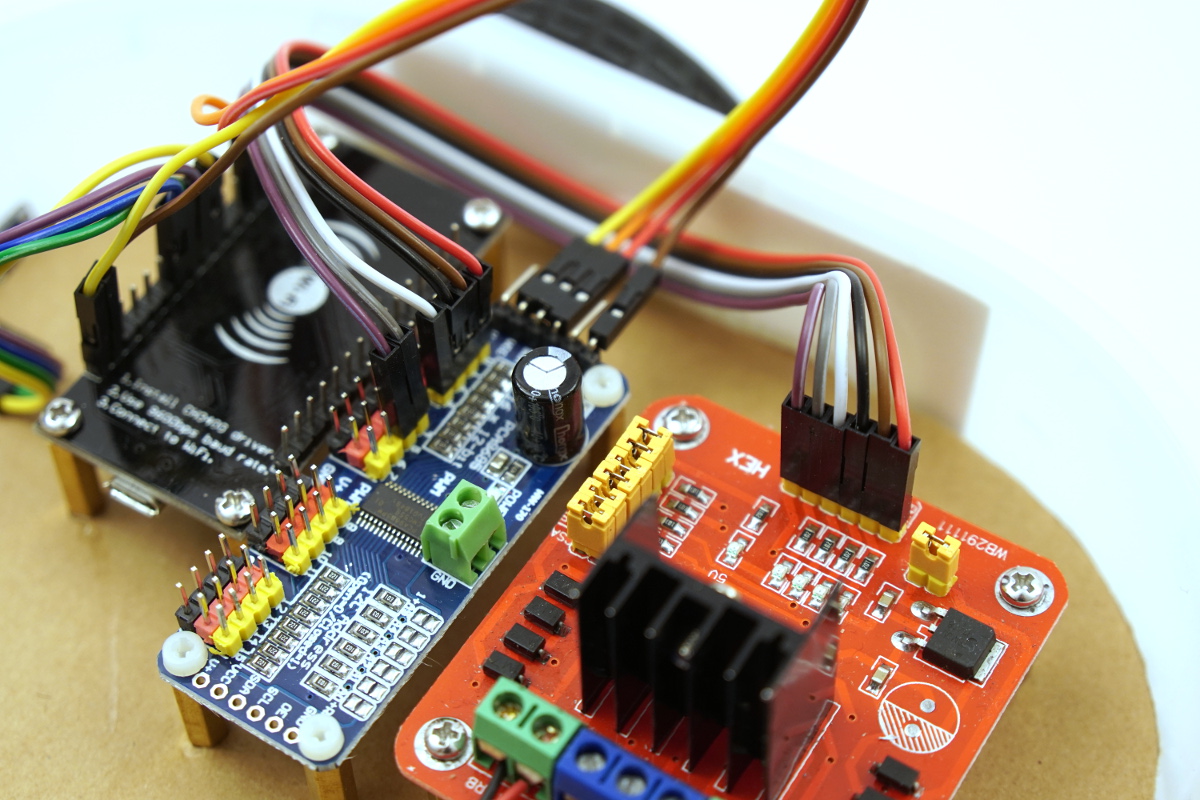
ESP8266 NodeMCU robot car PCA9685 L298N H-Bridge
Motoren am Motortreiber anschließen
Die Motoren müssen am Motortreiber angeschlossen werden. Dazu wird der Motor der linken Seite als Motor 1 angeschlossen. Der Motor der rechten Seite des Roboter Autos als Motor 2. Wichtig ist, dass die Kabel von den Farben vertauscht angeschlossen werden. Also vertauscht in dem Sinne zwischen Motor 1 und Motor 2 von den Farben und wie der Motor im Roboter Auto eingebaut ist. Der Hintergrund ist, dass sich die Motoren in die gleiche Richtung drehen sollen. Wenn dem nicht so ist und sich das Roboter Auto z. B. im Kreis dreht wenn es eigentlich vorwärts fahren soll dann müssen genau hier die Kabel getauscht werden von dem Motor der sich in die falsche Richtung dreht.
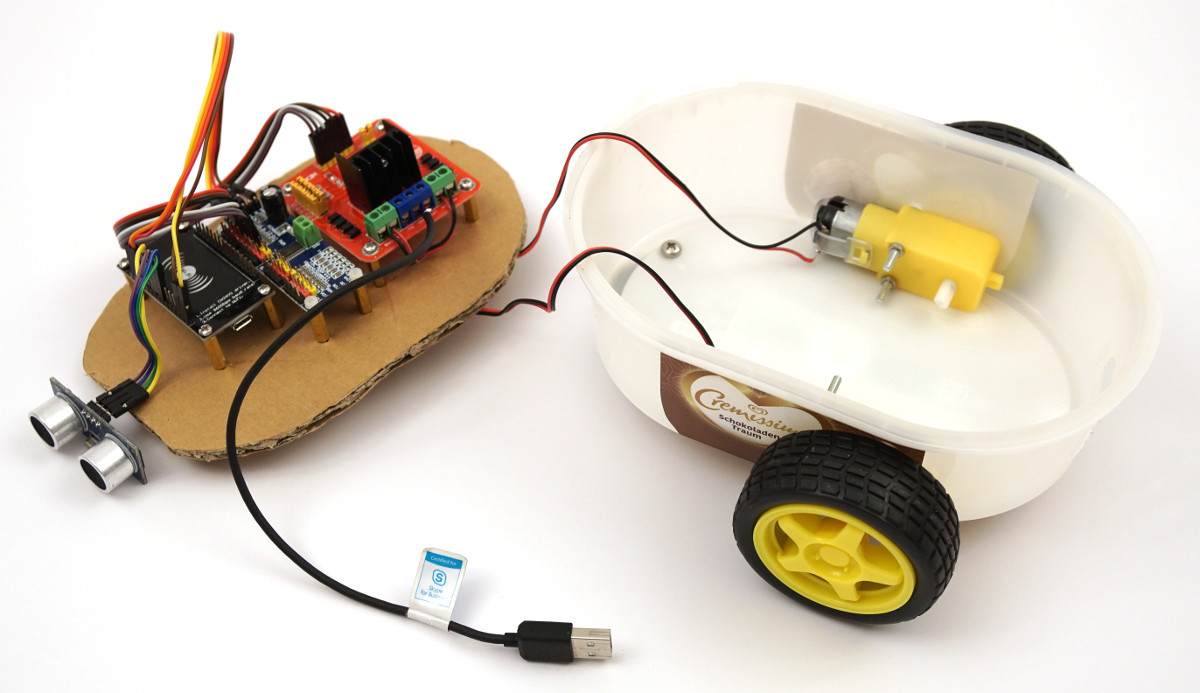
ESP8266 NodeMCU robot car dc motor wiring
Jetzt ist soweit die logische Verkabelung der elektronischen Komponenten abgeschlossen und die Stromversorgung des Roboter Autos muss noch hergestellt werden.
Stromversorgung herstellen
Es fehlt lediglich noch das USB Kabel das abgeschnitten wird um den Motortreiber mi +5V / GND zu versorgen damit sich die Motoren auch drehen können. Alte USB Kabel bekommt man z. B. auf dem lokalen Wertstoffhof im Container für den Elektronikschrott. Hier z. B. von einer alten Tastatur das USB Kabel abschneiden. Jetzt sind die vier Adern des USB Kables zu sehen. Das rote Kabel ist das für die +5V und das schwarze ist das GND Kabel. Diese beiden Kabel also rot und schwarz sind die Kabel die benötigt werden. Die weiße und grüne Adern sind die Leitungen für die Daten und diese werden nicht benötigt. Daher können diese so knapp wie möglich abgeschnitten werden.
Das folgende Bild zeigt das schwarze abgeschnittene USB Kabel wie ich es am Motortreiber angeschlossen habe.
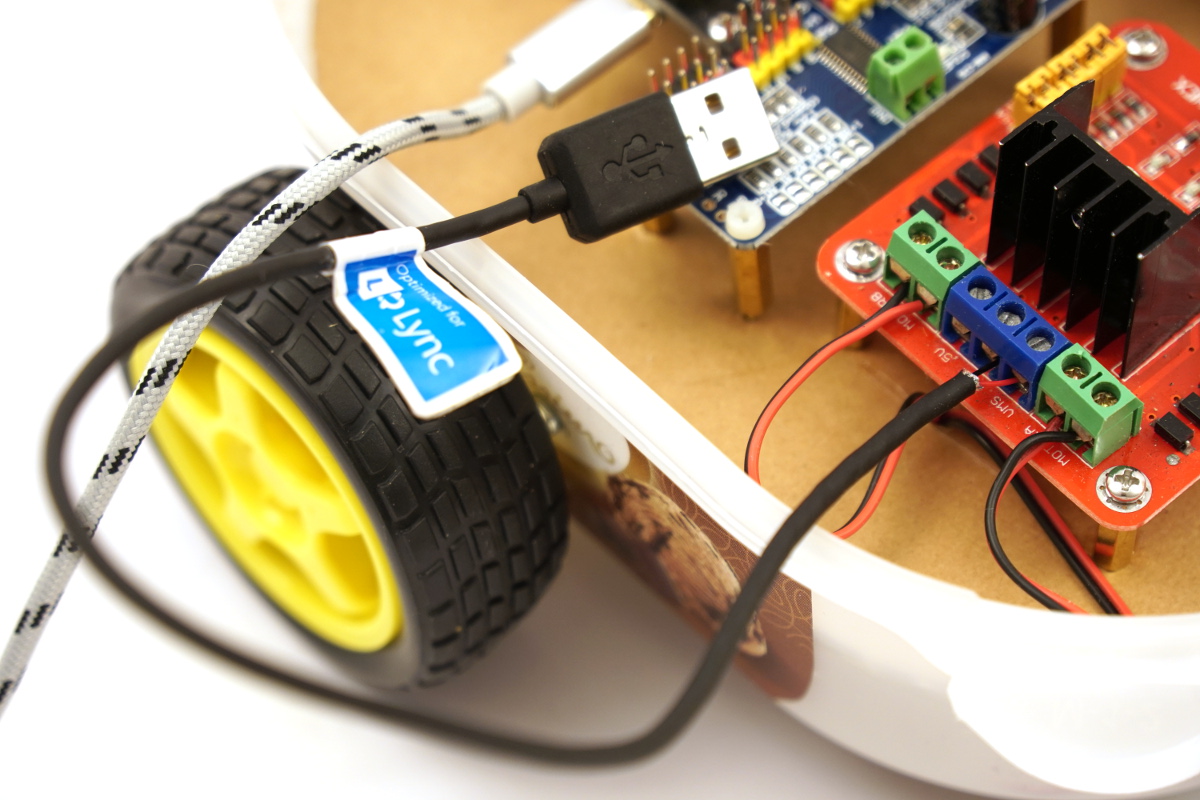
ESP8266 NodeMCU robot car micro usb cable
Zusammenfassung
Jetzt sind alle Kabel angeschlossen und das Roboter Auto ist fahrbereit. Noch fehlt die Software für die Steuerung des Roboter Autos die auf den ESP8266 NodeMCU aufgespielt werden muss. Damit das klappt muss der ESP8266 NodeMCU mit einem micro USB-Kabel am PC angeschlossen werden. Mehr wie genau das alles funktioniert erfährst Du im nächsten Bericht.
Artikel Übersicht ESP8266 NodeMCU Roboter Auto:
Roboter bauen mit dem ESP8266 Entwicklungsboard – EinleitungRoboter bauen mit dem ESP8266 Entwicklungsboard – Stromversorgung
Roboter bauen mit dem ESP8266 Entwicklungsboard – Bauteile
Roboter bauen mit dem ESP8266 Entwicklungsboard – Chassis
Roboter bauen mit dem ESP8266 Entwicklungsboard – Verkabelung Teil 1
Roboter bauen mit dem ESP8266 Entwicklungsboard – Verkabelung Teil 2
Roboter bauen mit dem ESP8266 Entwicklungsboard – Arduino Entwicklungsumgebung einrichten
Roboter bauen mit dem ESP8266 Entwicklungsboard – Ultraschall Sensor und Motorensteuerung
Roboter bauen mit dem ESP8266 Entwicklungsboard – WIFI Fernsteuerung
Roboter bauen mit dem ESP8266 Entwicklungsboard – Servo Motor Steuerung
Roboter bauen mit dem ESP8266 Entwicklungsboard – OLED Display
Roboter bauen mit dem ESP8266 Entwicklungsboard – Magnetometer
Roboter bauen mit dem ESP8266 Entwicklungsboard – GPS Empfänger Einführung
Artikel Ausblick:
Roboter bauen mit dem ESP8266 Entwicklungsboard – GyroskopRoboter bauen mit dem ESP8266 Entwicklungsboard – GPS Wegpunkte
Roboter bauen mit dem ESP8266 Entwicklungsboard – Solarzelle












Recent Comments