


Damit das Roboter Auto auch fahren kann müssen die einzelnen Komponenten untereinander angeschlossen werden. Die Anleitung führt wieder Schritt für Schritt durch die Verkabelung und zeigt anhand von Bildern wie und wo die Kabel angesteckt gehören. Die Beschreibung der Verkabelung des Roboter Autos ist in in zwei Teile aufgeteilt, damit der Text nicht zu lang wird und die Übersicht leidet. Beginnen tut die Beschreibung mit der Verkabelung der beiden Elektromotoren.
Getribemotoren verkabeln
An den Getriebemotoren müssen jeweils zwei Kabel für die Stromversorgung angelötet werden. Wichtig dabei ist, dass vor dem anlöten der Kabel die Motoren aus dem gelben Plastikgetriebe ausgebaut werden. Andernfalls kann es passieren, dass das Gehäuse der Getriebemotoren mit dem heißen Lötkolben etwas beschädigt wird. Daher bitte mit einer Zange die Lasche lösen mit der die Motoren im Gehäuse fest gehalten werden. Wenn die beiden Motoren ausgebaut sind, bitte jeweils ein rotes und ein schwarzes Kabel am Motor bzw. an den jeweiligen Kupferlaschen anlöten.
Hinweis: Bitte darauf achten, dass die Kabel in das Innere des Gehäuses zeigen. Also nicht am Rand sind
Nach dem die Kabel angelötet sind, die Motoren wieder im Gehäuse stecken können diese wieder fest im Chassis eingebaut werden. Das nachfolgende Bild zeigt die beiden Motoren mit den angelöteten Kabeln schon fertig verbaut im Roboter Auto Chassis.

ESP8266 NodeMCU robot car dc motor mount final
ESP8266 NodeMCU Anschlüsse
Das Entwicklerboard ESP8266 NodeMCU verfügt über eine Vielzahl von Anschlüssen die als Pins über die Platine heraus geführt sind. Neben diesen Pins ist noch eine USB Schnittstelle verbaut über die der ESP8266 Chip programmiert werden kann und auch im Roboter Auto mit Strom versorgt wird.
Wichtig ist aber zunächst einmal zu verstehen, welche Bedeutung die einzelnen Pins haben. Daher zeigt das nachfolgende Bild das Layout der ESP8266 NodeMCU Platine und die zu den Pins dazugehörige Beschriftung. Am besten dieses Bild ausdrucken und mit auf den Schreibtisch legen um schnell die Pin Belegung nachsehen zu können.
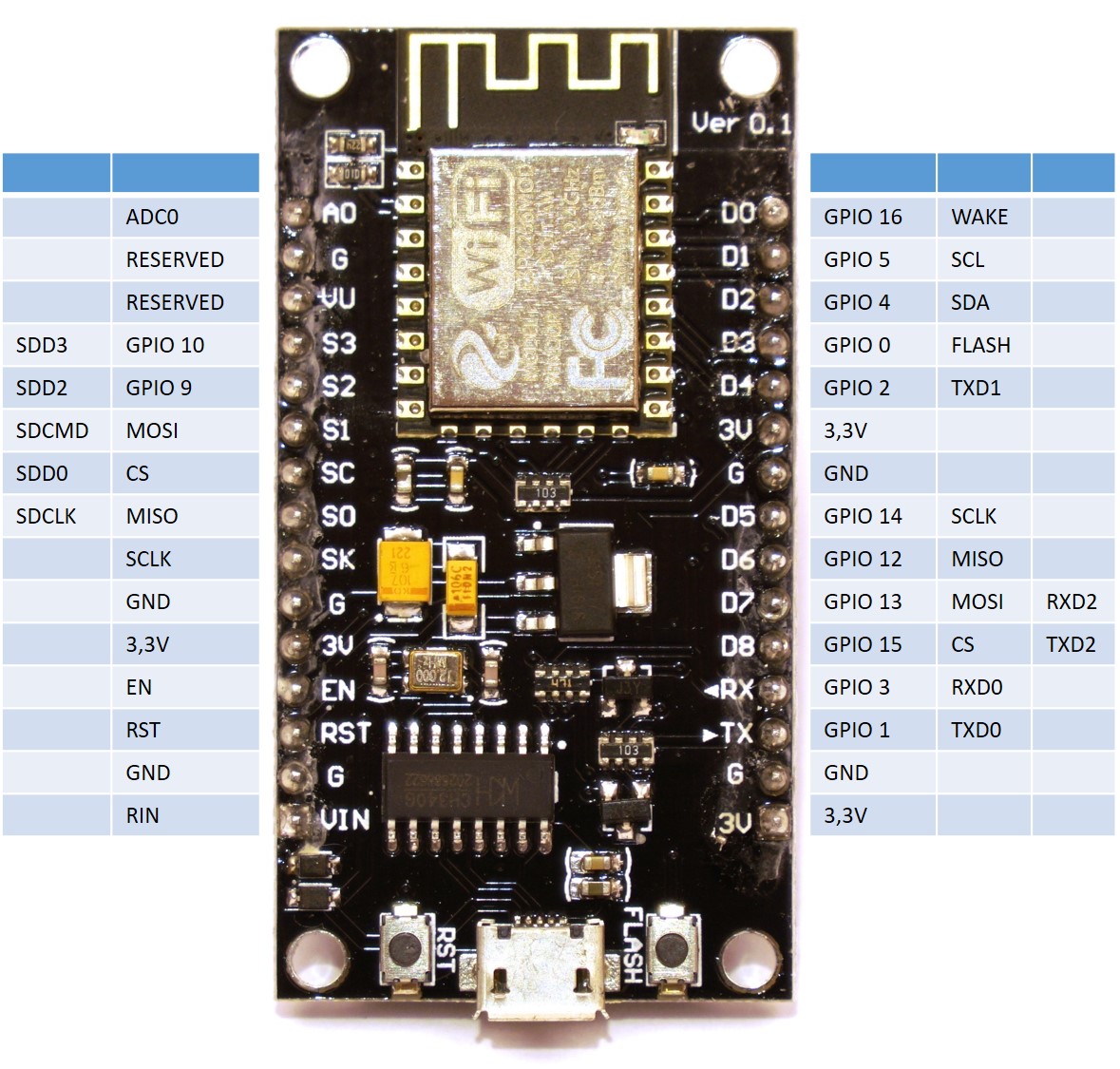
ESP8266 NodeMCU pin number description
Ultraschall Sensor am ESP8266 anschließen
Der Ultraschall Sensor HC-SR04 verfügt über vier Pins. Das sind einmal zwei Pins für die Stromversorgung mit 3,3V bis 5 V und dem GND Anschluss. Die beiden anderen Pins sind einmal der Trigger Pin und Echo Pin. Über den Trigger Pin erhält der Ultraschall Sensor den Befehl mit der Entfernungsmessung zu starten und über den Echo Pin wird mehr oder weniger die gemessene Entfernung über den zeitlichen Verlauf ermittelt. Wie genau das funktioniert wird dann im Kapitel Programmierung des Ultraschall Sensor beschrieben.
Nachfolgend eine kleine Übersicht welcher Pin des Ultraschall Sensor mit welchem Pin am ESP8266 NodeMCU verbunden wird.
| Ultraschall Sensor HC-SR04 | ESP8266 NodeMCU |
| GND | GND |
| Trig | D5 / GPIO14 |
| Echo | D6 / GPIO12 |
| VIN | 3,3V |
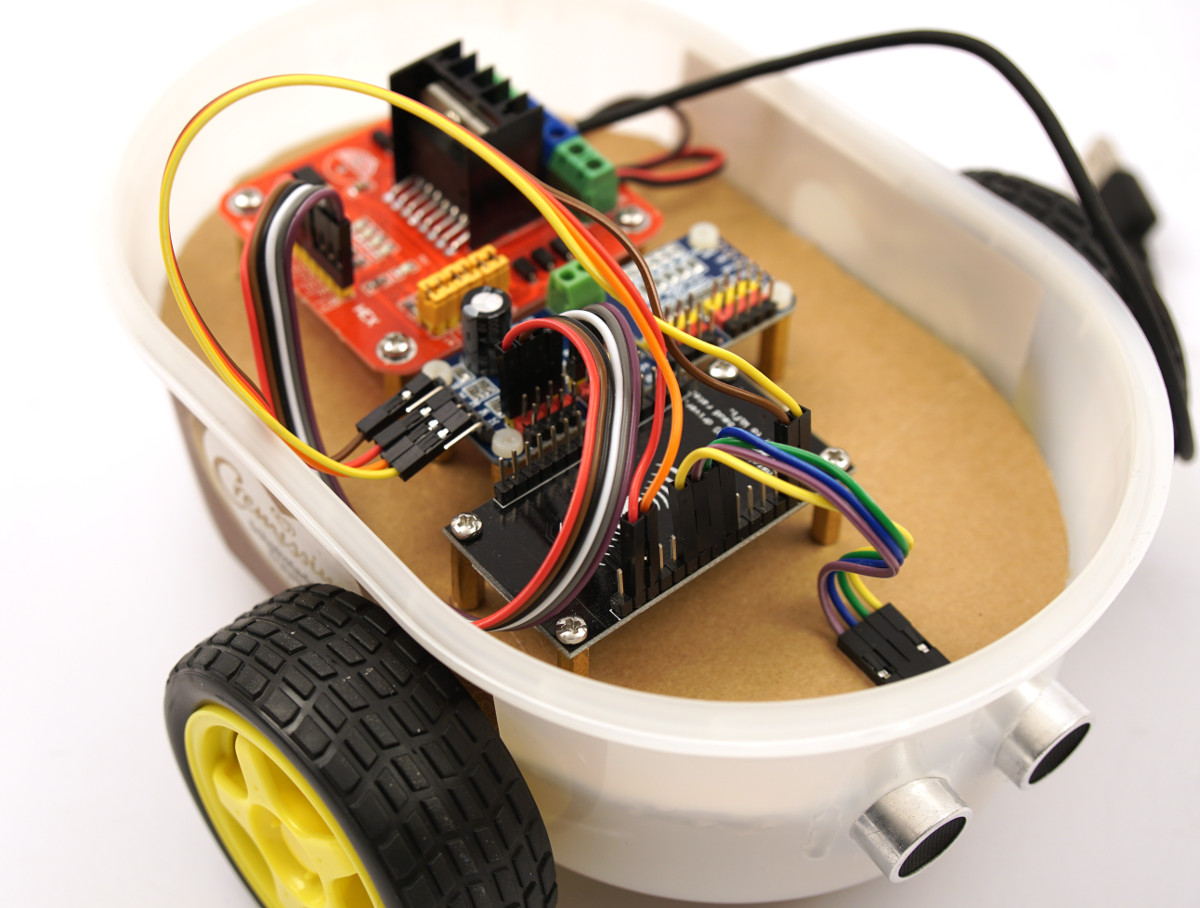
Um die Verbindung herstellen zu können kommen vier Female-to-Female Jumper Kabel zum Einsatz. Fertig verkabelt sieht jetzt der Aufbau im Roboter Auto wie nachfolgend gezeigt aus.
ESP8266 NodeMCU – robot car HS-SR04 ultrasonic sensor
Servo Kontroller am I2C Bus des ESP8266 anschließen
Der PCA9685 Servo Kontroller sowie der ESP8266 verfügen jeweils über einen I2C Bus. Über diesen I2C Bus kann der ESP8266 mit dem PCA9685 Chip kommunizieren. So ist es möglich über die 16-Kanäle des Servo Kokntrollers z. B. Servo Motoren zu steuern, LEDs leuchten zu lassen oder wie in diesem Projekt einen Motortreiber anzusteuern.
Nachfolgend eine kleine Übersicht welcher Pin des Servo Kontroller mit welchem Pin am ESP8266 NodeMCU verbunden wird. Um die Verbindung herstellen zu können kommen vier Female-to-Female Jumper Kabel zum Einsatz.
| PCA9685 Servo Kontroller | ESP8266 NodeMCU |
| GND | GND |
| SCL | D1 / GPIO5 |
| SDA | D2 / GPIO4 |
| VIN | 3,3V |
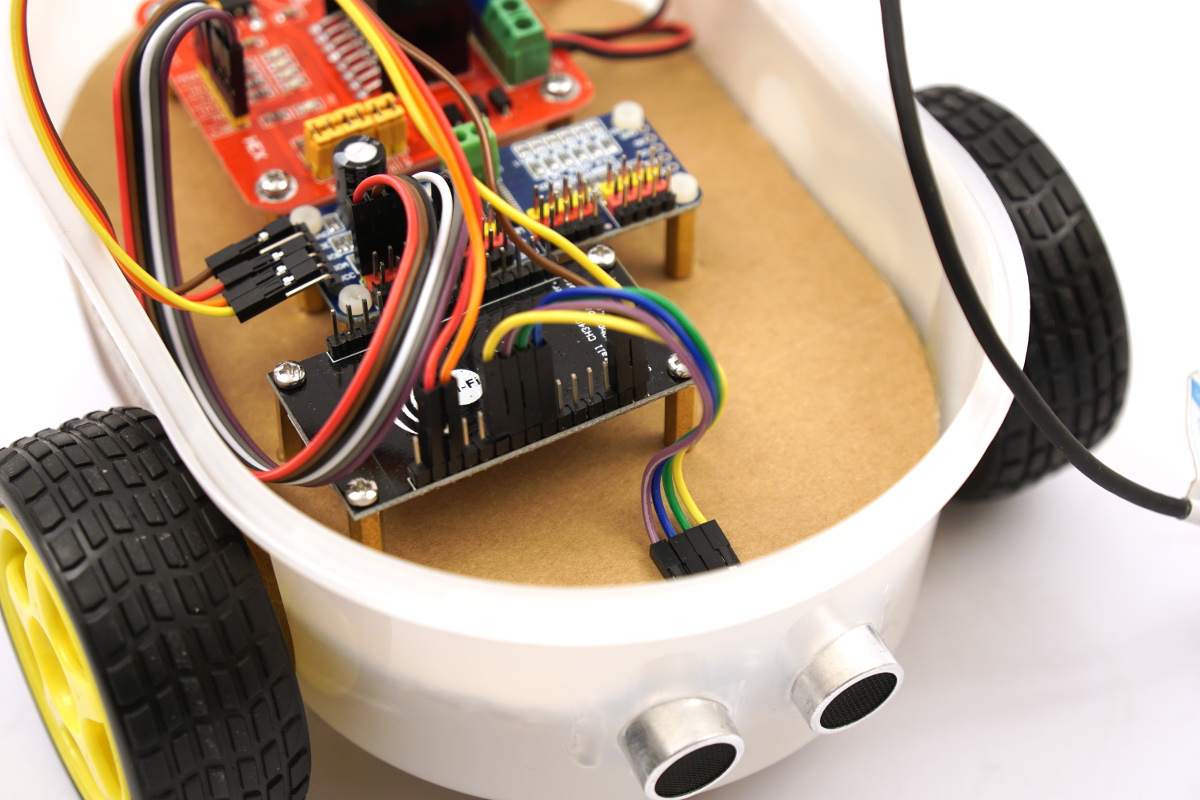
Fertig verkabelt und etwas schwer zu erkennen sieht jetzt die Verkabelung des Servo Kontrollers mit dem ESP8266 im Roboter Auto wie nachfolgend gezeigt aus.
ESP8266 NodeMCU – robot car PCA9685 serco controller
Zusammenfassung
Wichtig in diesem ersten Teil der Verkabelung war zu verstehen, welche Pins welche Bedeutung auf dem ESP8266 NodeMCU Board haben. Denn nur so lassen sich die weiteren elektronischen Komponenten logisch mit der Recheneinheit verbinden und später auch programmieren. Anschließend wurde in den einzelnen Abschnitten erklärt was wie verbunden werden muss. Jetzt sind fast alle Kabel angeschlossen und das Roboter Auto ist so gut wie fahrfertig. Es fehlt noch die Verkabelung des Motortreibers mit dem Servo Kontroller welche im 2. Teil beschrieben wird.
Artikel Übersicht ESP8266 NodeMCU Roboter Auto:
Roboter bauen mit dem ESP8266 Entwicklungsboard – EinleitungRoboter bauen mit dem ESP8266 Entwicklungsboard – Stromversorgung
Roboter bauen mit dem ESP8266 Entwicklungsboard – Bauteile
Roboter bauen mit dem ESP8266 Entwicklungsboard – Chassis
Roboter bauen mit dem ESP8266 Entwicklungsboard – Verkabelung Teil 1
Roboter bauen mit dem ESP8266 Entwicklungsboard – Verkabelung Teil 2
Roboter bauen mit dem ESP8266 Entwicklungsboard – Arduino Entwicklungsumgebung einrichten
Roboter bauen mit dem ESP8266 Entwicklungsboard – Ultraschall Sensor und Motorensteuerung
Roboter bauen mit dem ESP8266 Entwicklungsboard – WIFI Fernsteuerung
Roboter bauen mit dem ESP8266 Entwicklungsboard – Servo Motor Steuerung
Roboter bauen mit dem ESP8266 Entwicklungsboard – OLED Display
Roboter bauen mit dem ESP8266 Entwicklungsboard – Magnetometer
Roboter bauen mit dem ESP8266 Entwicklungsboard – GPS Empfänger Einführung
Artikel Ausblick:
Roboter bauen mit dem ESP8266 Entwicklungsboard – GyroskopRoboter bauen mit dem ESP8266 Entwicklungsboard – GPS Wegpunkte
Roboter bauen mit dem ESP8266 Entwicklungsboard – Solarzelle












Recent Comments