

In den Kopf meines Roboter habe ich eine Raspberry Pi Kamera, einen Ultraschall Sensor sowie zwei LED Matrix Module verbaut. Der Mund ist ein Stück Plastikschlauch das ich noch von dem Bau eines Feinstaubsensors übrig hatte. Der Kopf selber hat noch zwei Federn bekommen und eine kleine Mütze um etwas netter auszusehen.
Raspberry Pi Kamera
Eine Kamera im Bot ist natürlich wichtig und mit einer Weitwinkelkamera sind verschiedene Funktionen vorstellbar. So wäre es möglich eine Foto-Box für die Aufnahme von lustigen Bilder auf z. B. einer Geburtstagsparty zu bauen. Aber auch wäre ein Video-Chat mit z. B. entfernten Familienmitgliedern vorstellbar. Natürlich könnte der Bot auch vom Fenster aus den Garten im Blick behalten und ein live Bild streamen.

Raspberry PI Kamera Module
Das Bild zeigt verschiedene Raspberry Pi Kamera Modelle. Ich habe für den Roboter die mittlere Kamera die Weitwinkelkamera verbaut. Diese ist deutlich besser als die anderen beiden Modelle geeignet, da im Bild viel mehr Informationen zu sehen sind als mit einer normalen Raspberry Pi Kamera. Ich bin mir noch nicht ganz sicher welche Funktionen alle mit der Kamera umgesetzt werden sollten. Aber von einer Kinderzimmerüberwachung sehe ich erst einmal ab. Das wäre ein Projekt für Kinder die schon selber Informatikunterricht an der Schule haben und z. B. ein Vogelhäuschen überwachen möchten um zu sehen welche Vögel sich Futter holen.
Roboter Augen – LED Matrix
Für die Augen habe ich zwei günstige LED Matritzen gekauft. Sie haben 8×8 rote LED’s und können recht einfach mit Python programmiert werden. Angeschlossen wird jede Matrix über den I2C Bus. Daher habe ich auch einen I2C Bus Verteiler im Kopf eingebaut. So muss ich nicht eine Vielzahl an Kabeln durch den Hals in den Körper des Roboters führen.

Toy robot head LED matrix camera and ultrasonic sensor
Auf der Rückseite der LED Matrix kann die I2C Adresse mit dem Lötkolben gesetzt werden. Ich habe bei einer der beiden Matrizen mir zwei Stiftpaare aufgelötet das ich komfortabel mit Jumpern die Adresse wählen kann.
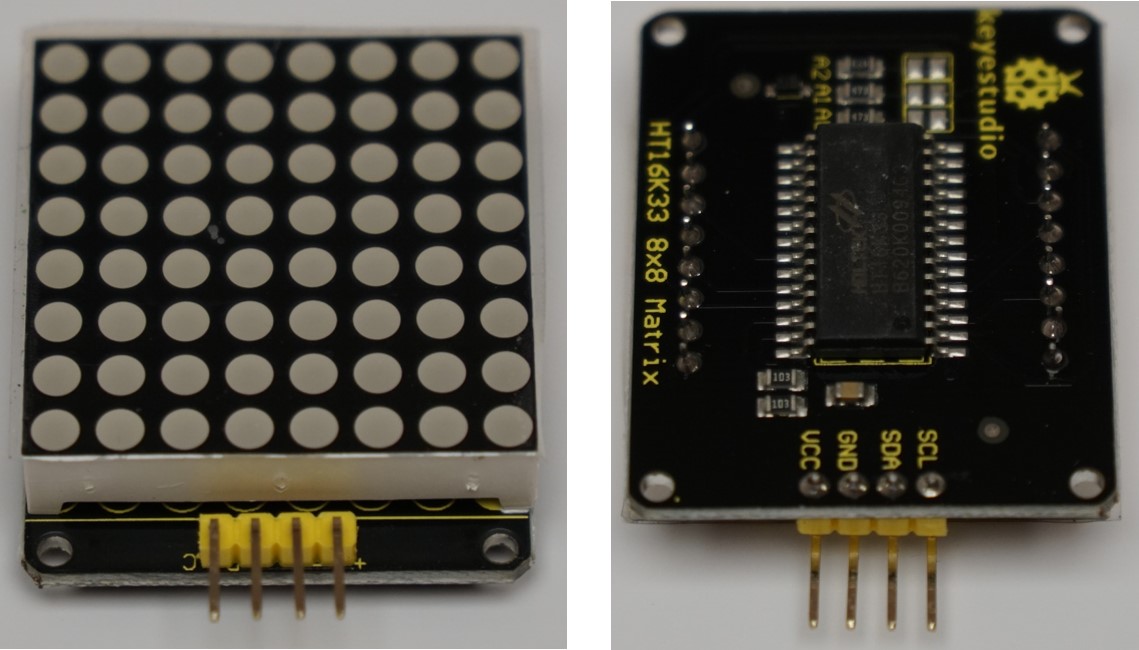
Toy robot head LED matrix front back
Wie die rote Farbe der LEDs wirkt das habe ich noch nicht ausprobieren können. Aber vielleicht wäre eine RGB Matrix oder OLED Display besser. Ich bin gespannt wie sich die Augen weiter entwickeln werden.
Nase – Ultraschall Sensor
Ich dachte mir ein Ultraschall Sensor wäre auch nicht schlecht um mit diesem z. B. Funktionen auslösen zu können. So habe ich, da es sich einfach anbot einen klassischen Ultraschallsensor HC-SR04 der über eine Sende- und Empfangsdose verfügt als Nase eingebaut. Allerdings bin ich dann doch wieder auf einen Ultraschall Sensor mit I2C Schnittstelle gewechselt. Denn dieser läßt sich in meinem Modell einfacher verkabeln. Den I2C Bus habe ich schon bis in den Kopf des Roboters verlegt.
Der SRF08 Ultraschall Sensor wird über den I2C Bus angeschlossen und ist für mich ideal. Da die Programmierung eines Ultraschall Sensors doch deutlich aufwendiger ist, möchte ich an dieser Stelle auf mein Buch verweisen. Dort sind die Details zu diesem Typ von Ultraschall Sensor detailliert beschrieben.
[DE_BOOK_DETAIL DE_BOOK_DETAIL=““]
Zusammenfassung
Der Aufbau des Kopfes ist doch ziemlich aufwendig und Zeitintensiv. In meinem Modell ist sehr viel Elektronik im Kopf eingebaut. Mit ein paar Überlegungen konnte ich auch die Verkabelung der I2C Komponenten optimieren. Leider macht das Pan & Tilt Kit leichte Schwierigkeiten da es nicht stabil genug ist. Aber soweit bin ich mit dem Kopf zufrieden.
Artikelübersicht - Kinder Roboter:
Raspberry Pi Kinder Roboter - EinführungRaspberry Pi Kinder Roboter – Körper
Raspberry Pi Kinder Roboter - Teil 1 Roboter - Arme
Raspberry Pi Kinder Roboter - Teil 2 Roboter - Arme
Raspberry Pi Kinder Roboter – Teil 1 Kopf
Raspberry Pi Kinder Roboter – Teil 2 Kopf
Raspberry Pi Kinder Roboter – Teil 1 Ausstattung
Raspberry Pi Kinder Roboter – Teil 2 Ausstattung
Raspberry Pi Kinder Roboter - Steuereinheit Teil 1
Raspberry Pi Kinder Roboter – Steuereinheit Teil 2
Raspberry Pi Kinder Roboter – Steuereinheit Teil 3 Joystick
Raspberry Pi Kinder Roboter – Gestaltung des Körpers












Recent Comments