


Der Big Rob ist der neueste Roboter den ich entworfen habe für Off-Road Aktivitäten. Der Roboter ist mit der neuesten Technik ausgestattet wie einer präzisen Navigation mit der differential GPS Architektur die ich aufgebaut habe. Mehr Informationen über die differential GPS Lösung finden Sie hier. Die großen Buggy Reifen ermöglichen es dem Roboter in unwegsamen Gelände zu fahren ohne ständig hängen zu bleiben. Die kleinen Raspberry Pi Roboter die ich bis jetzt gebaut hatte, hatten hier ihre Probleme im Garteneinsatz. Die Getriebemotoren haben eine Geschwindigkeit von 35 U pro Minute bei 12 V. Die maximale Stromaufnahme beträgt ca. 1,8 A. Die Motoren habe eine maximale Kraft von ca. 15 kg/cm. Damit sind die Motoren stark genug für den Big Rob um mit dem ganzen Equipment das ich noch einbauen werde herum zu fahren. Das Gehäuse ist groß genug um eine Batterie mit 12V und eventuell 12 Ah von einem Motorrad oder kleinem Auto unterzubringen. Ich bin mir noch nicht sicher ob ich nur einen Raspberry Pi verwenden werde um den Roboter zu steuern. Vielleicht werde ich auch ein NVIDIA Jetson TK1 Developer Kit für die Computer gestützte Bildverarbeitung einbauen. So wäre es möglich den Roboter mit weiteren Fähigkeiten des autonomen Fahrens auszustatten.
Das folgende Bild zeigt zwei Getriebemotoren und den Antriebsstrang auf dem die Räder befetigt werden. Die Buggy Räder werden mit 24mm Schrauben an der Achse befestigt.

Big Rob – mechanic components
Da nächste Bild zeigt zwei Räder und einen Getriebemotor mit dem befestigten Antriebsstrang. Ich habe anschließend den besten Platz für die Befestigung der Komponenten in der Plastikbox gesucht um die Löcher für die Befestigung der Motoren, der Achse und der Kugellager bohren zu können. Die Plastikbox hat sich sehr einfach mit einer normalen Bohrmaschine bearbeiten lassen. Der Kunststoff neigt überhaupt nicht dazu zu splittern.

Big Rob – gear motor and power train
[DE_BOOK_DETAIL DE_BOOK_DETAIL=“DE_BOOK_DETAIL“]
Big Rob – Roboter Design
Die Idee hinter dem Design des Roboters war es ein modulares Chassis zu entwerfen das einfach um weitere Plastikboxen erweitert werden kann die auf die untere Box welches das Chassis des Roboter ist gesetzt werden können. Das nächste Bild zeigt das Roboter Chassis mit den vier Getriebemotoren und den Rädern. Bei den Rädern handelt es sich um Buggy Räder mit einem Durchmesser von 20 cm. Diese sind groß genug damit der Roboter einfach im Garten herum fahren kann und nicht zu groß für die Getriebemotoren.
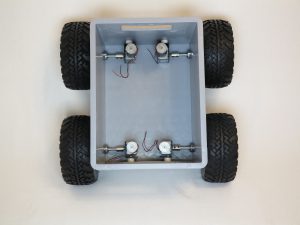
Big Rob 4×4 dc motors
Auf dem Chassis selber kann ich sehr einfach die GPS und W-LAN Antenne befestigen. Zum jetzigen Zeitpunkt bin ich mir noch nicht sicher wo ich die Kamera befestigen werde. Ich habe die Kamera aktuell hinter dem Griff der Plastikbox befestigt. Vielleicht werde ich ein Pan & Tilt Kit für die Kamera verwenden. Leider habe ich habe kein Wasserdichtes Gehäuse für die Kamera in das ein Pan & Tilt Kit passt.

Big Rob front view
Das nächte bild zeigt einen kleinen Raspberry Pi Roboter den ich letztes Jahr gebaut habe mit dem Big Rob im Hintergrund.

Big Rob with little brother
Ich habe alle Komponenten angeschlossen und einen Raspberry Pi 2 Model B für die ersten Tests im Roboter verbaut. In der Mitte oben vom Bild ist der kleine Motortreiber zu sehen der durchgebrannt ist. Ich bin mir nicht sicher was für einen Motortreiber ich als nächstes kaufen soll. Es sollte aber ein Motortreiber sein der mit bis zu 10 A Strom arbeiten kann.

Big Rob prototype setup
Video Big Rob
Nachfolgend zwei Videos die den Big Bot bei seinen ersten Fahrten zeigen. Aktuell wird er noch via live Stream über ein Webinterface gesteuert. Die autonomen Funktionen werden erst noch ergänzt.
Testlauf im Freien:
Das nachfolgende Video ist bei -12°C entstanden im Neuschnee. Hier musste der Big Bot zeigen das er auch bei wiedrigen Wetterverhältnissen fährt und nicht gleich stehen bleibt.

Erster Testlauf:
Das folgende Video zeigt den Roboter bei der ersten Testfahrt in meinem Büro.

Zusammenfassung
Den Roboter zu bauen war recht einfach. Die Die Plastikbox hat sich sehr einfach mit einer normalen Bohrmaschine bearbeiten lassen. Ich habe alle Löcher für die Befestigung der vier Getriebemotoren, für die Kugellager sowie für die Antriebsachsen in die Plastikbox gebohrt. Die Getriebemotoren sind sehr stark und der Roboter fährt mit Ihnen sehr gut und einfach herum. Die Entscheidung die beiden BTS7960B Motortreiber zu verwenden war die richtige Entscheidung. Der BTS7960B Motortreiber kann sehr einfach mit Python angesteuert werden und versorgt die beiden Getriebemotoren pro Seite ausreichend mit Energie.
Artikelübersicht - Big Rob:
RASPBERRY PI ROBOTER – BIG ROB BAUANLEITUNGRASPBERRY PI ROBOTER – PEAK POWER PACK STROMVERSORGUNG
RASPBERRY PI ROBOTER – BIG ROB 4×4 ELEKTROMOTOR ANTRIEB
RASPBERRY PI ROBOTER – BIG ROB MOTORTREIBER BTS7960B UND SOFTWARE
RASPBERRY PI ROBOTER – BIG ROB OUTDOOR-KAMERAGEHÄUSE
RASPBERRY PI ROBOTER – BIG ROB mit differential GPS
RASPBERRY PI ROBOTER – BIG ROB ZÄHNE
RASPBERRY PI ROBOTER – BIG ROB FAHRWERK OPTIMIERUNG
RASPBERRY PI ROBOTER – BIG ROB modularer Aufbau 1-2
RASPBERRY PI ROBOTER – BIG ROB modularer Aufbau 2-2












Superteil kann man einen Schaltplan und eine Materialliste bekommen wenn möglich schon mit Webcam
Ich kann alles mechanische bauen aber die Elektronik
Wenn ja bitte an xxxxxxxxxxxxxxxxxx
Hallo Herr Götz,
ich habe selber ein Buch über den Bau von Roboter-Autos mit dem Raspberry Pi veröffentlicht.
Buch: Roboter-Autos mit dem Raspberry Pi: Planen, bauen, programmieren
In diesem finden Sie alle Details betreffend der Elektronik sowie das Live Video Streaming eingerichtet werden kann. Über die Verlagsseite können Sie dann auch ein fertiges Images herunter laden welches Sie nur noch auf eine micro-SD Karte installieren / schreiben müssen.
Für den Big Rob verwende ich einen wesentlich stärkeren Motortreiber. Das Python Programm wie dieser angesteuert wird können Sie zusammen mit den anderen beschriebenen Programmen im Buch verwenden.
Ich habe gestern die Anleitung zum Big Rob weiter ergänzt. Ich hoffe die Artikel helfen Ihnen soweit weiter was den Bau diesen großen Roboters betrifft.
Viele Grüße,
Maker
Hallo
brauche ich um das Pi Car nachzubauen das Buch oder finde ich die Infos auch in Ihren Beiträgen?
Mir geht es vorallem um die Steuerung der Fahrzeugs.
Lg lukas
Hallo Lukas,
das Buch erleichtert sicher den Einstieg in den Bau eines Roboters und erklärt alles Schritt für Schritt.
Der BigRob Roboter setzt auch auf dem Buch auf verwendet aber etwas andere Motortreiber. Aber die Programme für die Ansteuerung dieser Motortreiber passen wiederum zu dem Buch. So sollte es auch hier keine Probleme geben.
Viele Grüße,
Ingmar
Hallo,
auf der Seite Hackaday wurde ein Projekt Zerobot veröffentlicht.
die steuerung des zerobots geht mittels touchdisplay wäre sowas auh für den BigRob möglich.
der etwickler des Zerobots hat mich auf diesen link weiter geleitet da hat er sein code angepasst.
http://seb.ly/2011/04/multi-touch-game-controller-in-javascripthtml5-for-ipad/
hier noch ein Youtube video:
https://www.youtube-nocookie.com/watch?v=16rxNzQvfYY
Danke und Gruß
Gangwisch