


Das Chassis kann aus vielen Materialien aufgebaut werden. So habe ich gute Erfahrungen mit Chassis gemacht die aus Pappe ganz individuell aufgebaut werden. Hier ist allerdings die Arbeit mit Schere und Teppichmesser notwendig und daher kann es leicht zu Verletzungen kommen. Auch ist der Bau eines Chassis rein aus Pappe sehr zeitaufwändig und eine fertige Box aus z. B. Kunststoff spart hier Zeit. Daher beschreibe ich nachfolgend den Bau eines Chassis aus einer leeren Eisverpackung. Diese ist günstig zu haben, stabil und groß genug um alle Komponenten des Roboter Autos unterbringen zu können. Auch lässt sich das dünne Plastik der Box einfach bearbeiten und bei Fehlern kann diese günstig ersetzt werden.
Das Bild zeigt das Chassis des Roboter Autos aufgebaut aus einer Eiscremeverpackung.
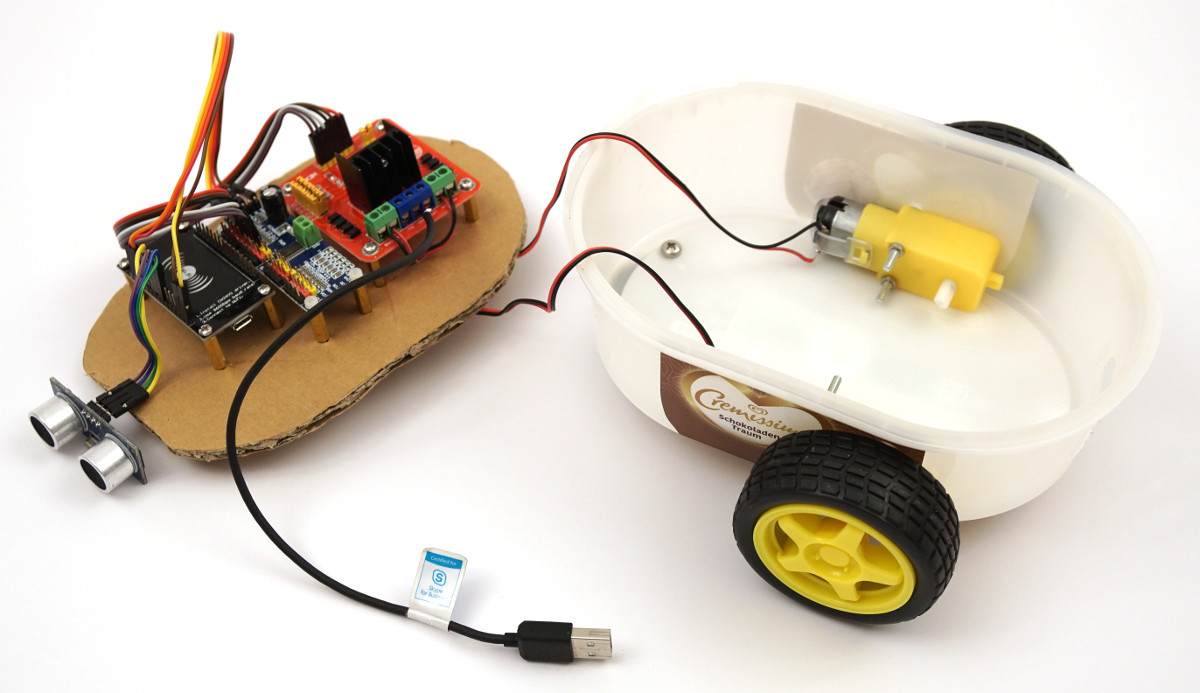
ESP8266 NodeMCU robot car dc motor wiring
Motoren Befestigung
Die beiden Motoren werden links und rechts an den Außenseiten der Eisverpackung befestigt. Wichtig dabei ist, dass die Anschlusskabel der Motoren jeweils in das Innere der Verpackung zeigen also nicht an der Außenseite des Chassis anliegen. Auch haben diese kleinen gelben Modellbaumotoren auf einer Seite einen kleinen Knubbel, der etwas heraus steht. Dieser kleine Knubbel verleiht beim Befestigen der Motoren dem Aufbau zusätzlich an Stabilität.
Idealerweise werden die Motoren so am Chassis befestigt, dass diese so weit wie möglich nach vorne im Chassis Rücken also bis kurz vor die Rundung der Plastikbox.

ESP8266 NodeMCU robot car dc motor mount
Die Motoren selber werden dann jeweils mit zwei M3 Gewindeschrauben mit einer Länge von ca. 3cm am Gehäuse befestigt.
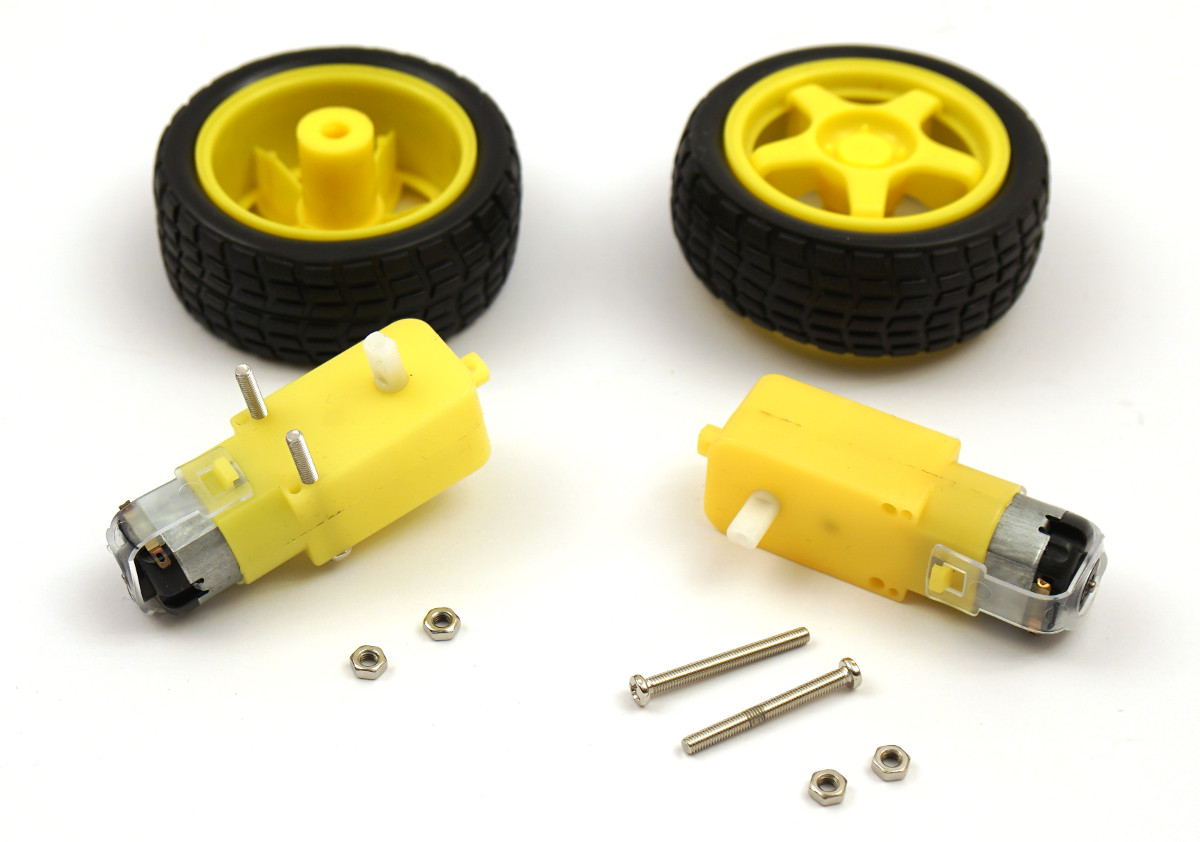
ESP8266 NodeMCU robot car dc motor screws
Bevor jetzt die Löcher in das Chassis also die Eisverpackung geschnitten bzw. gebohrt werden müssen diese ganz genau ausgemessen werden. Andernfalls klappt es nicht die Motoren richtig zu befestigen. Ideal ist es wenn vor dem Bohren der Löcher eine kleine Bohrschablone erstellt wird. Mit dieser lassen sich einmal der richtige sitz der Löcher überprüfen und die Markierungen für die Löcher können ganz einfach auf das Chassis übertragen werden.
Nach dem die Löcher in das Chassis mit einem 3,5mm Bohrer für die befestigungsschrauben gebohrt wurden und für diesen kleinen Knubbel mit einem 3,0mm Bohrer sollten sich die Motoren wie nachfolgend gezeigt am Chassis befestigen lassen. Da für das anlöten der Kabel an den Motoren diese wieder ausgebaut werden müssen, müssen die beiden Motoren noch nicht richtig fest angeschraubt werden.

ESP8266 NodeMCU robot car dc motor mount final
Ultraschall Sensor HC-SR04 befestigen
Der Ultraschall Sensor wird vorne am Chassis idealerweise genau in der Mitte befestigt. Hier ist es ideal wenn ein Loch-Bohrer mit da 16mm zum Einsatz kommt. Durch die so gebohrten Löcher lässt sich der Ultraschall Sensor mit seinem Sende- und Empfangs- Modul sehr gut durchstecken und mit etwas Kleber aus der Heißklebepistole befestigen.
Auch hier lohnt es sich wieder eine kleine Bohrschablone zu erstellen, damit die Löcher richtig sitzen.

ESP8266 NodeMCU robot car HC-SR04 front
Elektronische Komponenten befestigen
Die übrigen elektronischen Komponenten werden auf einem Stück Pappe das in das Chassis passt befestigt. Zu diesen Komponenten gehören einmal der Motortreiber, der Servo-Kontroller und der ESP8266 NodeMCU. Das Stück Pappe passt genau in die Eisverpackung und kommt auf den beiden Motoren zum Liegen. Fertig aufgebaut sieht der Elektronikträger im Chassis jetzt wie folgt aus.

ESP8266 NodeMCU robot car electronics
Zusammenfassung
Der Aufbau des Chassis ist jetzt geschafft und alle Komponenten haben ihren Platz gefunden. Sicher war das Bohren der Löcher je nach Art des Chassis für die Befestigung der Motoren und des Ultraschall Sensors der etwas aufwändigere Teil in diesem Abschnitt. Die Befestigung der elektronischen Komponenten auf der Pappe sollte aber wieder einfacherer gewesen sein.
Artikel Übersicht ESP8266 NodeMCU Roboter Auto:
Roboter bauen mit dem ESP8266 Entwicklungsboard – EinleitungRoboter bauen mit dem ESP8266 Entwicklungsboard – Stromversorgung
Roboter bauen mit dem ESP8266 Entwicklungsboard – Bauteile
Roboter bauen mit dem ESP8266 Entwicklungsboard – Chassis
Roboter bauen mit dem ESP8266 Entwicklungsboard – Verkabelung Teil 1
Roboter bauen mit dem ESP8266 Entwicklungsboard – Verkabelung Teil 2
Roboter bauen mit dem ESP8266 Entwicklungsboard – Arduino Entwicklungsumgebung einrichten
Roboter bauen mit dem ESP8266 Entwicklungsboard – Ultraschall Sensor und Motorensteuerung
Roboter bauen mit dem ESP8266 Entwicklungsboard – WIFI Fernsteuerung
Roboter bauen mit dem ESP8266 Entwicklungsboard – Servo Motor Steuerung
Roboter bauen mit dem ESP8266 Entwicklungsboard – OLED Display
Roboter bauen mit dem ESP8266 Entwicklungsboard – Magnetometer
Roboter bauen mit dem ESP8266 Entwicklungsboard – GPS Empfänger Einführung
Artikel Ausblick:
Roboter bauen mit dem ESP8266 Entwicklungsboard – GyroskopRoboter bauen mit dem ESP8266 Entwicklungsboard – GPS Wegpunkte
Roboter bauen mit dem ESP8266 Entwicklungsboard – Solarzelle












Recent Comments