


Batteriehalter für Real Time Clock auflöten
Der Batteriehalter geht recht einfach fest zu löten. Das Blech bei meinen Haltern ist recht dünn und lässt sich sehr gut mit dem Lötkolben erhitzen. So habe ich zu erst an die beiden Füßchen links und rechts auf die Unterseite Lötzinn aufgetragen. Anschließend habe ich den Batteriehalter auf die Platine gelegt, mit dem Zeigefinger fest angedrückt und eines der beiden Füßchen heiß gemacht bis der Lötzinn geschmolzen ist und richtig flüssig war. Bei meinem Jetson Nano war schon Lötzinn auf den Pads vorhanden der dann mit geschmolzen ist und so hatte ich das erste Füßchen richtig fest mit der Platine verbunden. Beim zweiten Füßchen bin ich gleich vorgegangen.
Fest angelötet sieht der Batteriehalter jetzt wie folgt gezeigt aufgelötet aus.
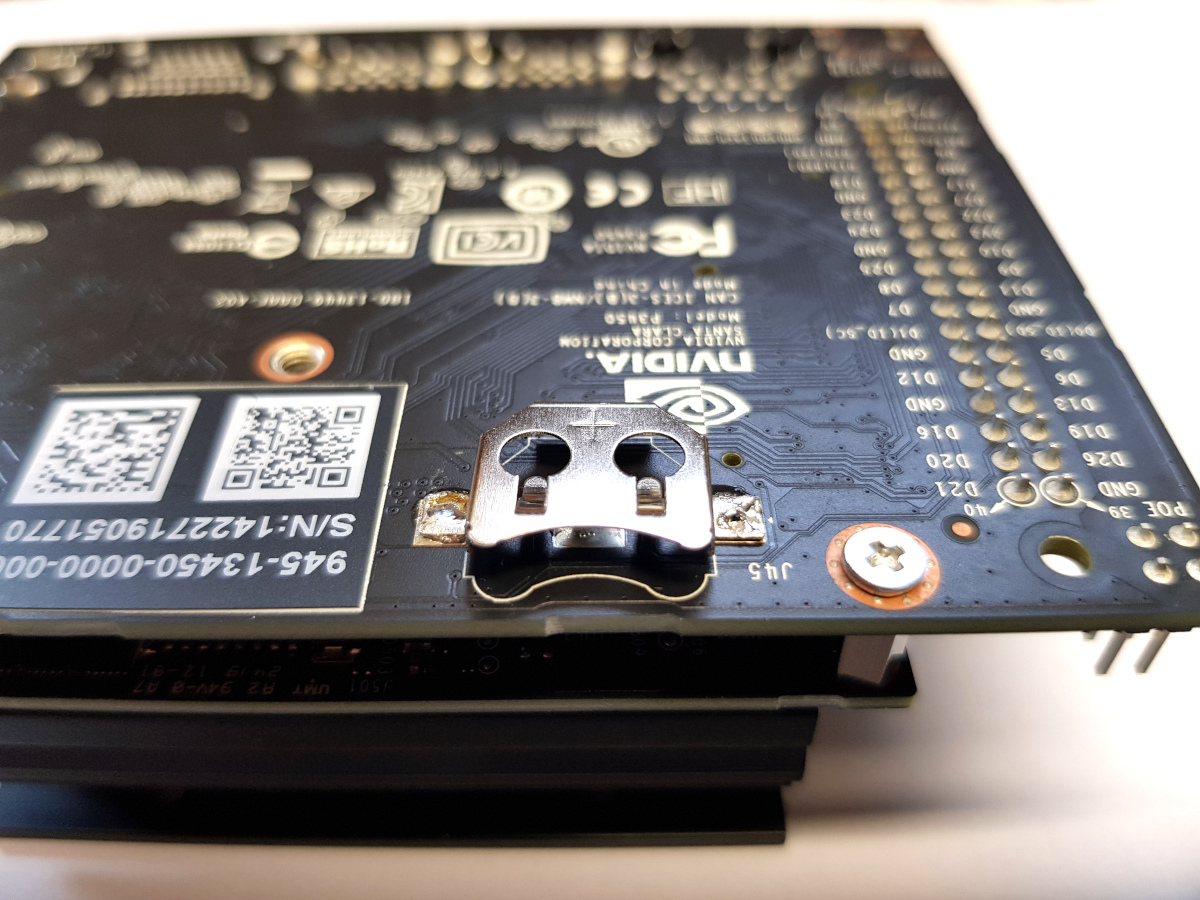
NVIDIA Jetson Nano Real Time Clock RTC Battery Socket soldered to the PCB
Jetzt werden noch die passenden Batterien benötigt. Ich habe mir CR1225 Batterien gekauft.
Hinweis neue Board Version
Mich haben immer wieder Nachrichten erreicht, dass der Jetson Nano trotz aufgelöteter Batterie die Uhrzeit nicht behält. Das liegt an einem neuen Boarddesign und es wird noch eine einfache Diode benötigt oder ein Kondensator der aufgeladen werden kann. Wird eine Diode vom Typ BAT54H eingebaut kann auch wieder eine Batterie verwendet werden da dann über die Diode der Ladestrom nicht zurück zur Batterie kommt. Wird ein Super-Kondensator verbaut so kann dieser geladen werden. Dann allerdings muss statt der Diode eine Drahtbrücke eingelötet werden.
Das nochfolgende Bild erklärt wie die Diode eingebaut werden muss um die in diesem Artikel beschriebene Battereie verwenden zu können.
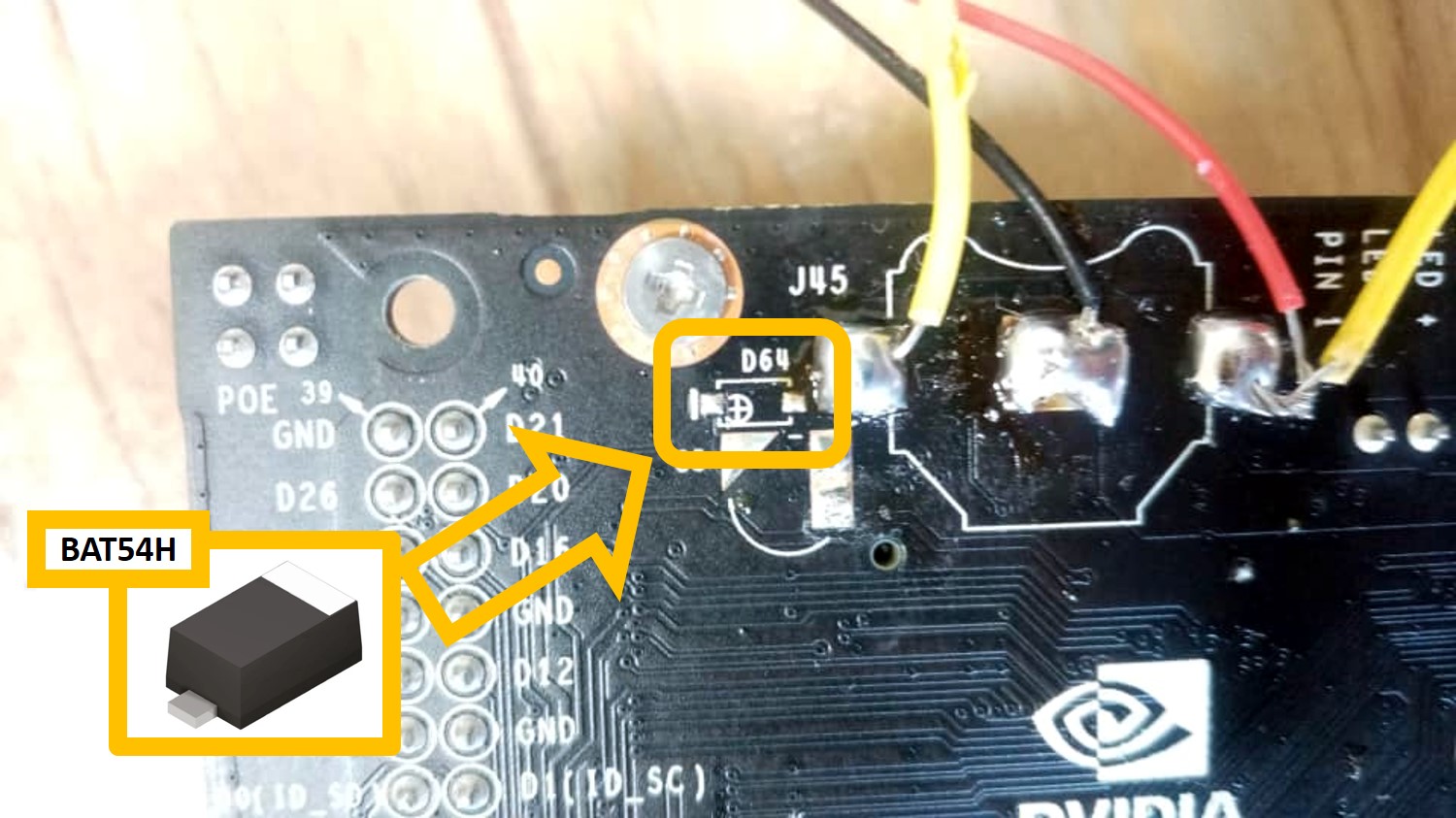
Jetson Nano BAT54H Diode
Batterie einlegen und Real Time Clock Zeit prüfen
Die CR1225 passt sehr gut in den Batteriehalter. Die Batterie sitzt fest und kann nicht mehr heraus rutschen. Viel mehr muss man jetzt auch nicht mehr machen und der Jetson Nano kann eingeschalten werden. Das folgende Bild zeigt meine Jetson Nano von unten mit der eingesteckten Batterie.
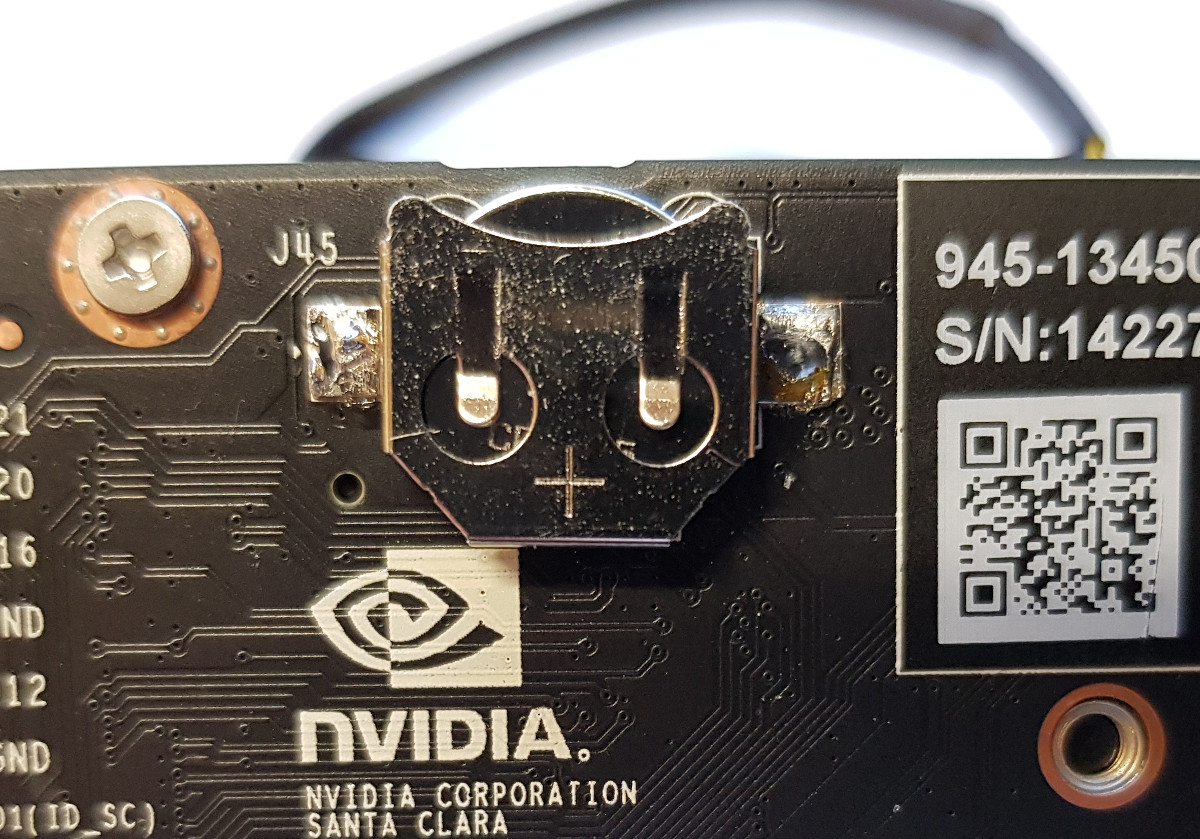
NVIDIA Jetson Nano Real Time Clock RTC Battery Socket CR1225
Die spannende Frage ist jetzt natürlich ob alles klappt. Ich habe den Jetson Nano hoch gefahren und habe mir die Uhrzeit der RTC mit dem folgenden Befehl anzeigen lassen.
Befehl: timedatectl
Gut zu erkennen ist einmal die Uhrzeit des Systems ansich und die Uhrzeit der Real Time Clock. Beide Uhren laufen synchron mit dem unterschied das die RTC und die Systemzeit abhängig von der Ländereinstellung, bei mir für Deutschland 2 Stunden, versetzt laufen.

NVIDIA Jetson Nano Real Time Clock display
Ich habe anschießend den Jetson Nano herunter gefahren und über Nacht liegen lassen. Vor dem nächsten Einschalten habe ich dann den USB WIFI Dongle abgezogen damit das Betriebssystem keine Möglichkeit hat sich die aktuelle Zeit über das Internet zu laden.
Das Ergebnis war eine absolut bis auf die Sekunde passende Uhrzeit meines Systems. Damit bin ich jetzt sehr zufrieden und kann meine weiteren Jetson Nanos ebenfalls umbauen. Sehr schön ist, dass ich keine Einstellungen am Betriebssystem vornehmen musste und die RTC direkt funktioniert hat.
Zusammenfassung
Die meiste Zeit hatte ich aufwenden müssen um zu verstehen wie ich den Jetson Nano mit einer Real Time Clock (RTC) ausrüsten kann. Als ich dann verstanden hatte, dass bereits eine Real Time Clock im Jetson Nano verbaut ist und auf der Platine die Anschlüsse für eine Stromversorgung des Boards mit einer kleinen Batterie vorhanden ist habe ich mir die entsprechenden Halterungen gekauft. Etwas Sorgen haben mir noch die Lötarbeiten gemacht aber diese klappten erstaunlich gut. So hatte ich für das Auflöten der Halterungen gerade mal ca. 10 Minuten benötigt.
Ich bin mit dem Ergebnis sehr zufrieden und es ist einfach klasse das ich für wenig Geld mit etwas löten die RTC des Jetson Nano jetzt nutzen kann. Endlich verlieren meine Donkey Cars nicht mehr die Zeit wenn ich ohne Internetverbindung mit den Autos IT Trainings begleite oder für mich im Freien Trainingsdaten aufzeichne.
Hier geht es zum ersten Teil (NVIDIA Jetson Nano Real Time Clock (RTC) – Teil 1) meiner beiden Berichte.












Moin! Magst Du eine Artikelnummer von dem Batteriehalter verraten? 🙂
Hi Patrick,
das ist ein Halter für eine CR1225 Batterie. Eine Artikelnummer habe ich leider nicht dafür.
Viele Grüße,
Maker