

Ich habe mir ein neues Donkey Car auf Basis des Tamiya CC-01 Fahrwerkes aufgebaut. Die Idee war ein robustes Donkey Car zu bauen mit dem ich auch im freien fahren kann. Auch kann das Modell im Büro oder der Wohnung mal mit der Wand oder einem Stuhl zusammen stoßen ohne das gleich etwas kaputt geht. Da ich ein fertig aufgebautes Modell vor einem in Einzelteilen bevorzugt habe entschied ich mich für einen Unimog 406. Das ist für mich auch das klassische UNIMOG Modell das mir vom Design sehr gut gefällt.
Neben dem Modell UNIMOG von Tamiya war mir auch wichtig, dass ich die Kamera in einer günstigen Position ca. 20cm über dem Boden befestigen konnte ohne dass der Aufbau die Optik des Modells wesentlich stört. Auch ist unter dem Gehäuse sehr viel Platz für die Elektronik wie einem Raspberry Pi Computer, Servo-Kontroller und Spannungswandler. All diese Komponenten konnte ich ohne Probleme auf einer Pappe befestigen und einbauen.
Das folgende Bild zeigt meinen fertig umgebauten UNIMOG. Somit ist dieser wohl der erste Mercedes UNIMOG seiner Art der autonom fährt.

Donkey Car – Mercedes UNIMOG front camera
Komponentenliste
Die Komponenten die für den Bau eines Donkey Cars notwendig sind führe ich nachfolgend auf. Neben dem Raspberry Pi und der Raspberry Pi Kamera werden noch ein paar weitere Bauteile benötigt. Damit diese einfach bezogen werden können habe ich nachfolgend die Komponentenliste aus dem Amazon Onlineshop zusammen gestellt.
Diese Komponentenliste ist über den folgenden Link aubrufbar:
Autonom fahrendes Raspberry Pi KI Roboter-Auto – Elektronik Donkeycar
Weiter werden neben diesen Komponenten noch Kabel benötigt sowie ein Metallband um die Kamera am Rammbügel des UNIMOGs zu befestigen. So ist es dann möglich sein eigenes Donkey Car aus einem fertigen Read-to-Run Tamiya Modell zu bauen.

Donkey Car – Mercedes UNIMOG right side
Umbau
Ich habe etwas hin und her probiert und habe am Ende mir eine Pappe zurecht geschnitten die in der Mitte des Modells über dem Fahrtenregler und Motor ihren Platz gefunden hat. Auf der Pappe befestigt habe ich dann den Raspberry Pi 3 Modell B+, den Servo-Kontroller PCA9685 sowie den Spannungswandler. Verbunden habe ich dann den Servo Kontroller mit dem Raspberry Pi mit den Jumper Kabeln. Den Strom für den Step-Down Konverter habe ich durch anlöten von zwei Kabeln am Motor-Stecker mir abgezweigt.
Das nachfolgende Bild zeigt das Tamiya CC-01 Fahrwerk und die Elektronik.
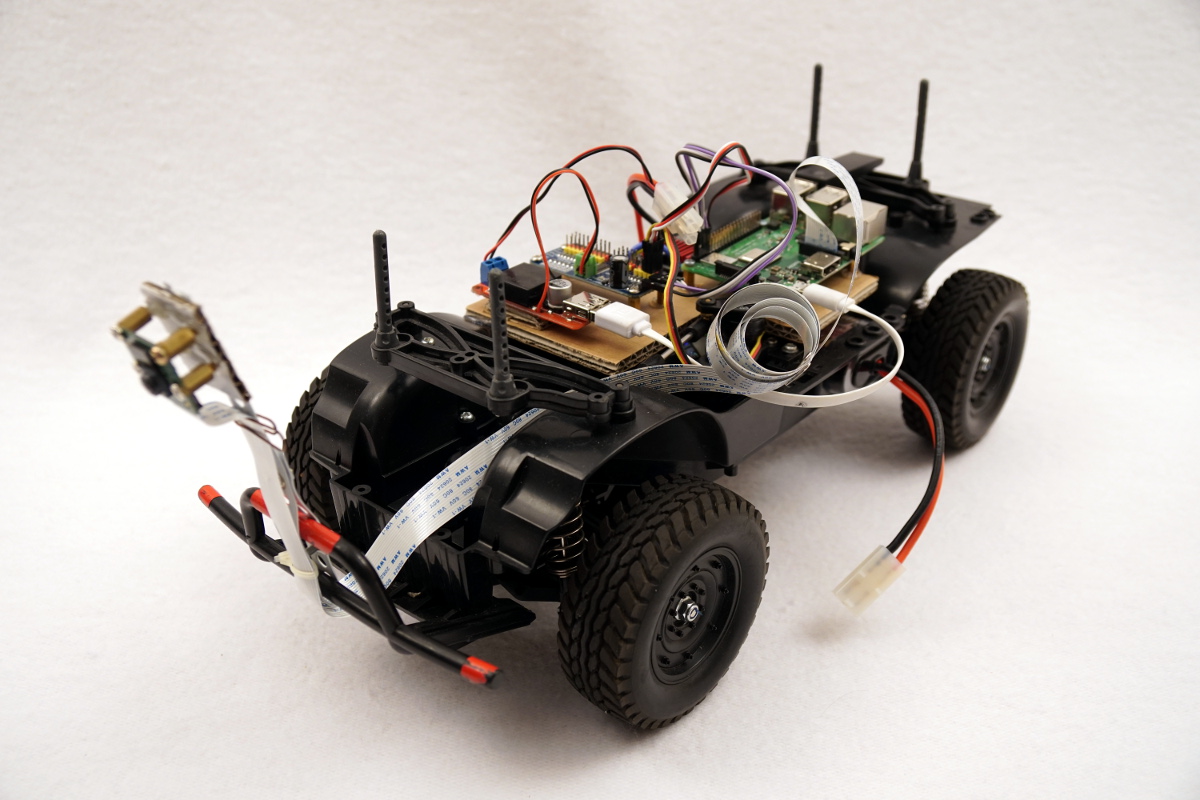
Donkey Car – Mercedes UNIMOG electronics
Hier noch eine Nahaufnahme der einzelnen Komponenten. Gut zu erkennen ist auch der Sony Playstation Adapter um den Dualshock Controller via Funk mit dem Raspberry Pi verbinden zu können. Ich habe mir diese Lösung zugelegt da die Kopplung so ganz einfach möglich ist.
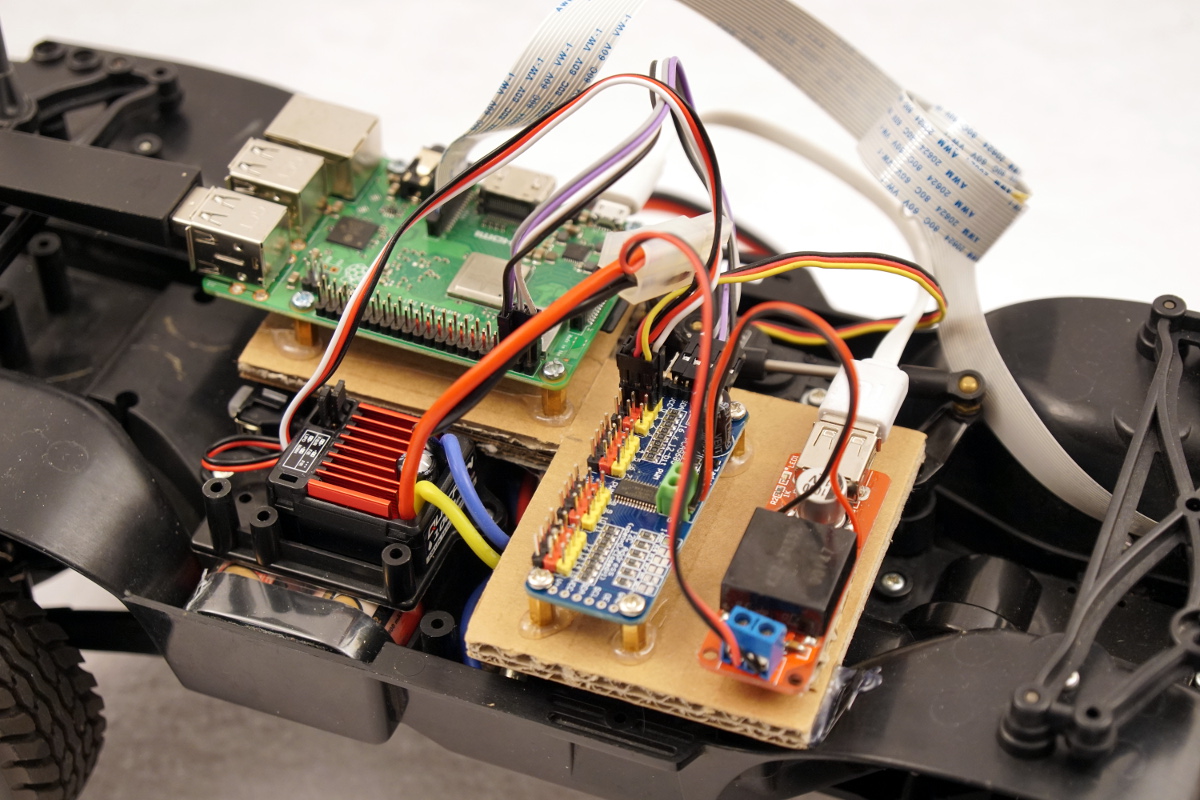
Donkey Car – Mercedes UNIMOG electronics in detail
Hier noch ein Bild von meinem UNIMOG von Hinten. Gut zu sehen ist die Lichtanlage die eingebaut ist. Das gibt dem Modell noch ein deutlich besseres aussehen.

Donkey Car – Mercedes UNIMOG back
Fazit
Ich bin sehr zufrieden mit meiner Wahl des Modells. Tamiya baut sehr hochwertige RC Modelle und ich konnte den Servo und Fahrtenrgler ohne Probleme am Servo-Kontroller anschließen. Auch funktionierte die Kalibrierung tadellos und ich konnte mich auf das Einrichten des Donkey Car Frameworks konzentrieren. Daher kann ich dieses Modell als Ready to Run Variante nur allen empfehlen die mehr an der Software interessiert sind als am Basteln. Auch gefällt mir das das Modell so absolut stabil ist. So kann der UNIMOG schon mal mit voller Geschwindigkeit gegen die Wand fahren wenn das Neuronale Netz einen Fehler macht ohne das gleich etwas kaputt geht.
Artikel Übersicht Donkeycar Roboter Auto:
Autonom fahrendes Raspberry Pi KI Roboter-Auto – EinleitungAutonom fahrendes Raspberry Pi KI Roboter-Auto – Chassis
Autonom fahrendes Raspberry Pi KI Roboter-Auto – Elektronik
Autonom fahrendes Raspberry Pi KI Roboter-Auto – Software Installation
Autonom fahrendes Raspberry Pi KI Roboter-Auto – Kalibrierung
Autonom fahrendes Raspberry Pi KI Roboter-Auto – Trainings Vorbereitungen
Autonom fahrendes Raspberry Pi KI Roboter-Auto – Trainingsdaten aufzeichnen
Autonom fahrendes Raspberry Pi KI Roboter-Auto – das Neuronale Netz trainieren
Autonom fahrendes Raspberry Pi KI Roboter-Auto – Donkeycar training in einem Docker Container (optional)
Autonom fahrendes Raspberry Pi KI Roboter-Auto – Donkey Car UNIMOG Upgrade
Autonom fahrendes Raspberry Pi KI Roboter-Auto – Manuelle Short Keys
Autonom fahrendes Raspberry Pi KI Roboter-Auto – IMU Sensor 9-DOF absolute Orientation
Autonom fahrendes Nvidia Jetson Nano AI Roboter-Auto – Vorbereitung
Autonom fahrendes Nvidia Jetson Nano AI Roboter-Auto – Software Installation
Autonom fahrendes Nvidia Jetson Nano AI Roboter-Auto – Konfiguration des Donkey Car Frameworks












Recent Comments