


Nachdem alle elektronischen Komponenten im frisch aufgebauten Chassis untergebracht sind, geht es in diesem Beitrag um die OpenBot Verkabelung. Die Verkabelung ist zwar grundsätzlich einfach, erfordert aber dennoch etwas Konzentration – vor allem, wenn man zum ersten Mal ein solches Projekt umsetzt. Wichtig ist, dass man ruhig und sorgfältig arbeitet. Jede Verbindung sollte lieber ein zweites oder drittes Mal überprüft werden, um Kurzschlüsse zu vermeiden. Diese könnten dazu führen, dass Bauteile beschädigt werden oder sogar Rauch aufsteigt.
Daher gehen wir jetzt Schritt für Schritt vor und verkabeln alle Komponenten der Reihe nach.
Stromversorgung herstellen
Die Stromversorgung erfolgt über drei 18650 LiPo-Batterien, die in Reihe geschaltet werden. Diese liefern genügend Spannung und Kapazität, um das Roboter-Auto lange mit Energie zu versorgen. Dank eines Batteriehalters ist die Stromzufuhr schnell eingerichtet. Sehr empfehlenswert ist ein Schalter, der die Verbindung zur Batterie trennt. So kann das Roboter-Auto bequem ein- und ausgeschaltet werden, ohne die Batterien entnehmen oder Kabel abziehen zu müssen.
Das folgende Bild zeigt, wie die Batterie mit dem Motortreiber verbunden ist. Rechts im Bild befindet sich die zentrale Stiftleiste zur Stromverteilung (5V und GND), gespeist vom L298N-Motortreiber. Diese Leiste eignet sich hervorragend zur Versorgung weiterer Komponenten wie Ultraschallsensor oder OLED-Display.
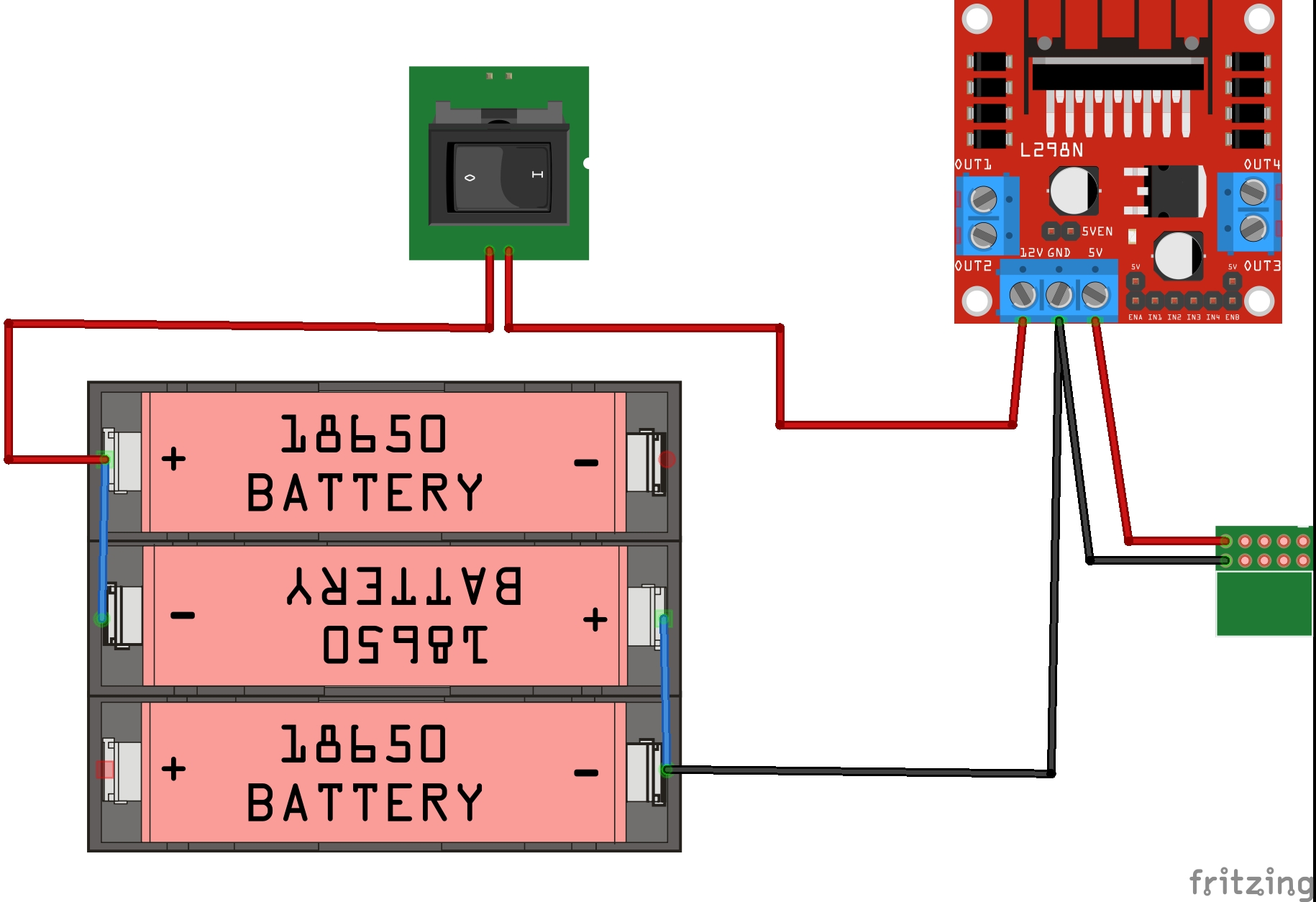
OpenBot power supply
Motortreiber am Arduino Nano anschließen
Der Motortreiber wird über vier Jumper-Kabel (Female-to-Female) mit dem Arduino Nano verbunden. Dabei gilt:
| Pin Motortreiber | Pin Arduino Nano |
|---|---|
| IN1 | D5 |
| IN2 | D6 |
| IN3 | D9 |
| IN4 | D10 |
Nach dem Anschluss sind Arduino und Motortreiber logisch miteinander verbunden.

OpenBot Arduino Nano L298 H-Bridge
Ultraschallsensor anschließen
Der Ultraschallsensor benötigt zwei Datenleitungen und eine Stromversorgung:
| Ultraschallsensor | Arduino Nano |
|---|---|
| TRIG | D12 |
| ECHO | D11 |
GND und 5V werden über die zentrale Stromverteilung angebunden.
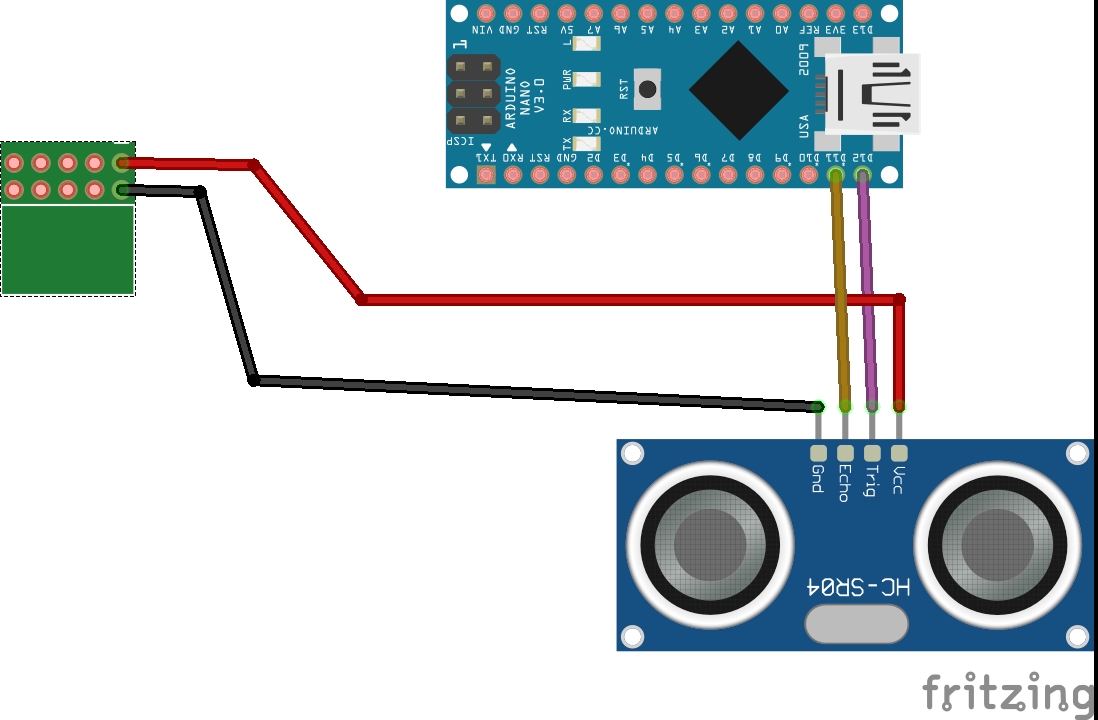
OpenBot ultrasonic sensor
Drehzahlmesser am Arduino Nano anschließen
Diese Funktion wird nachgeliefert. Weitere Infos gibt es bis dahin auf der OpenBot Webseite.
LEDs für Richtungsanzeige
Auch dieser Abschnitt folgt später. Siehe ebenfalls die OpenBot Webseite.
OLED-Display (SSD1306) über I2C anschließen
Das OLED-Display wird mit vier Kabeln an den I2C-Bus des Arduino Nano angeschlossen:
| OLED Display | Arduino Nano |
|---|---|
| SDA | A4 |
| SCL | A5 |
Die Stromversorgung erfolgt ebenfalls über den Stromverteiler (GND und 5V).
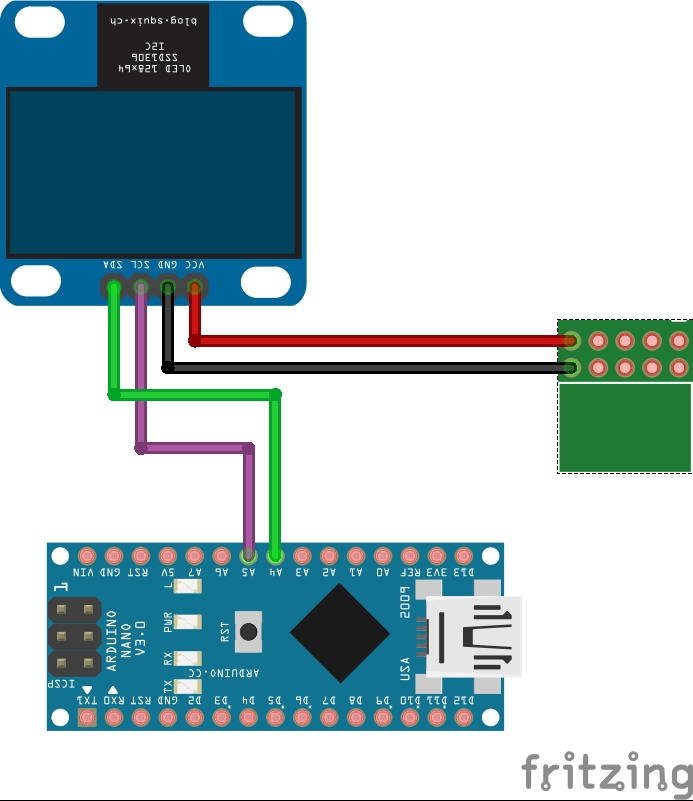
OLED-Display wiring
Getriebemotoren verkabeln
Die vier Getriebemotoren werden jeweils paarweise am L298N Motortreiber angeschlossen: linke und rechte Seite getrennt. Da die Motoren spiegelbildlich eingebaut werden, müssen die Kabel der rechten Seite über Kreuz angeschlossen werden, damit sich alle Motoren in die gleiche Richtung drehen.
Hinweis: Falls sich die Motoren beim Testlauf nicht gleichmäßig drehen, hilft meist das Tauschen der Kabel an einer Seite.
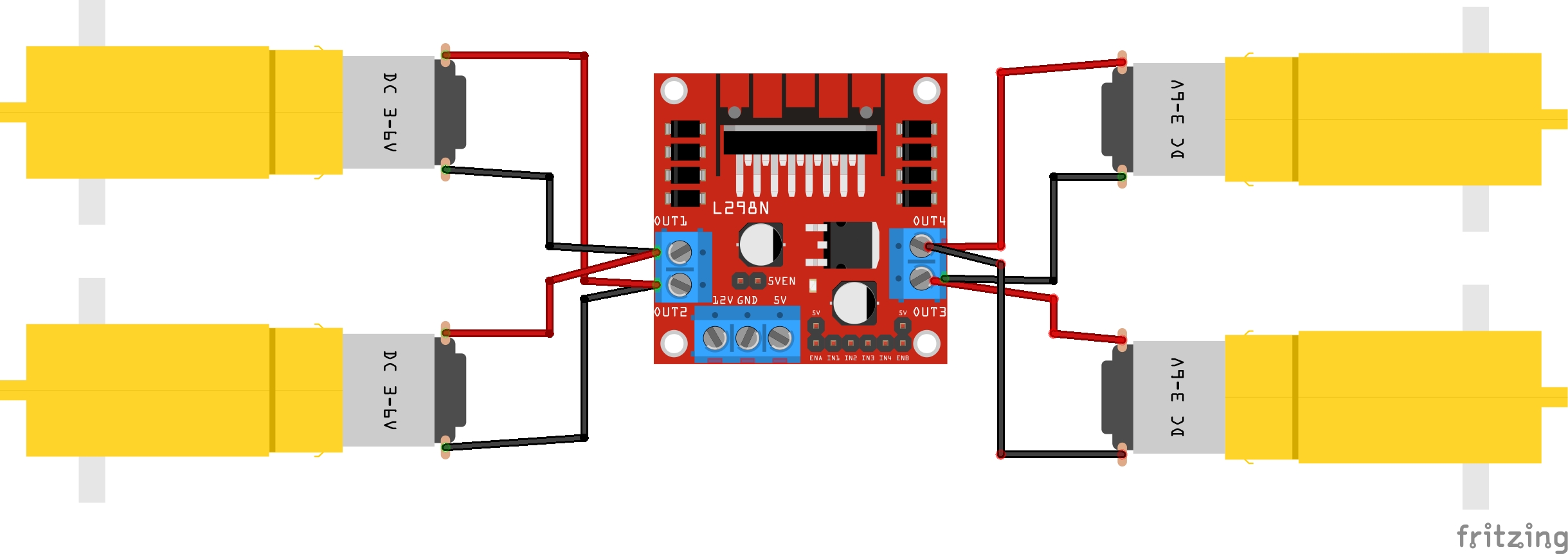
L298N gear motor wiring
Zusammenfassung zur OpenBot Verkabelung
Die OpenBot Verkabelung ist nun abgeschlossen. Je nach Ausstattung (OLED, LEDs, Drehzahlsensoren) kann es zu kleinen Unterschieden kommen. Wer sich Zeit nimmt und systematisch vorgeht, sollte problemlos ans Ziel kommen. Im nächsten Beitrag geht es um das Aufspielen der Firmware auf den Arduino Nano.
Artikel Übersicht OpenBot Roboter Auto:
OpenBot – Dein Smartphone wird zu einem autonomen Roboter Auto – EinleitungOpenBot – Dein Smartphone steuert ein Roboter Auto – benötigte Bauteile Teil 1-2
OpenBot – Dein Smartphone steuert ein Roboter Auto – benötigte Bauteile Teil 2-2
OpenBot – Dein Smartphone steuert ein Roboter Auto – Chassis bauen
OpenBot – Dein Smartphone steuert ein Roboter Auto – Verkabelung
OpenBot – Dein Smartphone steuert ein Roboter Auto – Arduino Firmware aufspielen
OpenBot – Dein Smartphone steuert ein Roboter Auto – Android App und erster Probelauf
OpenBot – Dein Smartphone steuert ein Roboter Auto – Trainingsdaten aufzeichnen
OpenBot – Dein Smartphone steuert ein Roboter Auto – Trainingsumgebung einrichten
OpenBot – Dein Smartphone steuert ein Roboter Auto – das neuronale Netz trainieren
OpenBot – Dein Smartphone steuert ein Roboter Auto – Android Studio und Smartphone einrichten
OpenBot – Dein Smartphone steuert ein Roboter Auto – die eigene OpenBot Android App erstellen












Recent Comments