

Alle nachfolgend aufgeführten Komponenten von Raspberry Pi, Kamera bis zum Servo Kontroller werden für alle drei aufgebauten Modelle gleichermaßen benötigt. Einzig und allein wird der Fahrtenregler nur gebraucht wenn noch keiner bei dem Modell dabei ist. Ideal ist auch der 3D gedruckter Aufbau, an dem die Kamera und den Raspberry Pi befestigt wird, der auf der Donkey Car Seite angeboten wird. Bei meinem Modell aus China habe ich probehalber alle Komponenten auf die Pappe die ich für das Gehäuse verwenden werde gelegt und erst einmal probiert wie ich alles unterbekomme. Bei dem CC-01 Chassis ist so viel Platz vorhanden, dass es sehr leicht ist die Komponenten im Modell unterzubringen und zu befestigen. Bei dem original Donkey Car aus Hong Kong wird wieder der 3D gedruckter Aufbau benötigt der aber perfekt auf das Fahrwerk passt und befestigt werden kann.
Das folgende Bild zeigt mein erstes Donkey Car fertig aufgebaut. Es sind die vielen Kabel gut zu erkennen die ich verbauen musste.
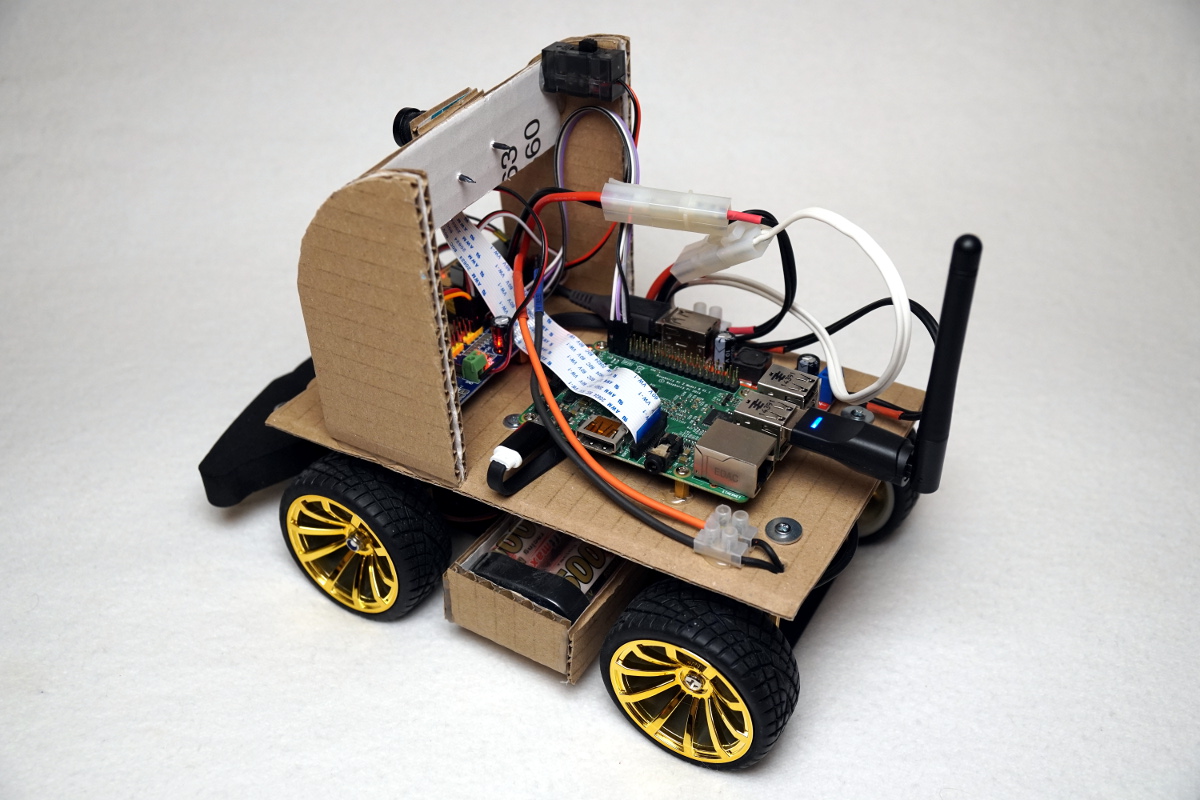
Autonom fahrendes Raspberry Pi KI Roboter Auto – Hardware
Im folgenden Abschnitt stelle ich die Komponenten vor die ich verbaut habe. Als optional ist der Fahrtenregler markiert da dieser abhängig vom Modell nicht unbedingt benötigt wird.
Komponentenliste
Raspberry Pi 3 Model B+
Der Raspberry Pi 3 Model B+ wird benötigt um das trainierte Neuronale Netz bzw. den Piloten ausführen zu können und um die Trainingsdaten wie Lenkbewegung und Bilder aufzuzeichnen. Wichtig ist hier auf das B+ zu achten da man für ein paar Euro mehr auch etwas mehr an Leistung erhält.

Micro SD-Karte
Die Micro SD-Karte wird benötigt um auf dieser das Betreibssystem zu installieren. Auch sollte diese Karte nicht zu langsam sein und genug Speicherplatz bieten um die Trainingsdaten abspeichern zu können. Das Betriebssystem vorkonfiguriert gibt es schon fertig als Donkey Car Image zum herunter laden. Mehr dazu dann in einem extra Post in dem es um die Software und Installation des Donkey Cars geht.

Raspberry Pi Kamera
Damit ein Bild der Strecke aufgenommen werden kann sollte eine Raspberry Pi Kamera eingesetzt werden. Ich habe eine Weitwinkelkamera für mein Donkey Car besorgt. Mit der Raspberry Pi Kamera bedarf es keiner allzu großen Konfiguration dieser und die Datenrate über das CSI Kabel ist auch wesentlich flotter als über den USB Anschluss bei einer USB Kamera.

Tamiya RtR Unimog
Als Chassis empfehle ich den Tamiya RtR Unimog auf Basis des CC-01 Fahrwerkes. Dieses Fahrwerk ist sehr stabil und übersteht auch mehrere Unfälle wie z. B. mit top Speed in eine Wand zu fahren. Auch bietet es sehr viel Platz und die Elektronik lässt sich ganz einfach zu einem Donkey Car umbauen.

PCA9685 Servo Kontroller
Der PCA9685 Servo Kontroller wird benötigt um den Lenkservo und den Fahrtenregler (ESC) im umgebauten RC Auto ansteuern zu können.

Step-Down Konverter
Um den Raspberry Pi mit Strom zu versorgen habe ich mir noch einen Step-Down Konverter gekauft mit zwei USB Anschlüssen. An einem USB Ausgang ist der Raspberry Pi angeschlossen und an dem anderen ein abgeschnittenes USB Kabel anschließen und so die 5V / GND (rotes / schwarze Kabel) abgreifen. Dieses versorgt den Servo-Kontroller mit 5V.

OLED Display
Mit dem OLED Display können Informationen wie z. B. die IP-Adresse oder die Belegung des Speichers auf der micro SD-Karte angezeigt werden. Diese Informationen helfen sehr bei der Fehlersuche falls z. B. keine IP-Adresse zugewiesen wird.

PlayStation 4 – DualShock
Der DualShock 4 CUH-ZCT1/E Wireless Controller ist ideal für die Steuerung des Donkey Cars. Über einen USB-Funkadapter kann der Controller ohne Probleme mit dem Raspberry Pi verbunden werden. Generell sollten die Trainingsdaten meiner Empfehlung nach nur mit einem Gamepad aufgezeichnet werden um qualitativ hochwertige Daten für das Training des Neuronalen Netzes zu erzeugen.
DualShock 4 USB Wireless Adaptor
Damit der DualShock4 Controller mit dem Raspberry Pi verbunden werden kann wird dieser Funkadapter noch zusätzlich benötigt. Dieser wird einfach in einen freien USB Steckplatz gesteckt und mehr ist nicht notwendig damit dieser von Raspbian als Betriebssystem erkannt wird. Anschließend noch den DualShock 4 Controller mit dem USB Funkadapter verbinden und das war schon alles an Konfigurationsaufwand.

Akku 5.000 mAh (Empfohlen)
Als Akku verwende ich immer 5.000 mA Akkus aus dem Modellbau. Diese haben ausreichend Leistung um das Roboter Auto mit Energie zu versorgen. Also den Antriebsmotor und den Raspberry Pi. So benötige ich nur einen Akku und nicht verschiedene die sonst wieder zu Problemen führen würden.
Ladegerät (Empfohlen)
Zu diesem Akku habe ich mir noch das folgende Ladegerät gekauft. Es lädt mit den 4A die Akkus sehr schnell und zuverlässig auf.

Fahrtengregler (Optional)
Für die Ansteuerung des DC Motors wird ein klassischer Modellauto Fahrtengregler benötigt wenn Sie sich nicht ein Modell gekauft haben bei dem schon ein Fahrtenregler vorhanden ist. Ich habe mir ein ganz günstiges Modell aus China gekauft das für RC Autos mit Bürstenmotor gedacht ist. Mit diesem Modell habe ich gute Erfahrungen gemacht und konnte es ohne Probleme mit einem PCA9685 Servo-Kontroller und Python ansteuern.
Weiter werden noch diverse Kabel benötigt und z. B. ein Micro USB-Kabel um den Raspberry Pi mit Strom zu versorgen.
RC Modell Fahrtenregler – einfaches China Fahrwerk
Der günstige Fahrtenregler aus China reicht völlig aus um den kleinen Motor des China Chassis mit Energie zu versorgen. Das Roboter Auto fährt richtig flott los und die Geschwindigkeit lässt sich gut regeln. Auch das Zurückfahren klappt und der Ein/Aus Schalter am Fahrtenregler gibt dem ganzen Roboter Auto auch noch ein gewisses Maß an Sicherheit gegen versehentliches losfahren auf dem Schreibtisch.
Hinweis: Wichtig zu beachten ist, dass der Fahrtenregler für RC Autos gedacht ist also dass das Auto auch rückwärtsfahren können muss. Dann gibt es noch Bürsten und Bürsten lose Motoren für diese gibt es wieder unterschiedliche Fahrtenregler. Ob es ein Fahrtenregler für Motoren mit oder ohne Bürsten ist spielt aber bei der Ansteuerung des Fahrtenreglers mit dem Servo Kontroller später keine Rolle.
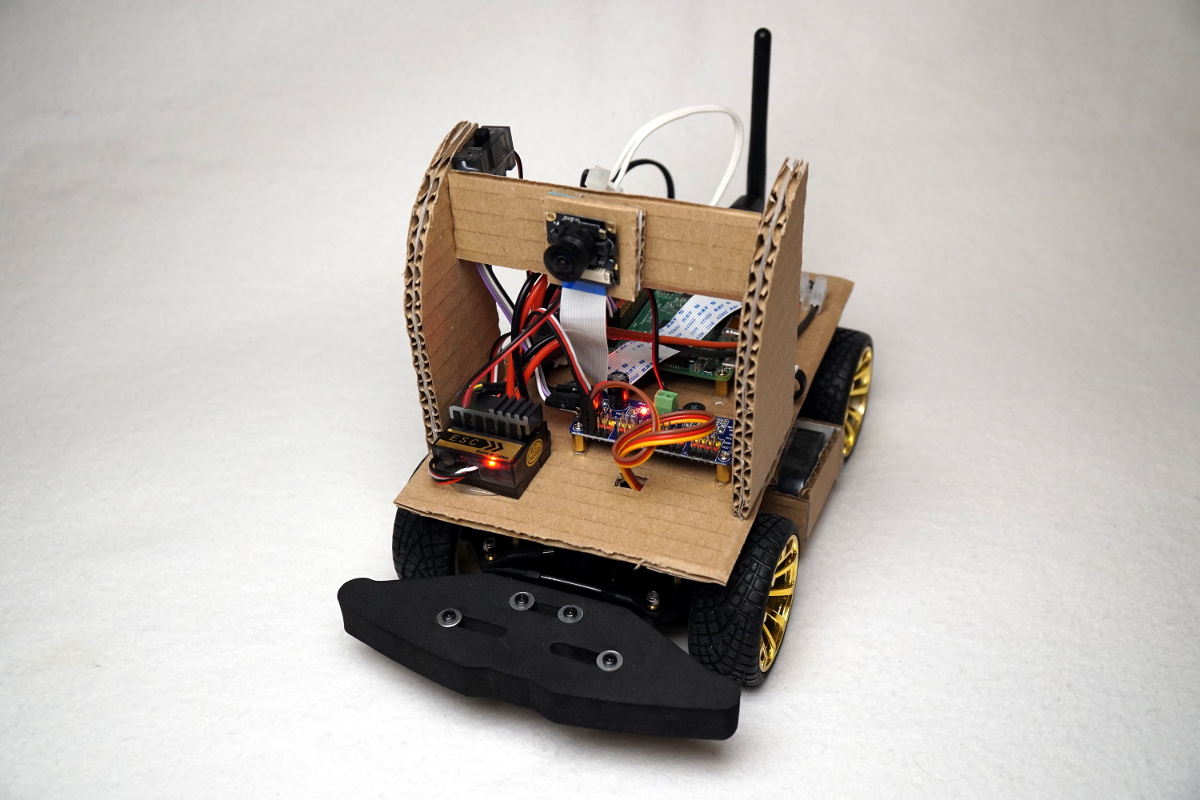
Autonom fahrendes Raspberry Pi KI Roboter Auto – ESC Fahrtenregler montiert
Hier ist links der Fahrtenregler zu sehen und rechts davon der PCA9685 Servo Kontroller für die Ansteuerung des Fahrtenreglers und des Servomotors für die Lenkung.

Autonom fahrendes Raspberry Pi KI Roboter Auto – ESC Fahrtenregler
Auf meinem Chassis und dem Pappe Aufbau habe ich alle Komponenten ganz gut untergebracht. Viel Platz war nicht mehr und ich hätte den Raspberry Pi noch mindestens 1 cm weiter in die Mitte also weg vom Rand montieren sollen. Denn jetzt steht der Micro USB-Stecker für die Stromversorgung etwas über.
Stromversorgung 5.000 mAh Akku
Für die Stromversorgung meiner drei Modelle habe ich einen RC Akku mit 7,2V und 5.000 mAh genommen wie in der Hardwareliste empfohlen. Dieser ist ideal für einen Betrieb von ca 1/2 Std fahrt oder gut und gerne 2 Std. Betrieb des Modells mit Raspberry Pi und live Video Streaming. Wenn ich nur den Raspberry Pi laufen lassen ohne Last auf dem System dann reicht der Akku für einen Betrieb von 4 bis 5 Std. Leider kann ich es nicht genauer angeben aber für meine Versuche in ähnlichen Roboter Autos hat der Akku immer sehr gut gereicht um alles testen zu können.

Autonom fahrendes Raspberry Pi KI Roboter Auto – Akku
Zusammenfassung
Alle drei Modelle haben sich geeignet ein Donkey Car aufzubauen. Der RC Fahrtenregler ist für mich noch neu und ich hatte bis jetzt noch nie in einem Roboter Auto solch einen Fahrtenregler verbaut. In einem weiteren Artikel werde ich genauer auf diesen eingehen. Bis jetzt hat der Aufbau ganz gut geklappt aber ich war zu Beginn davon ausgegangen das ich etwas weniger löten und schrauben muss. Aber auch diese Arbeiten machen ja das Projekt aus. Generell empfehle ich mit meinen bis jetzt gesammelten Erfahrungen schon fertig aufgebaute RC Autos. Denn es soll ja das Neuronale Netz und autonome Fahren im Vordergrund stehen und nicht das löten, schrauben und basteln.
Artikel Übersicht Donkeycar Roboter Auto:
Autonom fahrendes Raspberry Pi KI Roboter-Auto – EinleitungAutonom fahrendes Raspberry Pi KI Roboter-Auto – Chassis
Autonom fahrendes Raspberry Pi KI Roboter-Auto – Elektronik
Autonom fahrendes Raspberry Pi KI Roboter-Auto – Software Installation
Autonom fahrendes Raspberry Pi KI Roboter-Auto – Kalibrierung
Autonom fahrendes Raspberry Pi KI Roboter-Auto – Trainings Vorbereitungen
Autonom fahrendes Raspberry Pi KI Roboter-Auto – Trainingsdaten aufzeichnen
Autonom fahrendes Raspberry Pi KI Roboter-Auto – das Neuronale Netz trainieren
Autonom fahrendes Raspberry Pi KI Roboter-Auto – Donkeycar training in einem Docker Container (optional)
Autonom fahrendes Raspberry Pi KI Roboter-Auto – Donkey Car UNIMOG Upgrade
Autonom fahrendes Raspberry Pi KI Roboter-Auto – Manuelle Short Keys
Autonom fahrendes Raspberry Pi KI Roboter-Auto – IMU Sensor 9-DOF absolute Orientation
Autonom fahrendes Nvidia Jetson Nano AI Roboter-Auto – Vorbereitung
Autonom fahrendes Nvidia Jetson Nano AI Roboter-Auto – Software Installation
Autonom fahrendes Nvidia Jetson Nano AI Roboter-Auto – Konfiguration des Donkey Car Frameworks












Recent Comments