


Noch ist der Roboter nicht fertig aufgebaut. An seinem Aussehen möchte ich noch arbeiten. Allerdings ist die Technik schon komplett verbaut. So läuft im Inneren ein Raspberry Pi 2 Model B. An dem Raspberry Pi ist das RasPiGNSS Modul angeschlossen sowie ein USB W-LAN Modul für die Steuerung des Roboters. Der BigRob kann autonom fahren sowie über eine Web-Oberfläche gesteuert werden. Für die Navigation greift der Roboter auf die DGPS Lösung zurück die ich im Garten aufgebaut habe. So kann er sehr genau navigieren.
Das nachfolgende Bild zeigt den BigRob einsatzbereit für den ersten Test im Freien mit Differential GPS. Die Basisstation für das Differential GPS ist aktuell auf dem Bild nicht zu sehen. Die Basisstation ist aber schon aufgebaut eine FIX Solution wurde berechnet.

Raspberry Pi Robot Car – Big Rob
Der Rober selber hat einen W-LAN Router Linksys WRT54GL eingebaut der den Accesspoint für die Steuerung bildet. Somit ist der BigRob sehr einfach einsatzbereit und die Kommunikation funktioniert sehr zuverlässig.
Raspberry Pi GNSS Navigation
Ich arbeite seit ca. November 2016 am Aufbau einer Differential GPS Lösung (DGPS) für meine autonomen Fahrzeuge. Diese besteht aus der Basisstation und dem Roboter als mobile Einheit. Wenn Ihr mehr darüber erfahren wollt habe ich hier in einer Artikelserie beschrieben wie die Differential GPS Lösung mit der RTK Bibliothek aufgebaut werden kann.
Link: Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – Einführung
Auf dem folgenden Bild ist die Technik im Big-Rob zu sehen. Links unten sitzt der RasPiGNSS GPS Empfänger und etwas rechts über diesem sitzt die GPS Antenne.
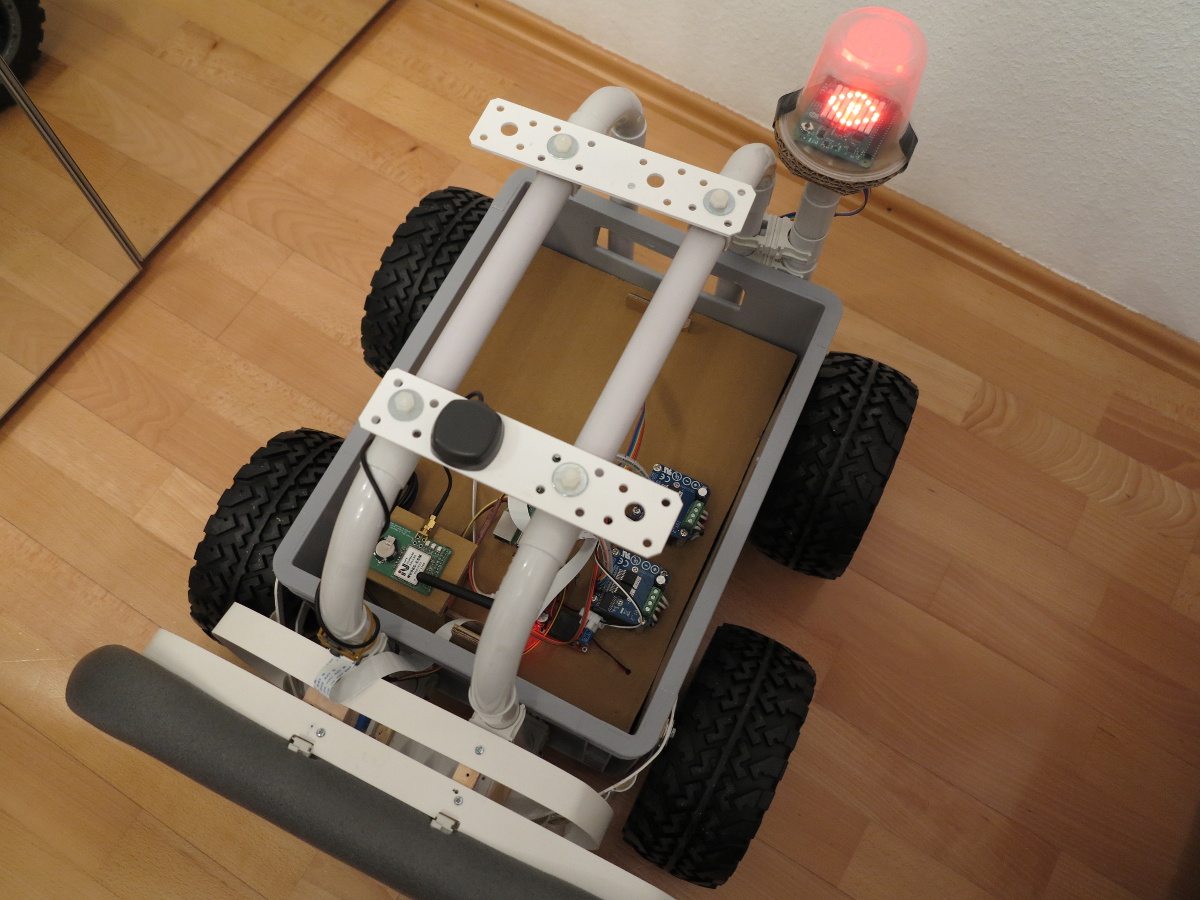
Raspberry Pi – Big Rob RasPiGNSS DGPS SenseHAT
Hinten am Fahrzeug (leuchtet rot) ist das Raspberry Pi Sense HAT verbaut. Diese benötige ich für die Ausrichtung des Roboters. Mit dem Magnetometer kann ich feststellen in welche Himmelsrichtung der Roboter ausgerichtet ist. Mit dem Gyroskop stellt mein Python Programm fest um wie viel Grad sich der BigRob gedreht hat.
Raspberry Pi Big Rob Video
Das Video zeigt den Big Rob Roboter wie er auf einer großen Wiese herum fährt. Allerdings zeigt das Video noch den Roboter wie er manuell gesteuert wird. Wenn ich ein Video habe in dem er autonom fährt stelle ich das natürlich hier auch online.

[DE_BOOK_DETAIL DE_BOOK_DETAIL=“DE_BOOK_DETAIL“]
Python Modul GPS NMEA Daten
Ich habe in der Vergangenheit immer eine GPS USB Maus verwendet. Diese arbeitet sehr gut mit dem Python GPS Modul zusammen. Die GPS Maus gibt an der USB Schnittstelle des Raspberry Pi einen NMEA Stream aus. Diesen konnte ich dann wiederum mit dem GPSD Dämon weiter verarbeiten.
Jetzt habe ich mein Programm umgestellt, damit es den GPS Stream der RTK Lösung verarbeiten kann. So kann ich auf einen hoch auflösenden Stream setzen und kenne die Position des Roboter Autos sehr genau.
Die Anpassung in meinem Python Programm war sehr einfach. Der NMEA Input-Stream kann direkt über einen TCP/IP Socket unter Python mit der Erweiterung PYNMEA eingelesen und ausgewertet werden. So ist es möglich den NMEA Stream der von dem Program RTKRCV erzeugt wird weiter unter Python zu verwenden.
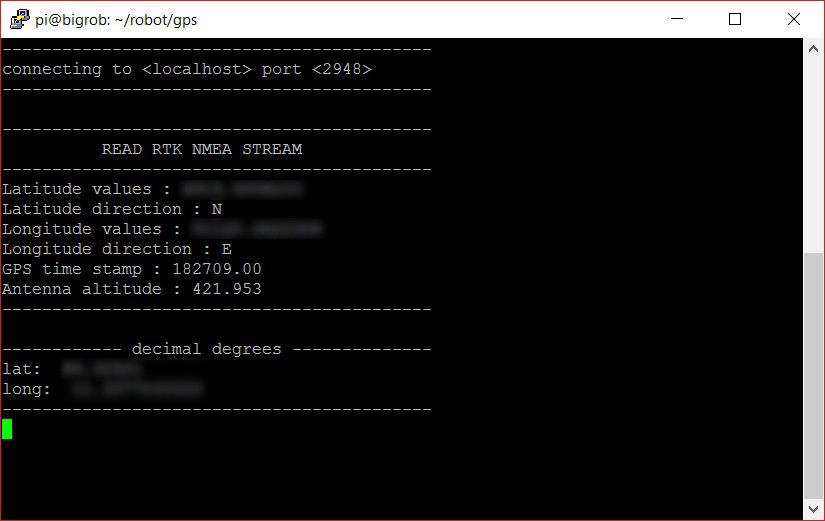
Python read RTK Stream
Damit PYNMEA auf dem Raspberry Pi installiert wird bitte den folgenden Befehl ausführen:
Befehl: sudo pip install pynmea
Das Programm welches den NMEA Stream einließt kann unter dem folgendne Link herunter geladen werden. Es ist die Basis für die weitere Verarbeitung in der Steuerung des Roboters.
Download: READ RTKRCV NMEA PYTHON STREAM
Zusammenfassung
Ich bin mit der Anpassung in meine Programm soeit zufrieden. Noch habe ich den Raspberry Pi Bot nicht im Freien getestet. Aber von den ersten Tests erwarte ich ein sehr gutes Ergebnis. Der technische Aufwand ist natürlich groß für eine differential GPS Lösung. Es hat auch etwas gedauert bis ich alles automatisch zum Laufen bekommen habe. Aber jetzt funktioniert die RTK Lösung sehr zuverlässig und ich muss beide RTK Stationen nur einschalten und es kann losgehen.
Artikelübersicht - Big Rob:
RASPBERRY PI ROBOTER – BIG ROB BAUANLEITUNGRASPBERRY PI ROBOTER – PEAK POWER PACK STROMVERSORGUNG
RASPBERRY PI ROBOTER – BIG ROB 4×4 ELEKTROMOTOR ANTRIEB
RASPBERRY PI ROBOTER – BIG ROB MOTORTREIBER BTS7960B UND SOFTWARE
RASPBERRY PI ROBOTER – BIG ROB OUTDOOR-KAMERAGEHÄUSE
RASPBERRY PI ROBOTER – BIG ROB mit differential GPS
RASPBERRY PI ROBOTER – BIG ROB ZÄHNE
RASPBERRY PI ROBOTER – BIG ROB FAHRWERK OPTIMIERUNG
RASPBERRY PI ROBOTER – BIG ROB modularer Aufbau 1-2
RASPBERRY PI ROBOTER – BIG ROB modularer Aufbau 2-2












Recent Comments