

Für den Big Rob Roboter hat ein begeisterter Maker aus der Schweiz seine Idee eines verbesserten Fahrwerkes skizziert. Bei meinem Design sind die vier Räder steif mit der Antriebsachse des Motors verbunden. Diese Umsetzung hat in vielerlei Hinsicht seine Probleme. So werden alle Schläge auf die Räder auch direkt über die Antriebsache dieses Rades an das Getriebe des Motors übertragen. Schon bei kleinen Unebenheiten passiert es, dass ein oder zwei Räder in der Luft sind und die Geländegängigkeit entsprechend nicht mehr gegeben ist.
Das folgende Bild zeigt bei meinem bisherigen Aufbau die starre Verbindung zwischen Motor, Antriebsachse und Rad sehr gut.

Custom-Build-Robots-Big-Rob.8
Mit Herrn Bossert hatte ich ein paar Mails ausgetauscht und Ihn auf das Problem mit dem Fahrwerk des Big Rob Roboters angesprochen. Er erklärte sich gleich bereit über eine Lösung nachzudenken und erstelle eine ganz tolle Prinzip Skizze für ein verbessertes Fahrwerk. Jedes Rad hat bei seiner Lösung einen von den anderen Rädern unabhängigen Federweg.
Auch macht die Lösung einen robusten Eindruck und mit einem Federweg von ca. 4cm sollte die Geländegängigkeit deutlich besser sein als mit den starren Achsen.
Fahrwerk Design
Das folgende Bild zeigt die Prinzip Skizze von Herrn Bossert in der Draufsicht. Sehr gut zu erkennen ist, dass die Motoren liegend eingebaut sind und nicht stehend wie bei meiner Umsetzung. Auch wurde die Motorachse und die Achse hin zum Rad über ein Kreuzgelenk voneinander entkoppelt.
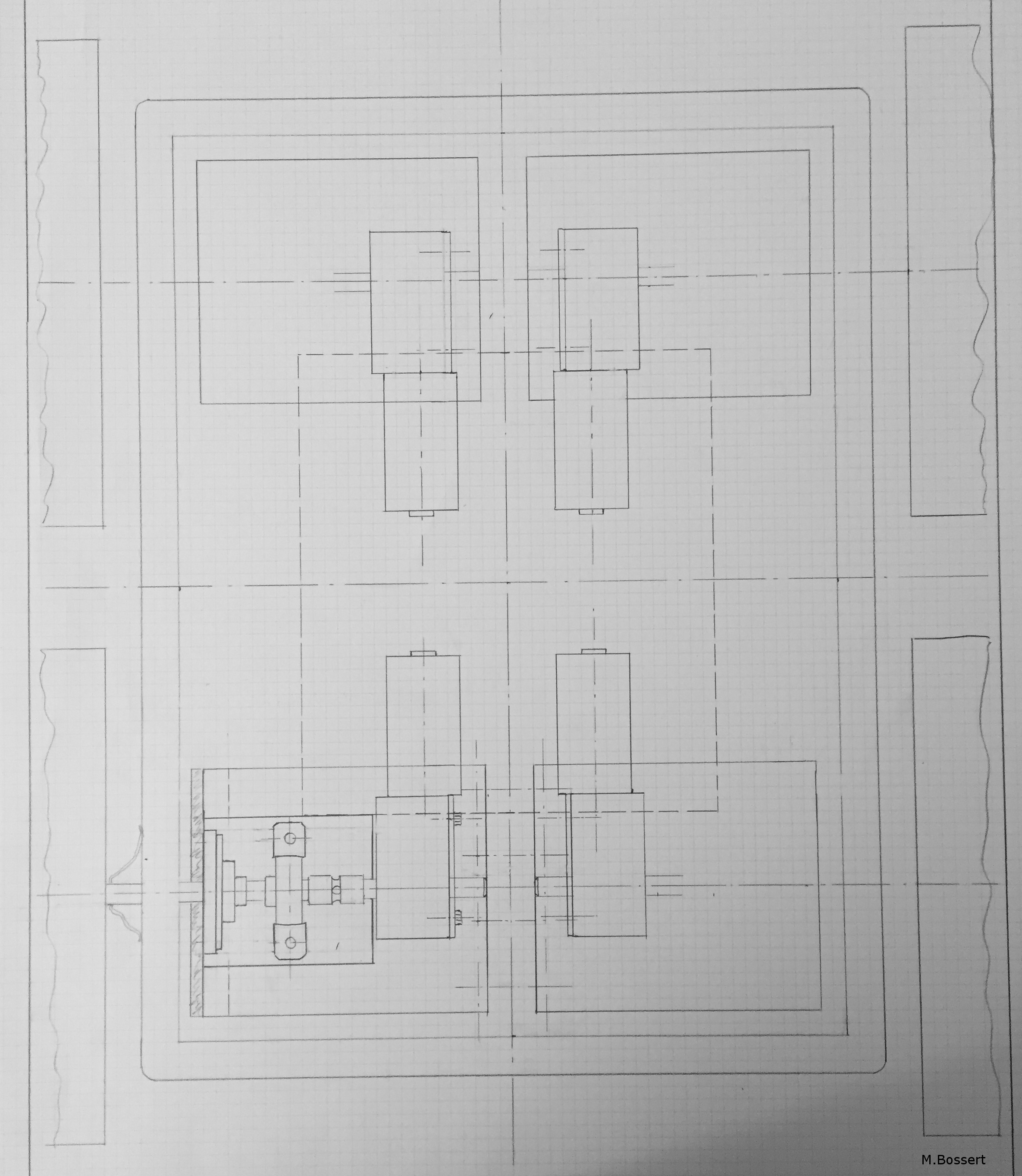
Big Rob Fahrwerk Grundriss (von Herrn Bossert)
Im Aufriss von Herrn Bosserts Prinzip Skizze sind die Details wie der Federweg umgesetzt wurde sehr ausführlich und detailreich beschrieben.
Aktuell geht Herr Bossert davon aus, dass mit den Stoßdämpfern die er plant zu verbauen ein Gesamtgewicht von ca. 20 kg möglich sein sollte. Für einen Roboter mit einem 3,8 kg Akku wie dem 30Ah PeakPowerPack von Victron ist dieses Gesamtgewicht mehr als ausreichend. Eine Erhöhung des Gesamtgewichtes ist nicht ohne weiteres möglich und würde eine Anpassung des Designs notwendig machen.
Sehr gut zu erkennen ist im linken unteren Teil der Zeichnung wie sich der gesamte Motor zusammen mit dem Rad bewegen kann. Ich finde diese Umsetzung technisch sehr gut gelungen, da der Aufbau einen sehr robusten Eindruck mach und sich sehr gut umsetzen lässt. Auch sind die notwendigen Komponenten von der Stange verfügbar. Auch passende Stoßdämpfer von denen pro Achse einer benötigt wird sollten in jedem Modellsportladen vorrätig sein.
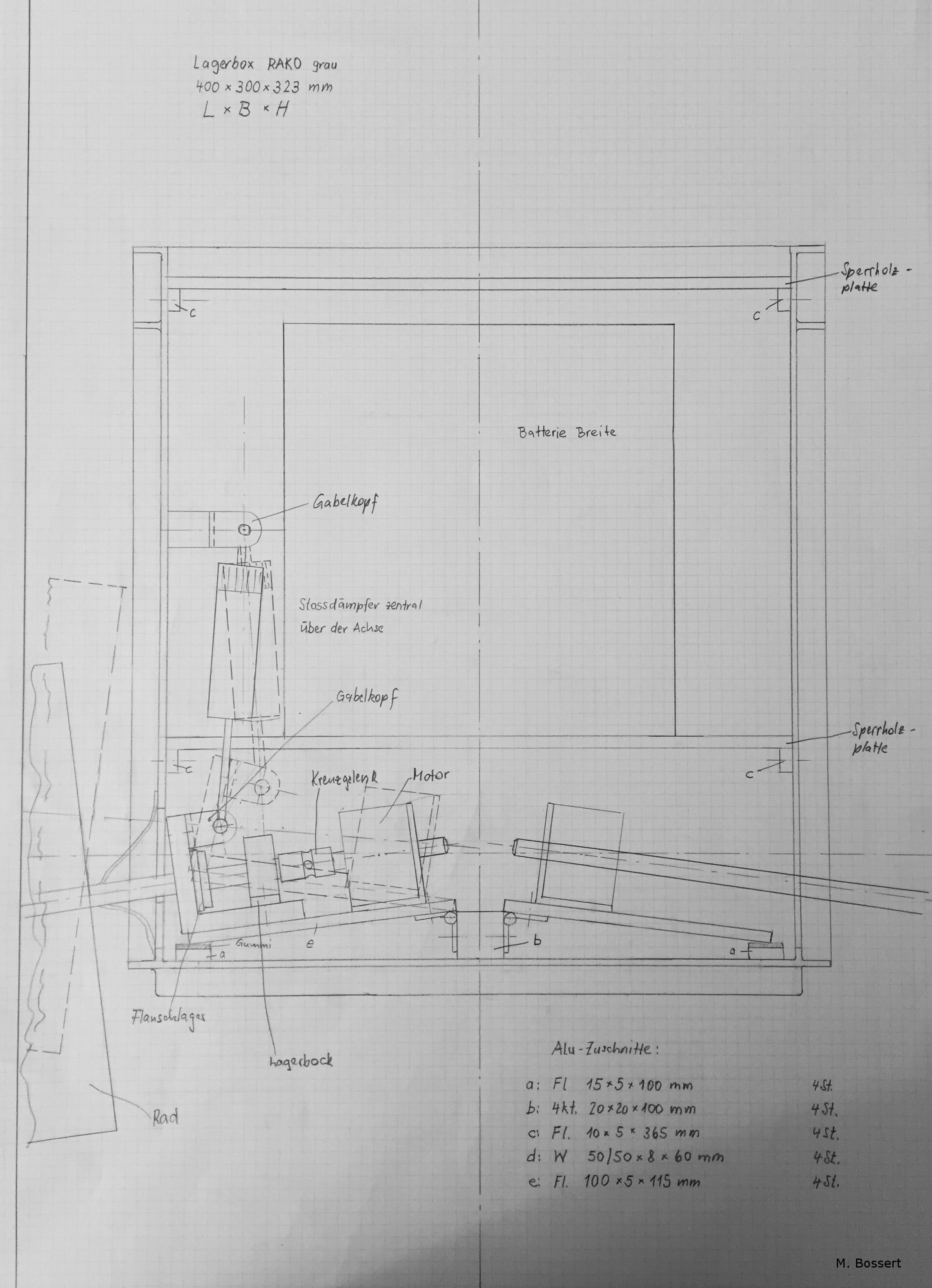
Big Rob Fahrwerk Aufriss (von Herrn Bossert)
Herr Bossert setzt seine Idee des Fahrwerkes aktuell an seinem Big Rob Roboter um.
Zusammenfassung
Mit der Idee einer Federung für das Fahrgestell des Big Rob Roboters hat dieser auch in unebenen Gelände einen deutlich besseren Vortrieb. Die Räder sollten nicht so schnell in der Luft sein und mit einem erwarteten Federweg von ca. 4 cm pro Rad ist wirklich viel gewonnen. Ich werde die Idee des Fahrwerkes von Herrn Bossert aufgreifen und bei Gelegenheit meinen Roboter umrüsten.
Artikelübersicht - Big Rob:
RASPBERRY PI ROBOTER – BIG ROB BAUANLEITUNGRASPBERRY PI ROBOTER – PEAK POWER PACK STROMVERSORGUNG
RASPBERRY PI ROBOTER – BIG ROB 4×4 ELEKTROMOTOR ANTRIEB
RASPBERRY PI ROBOTER – BIG ROB MOTORTREIBER BTS7960B UND SOFTWARE
RASPBERRY PI ROBOTER – BIG ROB OUTDOOR-KAMERAGEHÄUSE
RASPBERRY PI ROBOTER – BIG ROB mit differential GPS
RASPBERRY PI ROBOTER – BIG ROB ZÄHNE
RASPBERRY PI ROBOTER – BIG ROB FAHRWERK OPTIMIERUNG
RASPBERRY PI ROBOTER – BIG ROB modularer Aufbau 1-2
RASPBERRY PI ROBOTER – BIG ROB modularer Aufbau 2-2












Hi,
Was für reifen verwendest du? und woher hast du die?