

Bei der Umsetzung des modularen Aufbaus des Big Rob Roboters behalte ich die vorhandene Elektronik bei und werde hier weitestgehend nichts verändern. Der bisherige Aufbau wurde in zwei Module aufgeteilt. Es kommen weiter der Raspberry Pi 2 Model B zum Einsatz, das differential GPS System und der vorhandene Antrieb mit 12v / 30 Ah Akku. Beim Umbau wird die Elektronik für die Steuerung der Motoren in ein eigenes Modul umgezogen das Steuerungsmodul. Die Motoren und der große Akku bleiben in der unteren Kiste dem sogenannten Antriebsmodul. Der Akku sorgt so für einen niedrigen Schwerpunkt. Verbunden werden die beiden Module über ein 7-poliges KFZ Anhängerkabel mit entsprechendem Stecker und Buchse. So kann ich die Motoren steuern und die Stromversorgung aufbauen.
Das folgende Bild zeigt den ersten Aufbau mit dem Steuerungs- und Antriebsmodul. Zwischen diesen beiden Modulen können zwei weitere eingesetzt werden wenn der Bedarf besteht.

Big Rob – Modulsystem fertig aufgebaut
Steuerungs-Modul
Das Steuerungsmodul ist auf zwei Holzplatten aufgebaut die durch vier 4mm Gewindestangen auseinander gehalten werden. Auf der unteren Platte des Moduls sind die Stromleitenden Bauelemente und Versorgungskabel untergebracht. Dazu gehören einmal das 7-polige Kabel mit Stecker sowie die beiden Motortreiber.
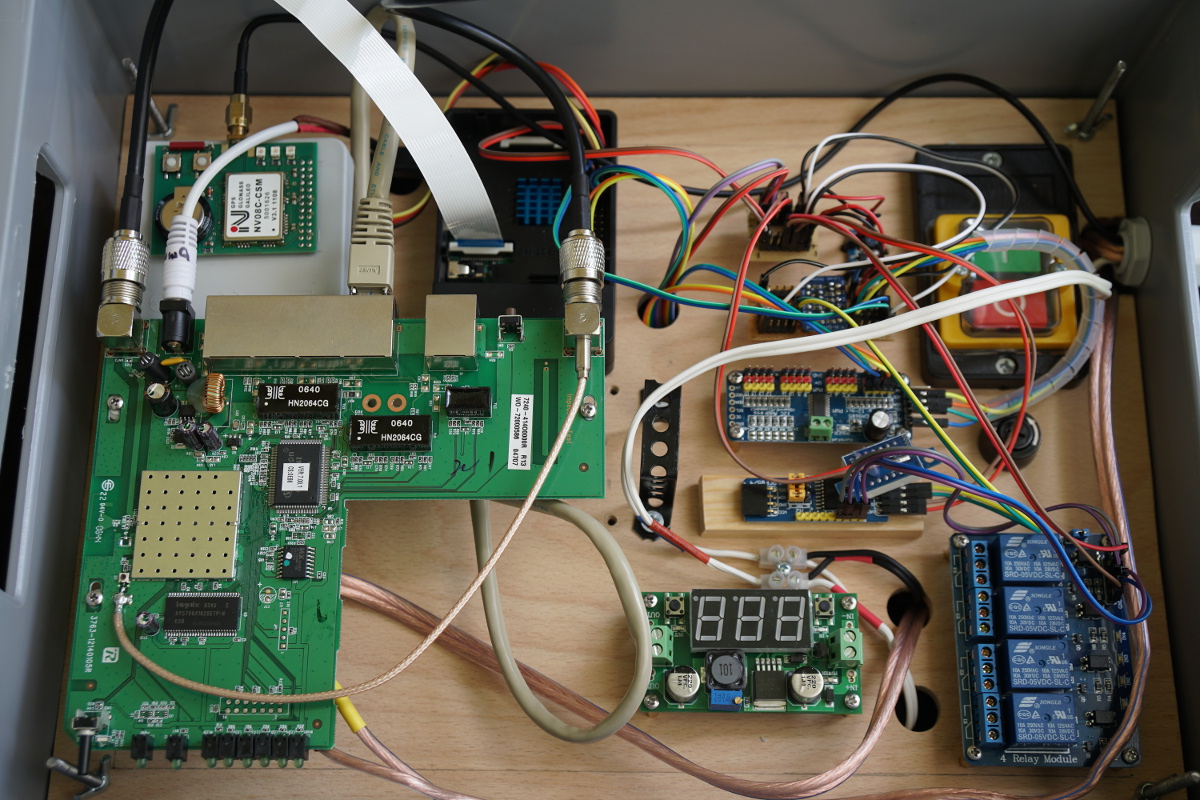
Auf der oberen Platte ist der Raspberry Pi, der Servo Kontroller, der Linksys Router sowie das GPS Modul und weitere Bauelemente wie z. B. ein Relais befestigt. Der Vorteil der Holzplatten ist einmal ein deutlicher Zugewinn an Platz und ein sauberer Aufbau. Das Holz lässt sich gut bearbeiten und die Bauelemente mit Schrauben oder Klebstoff daran befestigen.
Auch sind die Kabel mit Klemmen oder genügend Spiel so befestigt, dass sich die Halterung also die beiden Platten an einem Stück aus dem Gehäuse heraus nehmen lassen. Das ist ideal bei Anpassungen des Aufbaus oder wenn neue Bauelemente dem Roboter hinzugefügt werden.

Big Rob – Modulsystem Elektronik
WIFI & Co.
Angedacht ist noch über zwei WIFI-Bridges die der Roboter ablegen kann, dass Operationsgebiet des Roboters deutlich zu erweitern. Aktuell arbeite ich noch an den WIFI Bridges und werde mehr dazu schreiben wenn die Idee funktioniert.
Big Rob – Modulsystem obere Platte mit Elektronik
Angedacht ist noch über zwei WIFI-Bridges die der Roboter ablegen kann, dass Operationsgebiet des Roboters deutlich zu erweitern. Aktuell arbeite ich noch an den WIFI Bridges und werde mehr dazu schreiben wenn die Idee funktioniert.
[DE_BOOK_DETAIL DE_BOOK_DETAIL=““]
Antriebs-Modul
Das Antriebsmodul ist weitestgehend unverändert der schon vorhandene Aufbau. Angepasst wurde lediglich die Halterung für den Akku sowie die Anhänger Buchse für die Stromversorgung des Steuerungsmoduls und der Motoren. Das folgende Bild zeigt wie das Antriebsmodul nach dem Umbau aussieht.

Big Rob – Modulsystem Antrieb mit Akku
Zusammenfassung
Der Umbau hat etwas länger gedauert als ich erwartet hatte. Dafür ist dieser für den ersten Wurf ganz gut gelungen aber ich sehe schon den Bedarf die Holzplatten neu zu kaufen und den Aufbau noch einmal etwas optimiert vorzunehmen. So wäre es sinnvoll die Holzplatten nicht exakt passgenau in die graue Kunststoffkiste einzusetzen. Bessere wäre z. B. ein Spiel von 2 cm rings herum umso noch Ultraschall Sensoren oder Kameras in das Gehäuse einlassen zu können.
Aber jetzt werde ich den Roboter erst einmal einem Test unterziehen bevor ich mich an weiter Optimierungen machen werde.
Artikelübersicht - Big Rob:
RASPBERRY PI ROBOTER – BIG ROB BAUANLEITUNGRASPBERRY PI ROBOTER – PEAK POWER PACK STROMVERSORGUNG
RASPBERRY PI ROBOTER – BIG ROB 4×4 ELEKTROMOTOR ANTRIEB
RASPBERRY PI ROBOTER – BIG ROB MOTORTREIBER BTS7960B UND SOFTWARE
RASPBERRY PI ROBOTER – BIG ROB OUTDOOR-KAMERAGEHÄUSE
RASPBERRY PI ROBOTER – BIG ROB mit differential GPS
RASPBERRY PI ROBOTER – BIG ROB ZÄHNE
RASPBERRY PI ROBOTER – BIG ROB FAHRWERK OPTIMIERUNG
RASPBERRY PI ROBOTER – BIG ROB modularer Aufbau 1-2
RASPBERRY PI ROBOTER – BIG ROB modularer Aufbau 2-2












Recent Comments