

Für einen Roboter Auto Wettbewerbe, den ich organisiert habe, hatte ich den Bedarf die Rundenzeiten der einzelnen Teams im Wettbewerb zu messen. So habe ich mir, wie in den beiden vorherigen Berichten beschrieben, erst einmal die Grundlagen in einen Prototyp mit drei Laserlichtschranken erarbeitet. Die fertige mobile Version hatte dann nur noch einen Laser mit einer Photozelle. Dafür erweitere ich aber die Basisstation der Lichtschranke um ein OLED Display für die direkte Anzeige der gemessenen Rundenzeiten in Millisekunden. Um die Zeitmessung für das am Start befindliche Team zu starten setzte ich auf einen RFID Reader mit entsprechenden Tags pro Team.
Die fertige Lichtschranke für die Rundenzeitmessung ist auf dem nachfolgenden Bild zu sehen.
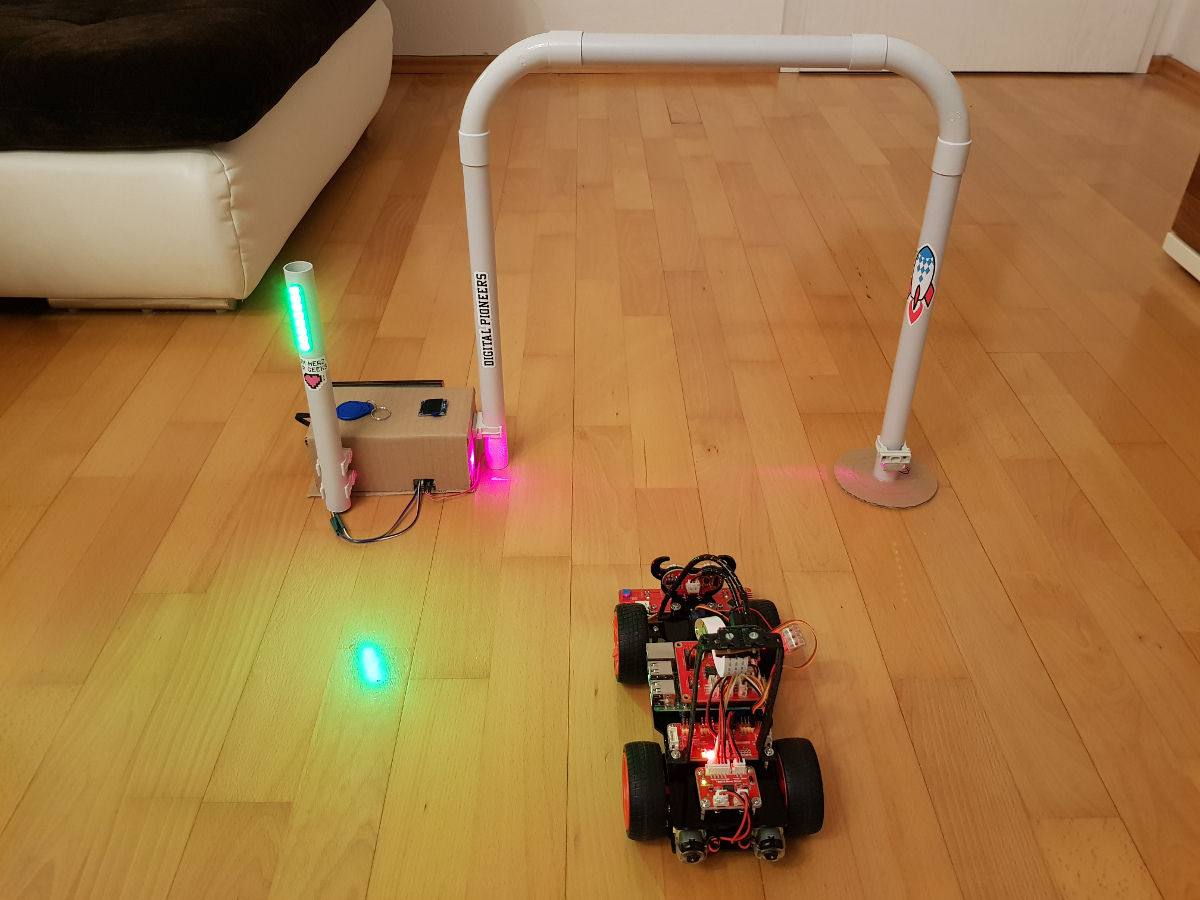
Roboter Auto Rundenzeit messen – mobile Lichtschranke
Hardwareliste Laser-Lichtschranke:
Für die mobile Raspberry Pi Laser-Lichtschranke habe ich verschiedene elektronische Komponenten benötigt. Alle diese Komponenten wurden in der hier vorgestellten mobilen Variante tatsächlich verbaut. Diese Hardwareliste hier im Post weicht leicht von den Komponenten ab die ich in den ersten Prototypen mit drei Lasern verbaut hatte.
Raspberry Pi ZERO W
Der Raspberry Pi ZERO W ist ideal für dieses Projekt. Er kann mehrere Stunden dank seines niedrigen Stromverbrauches mit einer Power-Bank betrieben werden.

Micro-SD Karte 16 GB
Eine micro-SD Karte mit 8 GB reicht für dieses Projekt völlig aus. Diese gibt es aber so gut wie nicht mehr und die 16 GB Karte hier hat einen ganz guten Preis

PowerBank
Für die mobile Nutzung auf der Roboter Auto Rennstrecke ist eine Energieversorgung ohne Kabel sondern mit einer Power Bank ideal. Daher empfehle ich den kauf ener 13.000 mAh Power Bank. Diese versorgt den Raspberry Pi Zero W für mehr als sechs Stunden ausreichend mit Energie.
")
Laserdiode 5 mW (650 nm rot)
Diese 10 Laderdioden sind ideal für dieses Projekt.
LM393 Photowiderstand – Platine mit Photowiderstand und Anschlüssen (3,3 V)
Der Photowiderstand hat einen digitalen Ausgang der mit 3,3 V arbeitet und über das Potentiometer in seinen Schalteigenschaften / Helligkeit eingestellt werden.

Blink!
Blink! ist eine kleine LED Leiste die auf den GPIO Header eines Raspberry Pi aufgesteckt werden kann. Ich möchte diese als Ampel verwenden.

OLED Display
Mit dem OLED Display können die Rundenzeiten, das Team und Statusinformationen angezeigt werden. Das hatte sich bewährt und verbesserte die Handhabung der Lichtschranke deutlich.

RFID Reader
Den RFID Reader habe ich verbaut um die einzelnen Teams anahnd dem zugeordneten RFID Token identifizieren zu können und um die Zeitmessung zu starten wenn das RFID Token auf den Reader aufgelegt wird.

Kabel 4 Adern isoliert
Vieradern reichen aus für Signal und Stromversrogung 3,3 V und 5,0 V.

PVC Rohre
Die PVC Rohre die ich verwendet habe gibt es in jedem Baumarkt in der Elektronikabteilung zu kaufen.
Raspberry Pi mobile Laser-Lichtschranke – Basis
Die Basis habe ich gebaut um in dieser alle Komponenten unterzubringen. Ich habe das Gehäuse der Basis selber aus Karton gebaut da dieser einfach zu bearbeiten ist. Für die Power Bank habe ich eine Halterung links neben der Basis gebaut um diese schnell wechseln zu können. Hätte ich diese mit in die Basis integriert hätte ich diese immer öffnen müssen um die Power Bank zu laden.
Das OLED Display ist fest oben im Deckel eingebaut. Auch habe ich den RFID Leser direkt unter dem Deckel (Smily Aufkleber) mit einem extra Halter befestigt. Die LED Anzeige für den Ampel-Status ist eine acht-Segment Blinkt! LED Leiste die für den Raspberry Pi entwickelt wurde. Die Blinkt! LED Leiste selber ist in ein PVC Rohr eingelassen welches an der Basis befestigt ist. So kann ich die LED Anzeige in alle Richtungen je nach Aufbau der Ampel an der Rennstrecke drehen.

Roboter Auto Rundenzeit messen – Gehaeuse
Das nachfolgende Bild zeigt die Elektronik in der Basis. Viel Platz war nicht mehr für die Komponenten und Kabel. Gut zu sehen ist links der die blaue Platte des RFID Readers. Unter dem RFID Reader sitzt der Raspberry Pi ZERO W. Zu diesem laufen auch alle Kabel hin bzw. von diesem weg. Rechts ganz klein ist die kleine Platine des LM393 Photowiderstand zu sehen.
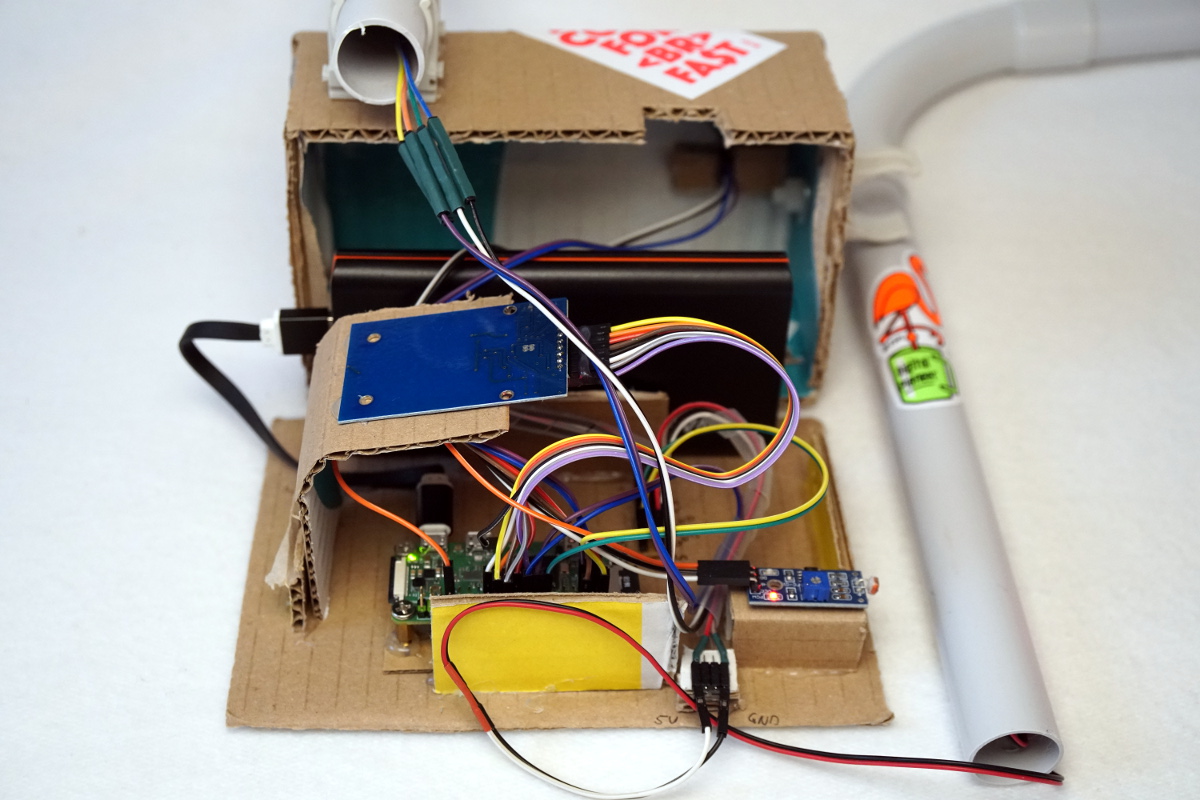
Roboter Auto Rundenzeit messen – Elektronik
DerLM393 Photowiderstand wurde an Vcc 3,3V des Raspberry Pi angeschlossen. Auf die Photozelle des Photowiderstandes muss der Laser exakt ausgerichtet werden. Über das Potentiometer wird die Empfindlichkeit des Widerstandes eingestellt.
Hinweis:
Da die Lichtverhältnisse während mehrere Wettbewerbstage stark schwanken können sollte das Potentiometer von außen gut zugänglich sein. Das war bei meiner Basis nicht der Fall und so musste ich für die Justierung des Photowiderstandes das Gehäuse immer wieder öffnen.
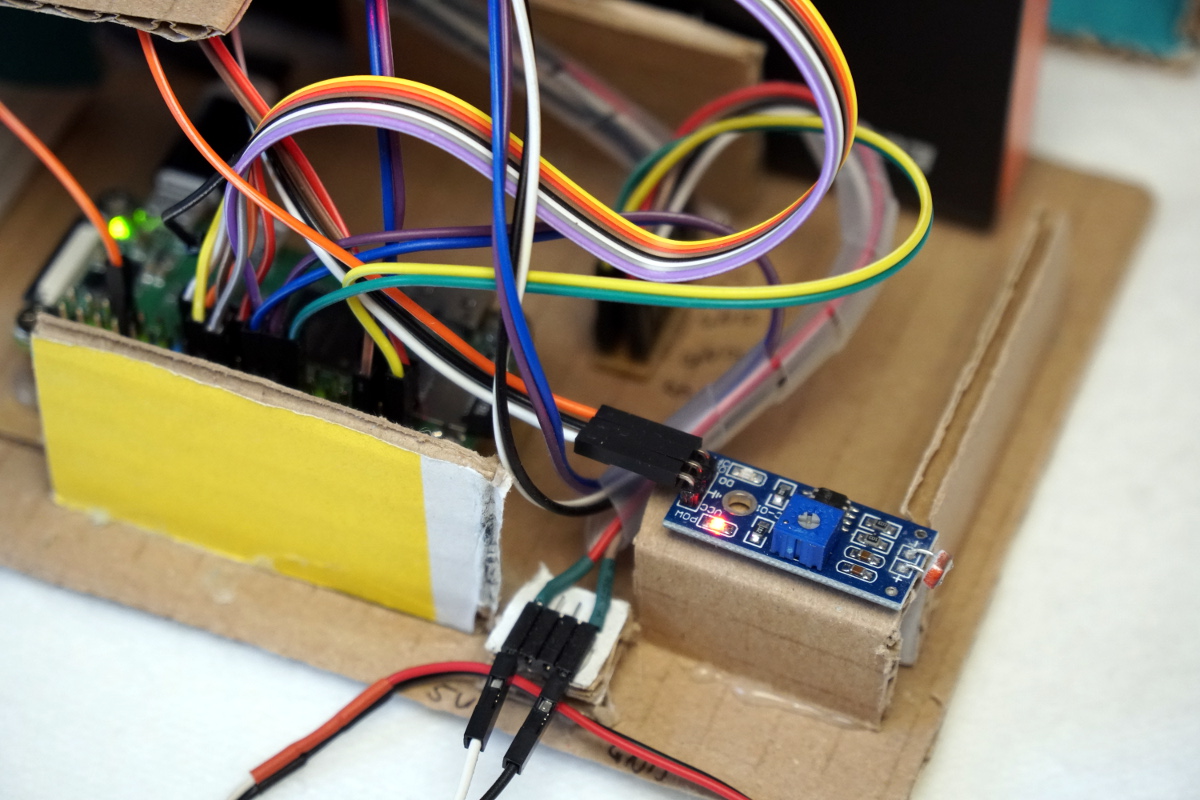
Roboter Auto Rundenzeit messen – LM393 Photowiderstand
In dem PVC Rohrbogen den ich gebaut hatte verlegte ich ein Y-Kabel für die 5V Stromversorgung der Laserdiode. Diese Laserdiode habe ich auf ein kurzes Stück Aluprofil geklebt. Der Laser selber wird nach ein paar Stunden Betrieb etwas warm und so konnte die Wärme etwas besser abgeleitet werden.

Roboter Auto Rundenzeit messen – Laser-Lichtschranke
Im nachfolgenden Bild ist der rote Punkt des Lasers gut zu sehen. Er strahlt direkt auf den Photowiderstand.
Hinweis:
Der PVC Bogen war eigentlich ganz gut da er leicht aufzubauen war. Aber es kam natürlich häufig vor, dass die Roboter Autos gegen die Basis oder eines der Beine des PVC Bogens gefahren sind und der Laser dann immer wieder neu ausgerichtet werden musste. Daher wäre hier wohl eine andere Konstruktion die nicht so leicht zu verschieben geht oder nicht so nahe an der Rennstrecke aufgebaut wird etwas besser.
Auch ist die OLED Anzeige etwas zu sehen. Auf dieser wurden die Zeiten der jeweiligen Runde angezeigt.
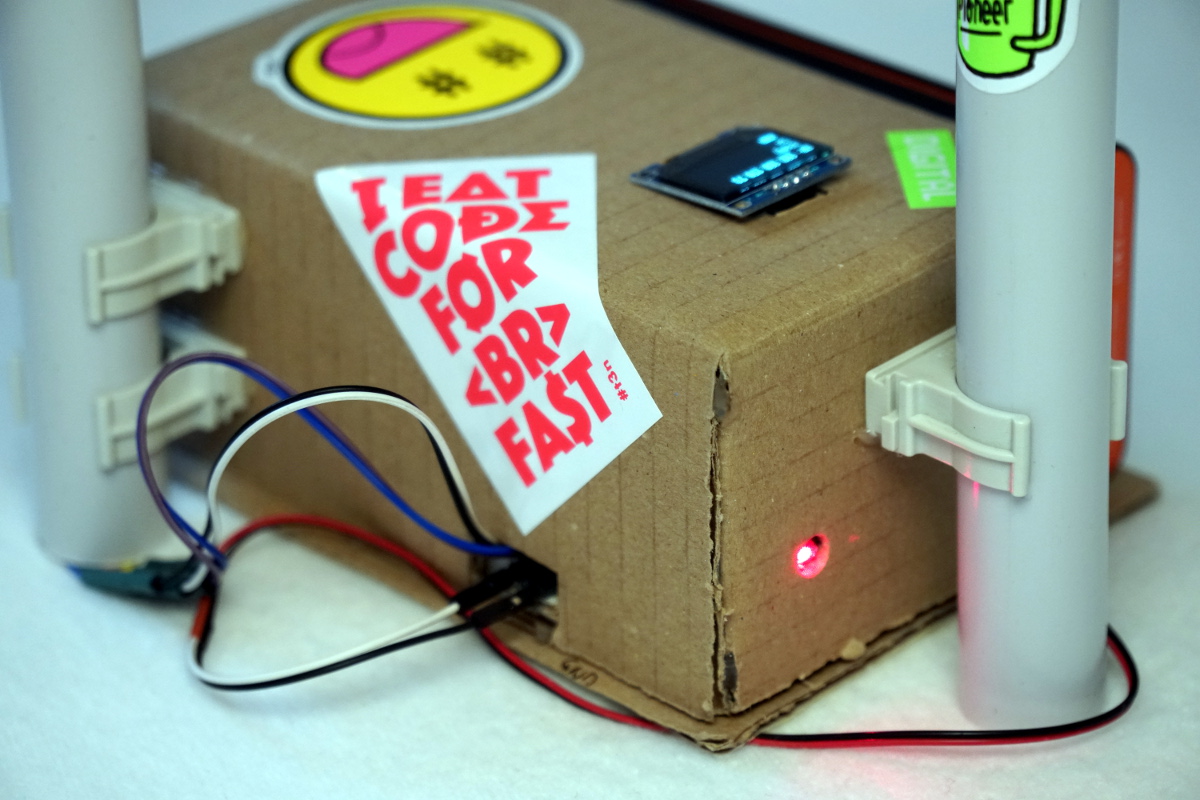
Roboter Auto Rundenzeit messen – Photozelle und OLED Display
Software Raspberry Pi Laser-Lichtschranke
Die Software ist auf meinem GitHub Account veröffentlich. Diese besteht aus zwei Programmen. Eines misst nur 1x eine Runde und wartet anschließend wieder auf ein neues Team bzw. RFID Token. Das andere Programm geht davon aus, dass fünf Runden gefahren werden für den Line-Follower Kurs. Die Rundenzeiten werden einmal in dem OLED Display angezeigt und als CSV Datei auf die micro SD-Karte geschrieben.
GitHub Account: https://github.com/custom-build-robots/light-barrier
Zusammenfassung
Der Bau der Laser-Lichtschranke mit einem Raspberry Pi war sehr interessant und ich konnte viele neue Aspekte der Zeitmessung kennen lernen. Die Komplexität hätte ich mir so zu Beginn nicht vorgestellt. So passiert es typischer Weise das ein Roboter Auto welches durch die Lichtschranke fährt diese mehrfach auslöst. Solche Messfehler müssen natürlich abgefangen werden. Setzt man aber die Bouncetime der Zeitmessung zu hoch so bekommt man andere Probleme wenn z. B. das Roboter Auto an der Basis hängen bleibt. Vielleicht wäre ein Aufbau mit zwei Lichtschranken doch besser gewesen.












Recent Comments