


In diesem Beitrag stelle ich die Theorie vor wie der Aufbau für eine präzise GNSS Positionierung aussehen kann. Ein wesentlicher Bestandteil des Aufbaus ist die stationäre GPS Station die im weiteren Verlauf genannte Basisstation. Diese kennt ihre genauen Ort auf weniger Meter oder idealerweise Zentimeter genau an der sie aufgestellt ist. Der Roboter bzw. die mobile Einheit ist ebenfalls mit GPS ausgestattet und kennt ihre Position nur ungenau auf ein paar Meter. Damit auch die mobile Einheit ihre Position so genau wie möglich kennt muss der Fehler der Abweichung ermittelt werden. Dazu wird die mobile Einheit mit der Basis Station verbunden. Diese Funkverbindung muss sehr schnell sein da es sonst wieder zu Abweichungen in der ermittelten Position des Roboter-Autos kommen kann bedingt durch die Laufzeit des Signals. Der Aufbau sieht dann wie auf dem folgenden Bild gezeigt aus.

Raspignss theoretical setup
Woher kommen die Abweichungen in der GPS Position?
Die Abweichungen der genauen GPS Position sind einmal gewollt und kommen auch durch Störungen zustande. Die verschiedenen aktuell aktiven GPS Systeme wurden für die Militärs entwickelt und die Betreiber dieser Systeme wollen nicht, dass andere Nutzer außer Sie selber die maximale Genauigkeit ihres Systems nutzen können. Weiter kommt es zusätzlich zu Abweichungen bedingt durch die lange Wegstrecke von Satellit zum Empfänger. Für diese Abweichungen verantwortlich können z. B. unterschiedliche Luftmassen sein durch die sich das Signal unterschiedlich schnell ausbreitet in der Ionosphäre und Stratosphäre. Auch Reflektionen entlang von Bergen in Tälern oder z. B. an hohen Häusern können für ein ungenaues Signal und somit abweichender Positionierung von der tatsächlichen Position sorgen. Alle diese Fehlerquellen sorgen dafür, dass das GPS Signal als solches nur eine ungenaue Ermittlung der tatsächlichen Position zulässt.
Wie erfolgt die Korrektur der GPS Position?
Die Korrektur erfolgt durch den Einsatz der RTK Bibliothek. Innerhalb dieser Bibliothek wird über komplexe Berechnungen die genaue Position der mobilen Einheit mit dem Programm RTKRCV ermittelt. Dieser Vorgang beansprucht einige Zeit und kann soweit ich das bis jetzt abschätzen kann zwischen ein paar Minuten und ein paar Stunden dauern. Das hängt von der Anzahl der empfangen Satelliten sowie von der Qualität der übertragenen Signalen ab. Empfängt die Basisstation und mobile Einheit genügend Satelliten ist das System sehr schnell einsatzbereit und kann den Roboter mit Korrekturdaten versorgen. Durch die Funkverbindung die zwischen Roboter-Auto und Basisstation besteht kann die ungenaue Position des Roboters korrigiert werden. So ist es diesem möglich sehr genau im Zentimeterbereich zu navigieren. Wichtig ist, das die Funkverbindung schnell ist. Hier ist schnell im Sinne der Zeit gemeint die es bedarf die Korrekturdaten zwischen Basisstation und Roboter-Auto auszutauschen. Mehr über die RTK Bibliothek und was genau dahinter steckt steht auf der zugehörigen Projekt Webseite näher beschrieben.
Webseite: An Open Source Program Package for GNSS Positioning RTKLIB
Technischer Aufbau mit dem RaPiGNSS Modul
Der technische Aufbau des Systems ist eigentlich recht schnell beschrieben. In der Basisstation und im Roboter-Auto kommt jeweils ein RasPiGNSS “Aldebaran” Modul von www.drfasching.at zum Einsatz. Auf seiner Webseite können die Module und Antennen auch bezogen werden die Sie für diesen Aufbau benötigen. Dieses RasPiGNSS Modul wird auf einen Raspberry Pi auf die Stiftleiste gesteckt. Für die Funkverbindung zwischen Roboter und Basisstation wird jeweils ein XBee Pro Modul eingesetzt. Die XBee Pro Module werden über einen USB Adapter jeweils mit dem Raspberry Pi verbunden. Dieses arbeitet im 2 GHZ Bereich und ermöglich eine Reichweite von mehreren hundert Metern. Ich habe mich für XBee Pro S1 Module entschieden an die ich eine externe Antenne anschließen kann. Als Betriebssystem verwende ich Raspbian Jessie. Damit sind die wesentlichen Komponenten für den Aufbau des Systems eigentlich auch schon beschrieben.
Das folgende Bild zeigt die RasPiGNSS “Aldebaran” Module montiert auf einem Raspberry Pi.
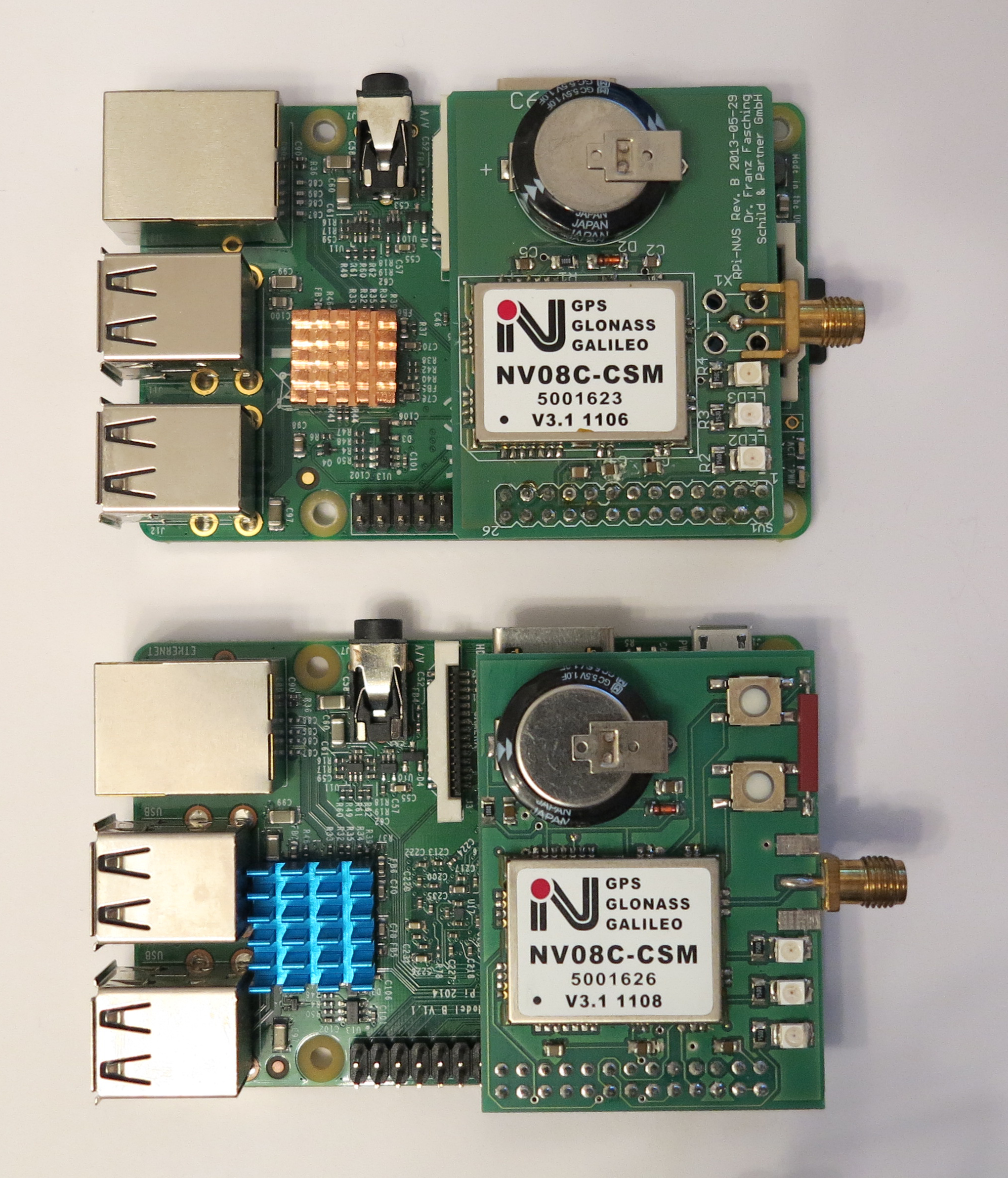
RasPiGNSS mounted
Artikel Übersicht GPS Modul RasPiGNSS:
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – EinführungPräzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB - Theoretischer Aufbau
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – GPS Antennen Aufbau
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – Software Installation
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – Konfiguration RTK Basisstation
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – Konfiguration RTK Mobile Einheit
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – XBee Funkverbindung Vorraussetzungen
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – XBee serielle Datenübertragung
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – Navigation
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – RasPiGNSS im Dauer-Betrieb
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – Erfahrungsbericht












Recent Comments