

Die Basisstation und das Roboter-Auto müssen über Funk miteinander verbunden werden. Nur so kann mit der RTK-Bibliothek eine exakte GPS-Positionierung umgesetzt werden. Diese Funkverbindung ist notwendig damit die ungenaue GPS Position des Roboter-Autos in das Verhältnis gesetzt werden kann mit der genauen GPS Position der Basisstation. Nur so ist es möglich den Fehler in der Position des Roboter-Autos zu erkennen und zu beheben. Für die Funkverbindung der Basisstation mit dem Roboter-Auto verwende ich zwei XBee Pro S1 Funkmodule. Die nach dem Zigbee-Standard funkenden Module laden geradezu dazu ein für meinen Aufbau verwendet zu werden. Einige große Hersteller aus der Industrie unterstützen diesen Funkstandard. Wer mehr lesen möchte erfährt dazu weitere Informationen auf Wikipedia unter dem folgenden Link (Wikipedia XBee). Diese XBee Module lassen sich sehr einfach mit einem USB Adapter an den Raspberry Pi anschließen und betreiben.
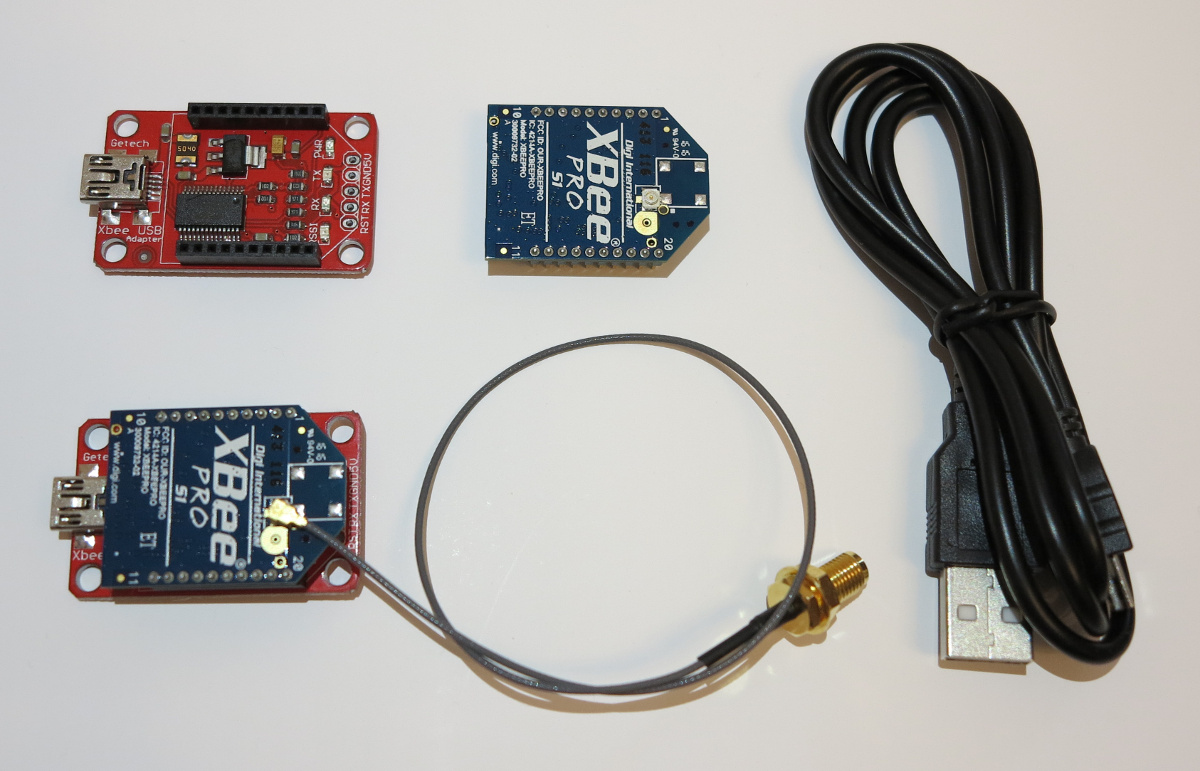
Die Module die ich gewählt habe verfügen über einen Antennenanschluss für eine externe Funkantennen (UF.L HF-Verbinder). So erhoffe ich mir die Reichweite zu erhören und den Aufbau in meinem Roboter-Auto flexibler gestlaten zu können. Auf dem folgenden Bild sind die beiden Module zu sehen. Bei dem rechten habe ich die externe Antenne schon angeschlossen.

XBee Pro Funkmodul
Etwas Mut habe ich gebraucht die externe Antenne an der UF.L Buchse anzuschließen. Denn hier ist etwas Kraft notwendig den Stecker auf die Buche zu drücken. Aber dann sitzt dieser sehr fest und macht einen guten Eindruck insofern das es zu keinen Verbindungsproblemen kommen sollte.
Technische Daten XBee PRO:
- Betriebsspannung: 2,8- 3,4V (ideal für den Raspberry Pi)
- Frequenz: 2,4 GHz ( ISM Band )
- Sendeleistung: 0 dBm ( 1 mW )
- Empfindlichkeit: -92 dBm
- Reichweite: bis zu 30 m Indoor / 1600 m Outdoor (stark abhängig vom verwendeten Modul. Die PRO Module haben deutlich mehr Sendeleistung.)
- Stromaufname: ( TX / RX / Power-Down Current ) 45 mA / 50 mA / <10uA
- Datenrate ( über Funk ): 250.000 bps
- Datenrate ( Interface ): 1.200 bps – 250 kbps
- serielle Schnittstelle: 3.3V CMOS UART
- Standard: IEEE 802.15.4
- Topologien: Point-to-point, Point-to-multipoint und Peer-to-peer Konfiguration des Aufbaus möglich.
Hier ein Angebot bei Amazon für ein XBee Modul wie ich dieses an meinem Raspberry Pi in Verwendung habe. Von der Bauform unterscheiden sich die Module immer etwas leicht aber von der Funktion gibt es keinen Unterschied.

Mit einem XBee Explorer können die XBee Module einfach über USB an den Raspberry Pi angeschlossen werden.

Als Antennen habe ich die folgenden bei mir verbaut. Diese funktionieren ohne Probleme und konnen über die nachfolgende Werbung bei Amazon gekauft werden.

XBee USB Adapter – XBee Explorer
XBee Pro S1 Modul – USB Adapter
Zusammenfassung:
Die Funkverbindung über eine serielle Schnittstelle zwischen den beiden Raspberry Pis kann mit zwei XBee Pro Modulen sehr einfach aufgebaut werden. Über diese Funkverbindung werden die GPS Rohdaten der Basisstation an die mobile Einheit für die exakte GPS-Positionierung übertragen. Die Kommunikation der Funkmodule klappte ohne großer Konfiguration wenn ich das an dieser Stelle vorweg nehmen darf. Wie zwei Raspberry Pi’s mit jeweils einem XBee Modul verbunden werden beschreibe ich in einem weiteren Bericht. Aktuell habe ich die Hardware noch in meinem Büro liegen und nocht nicht ausprobiert.
Artikel Übersicht GPS Modul RasPiGNSS:
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – EinführungPräzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB - Theoretischer Aufbau
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – GPS Antennen Aufbau
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – Software Installation
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – Konfiguration RTK Basisstation
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – Konfiguration RTK Mobile Einheit
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – XBee Funkverbindung Vorraussetzungen
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – XBee serielle Datenübertragung
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – Navigation
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – RasPiGNSS im Dauer-Betrieb
Präzise GNSS-Positionierung mit dem Raspberry Pi und RTKLIB – Erfahrungsbericht












Recent Comments