


Willst Du auch Dein Roboter-Auto in der Hall of Fame zeigen?
Dann kannst Du ein Bild und eine kurze Beschreibung an hall-of-fame@custom-build-robots.com schicken. Dann veröffentlichen wir auch Dein Roboter-Auto in der Hall of Fame.
In der Hall of Fame werden die tollen Modelle gezeigt, die Leser z. B. anhand von meinem Buch „Roboter-Autos mit dem Raspberry Pi: Planen, bauen, programmieren“ gebaut haben. Aber ich zeige natürlich auch gerne Raspberry Pi Roboter-Autos die vielleicht aus Projekten meiner Leser hier auf meiner Webseite entstanden sind. Es muss auch nicht immer ein Raspberry Pi Computer für die Steuerung des Roboters eingesetzt werden. Es gibt viele andere kleine Computer und Micro-Controller die sich auch sehr gut für die Steuerung eines Modell-Roboters eignen.
Nachfolgend kommen die Bilder der Roboter-Autos die mir zugeschickt wurden bzw. die ich selber gebaut habe.
TechnoBot
- Maker: S. Geisler
- Date: August 2017
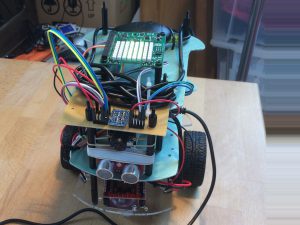
- Beschreibung: Als Basis diente das Lego Technic Model 42065, welches für den Roboter jedoch komplett modifiziert wurde. Daher auch die Namensgebung „TechnoBot“. Als Antrieb dienen die zwei, dem Bausatz beiliegende Lego-Technic Elektromotoren, welche nach Abtrennung der Legostecker mit dem Motorchip angetrieben werden können. Die Steuerprogramme und das Web-Interface wurden nach Vorlage der Programme aus dem Buch „Roboter-Autos mit dem Raspberry Pi: Planen, bauen, programmieren“ geschrieben und anschließend erweitert bzw modifiziert. Als kleines „Gadget“ kann man nun auf der LED-Matrix „Snake“ spielen.
Das folgende Bild zeigt den Techno Bot auf Basis eines Raspberry Pi von vorn.

TechnoBot front view
Hier der Roboter von der Seite fotografiert.

TechnoBot side view
Auf dem Bild mit der Draufsicht ist das Raspberry Pi Sense HAT gut zu erkennen.
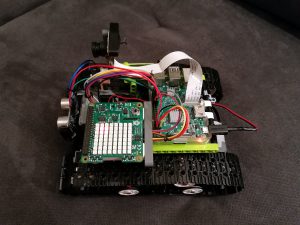
TechnoBot top view
SunFounder Roboter Auto / Roboterbausatz
- Maker: Ingmar
- Date: August 2017
- Beschreibung: Ich habe das SunFounder Roboter Auto als Bausatz ausprobiert und darüber auf meinem Blog berichtet.
- Link: SunFounder Roboterbausatz – Smart Video Car für Raspberry Pi

SunFounder Roboterbausatz Smart Video Car Kit Auto

SunFounder Roboterbausatz Smart Video Car Kit Heck
Chito 0.1
- Maker: Luis
- Date: July 2017
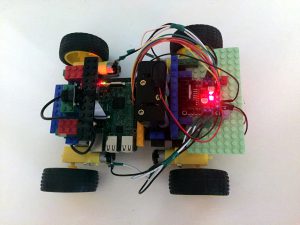
- Beschreibung: Raspberry PI 3 Roboter der aus Lego Bausteinen gebaut ist um Spaß mit der Familie zu haben! 🙂

Chito robot from maker Luis 1
Chito robot from maker Luis 2
Makeblock Ultimate V2.0
- Maker: A. Zehe
- Datum: 2017
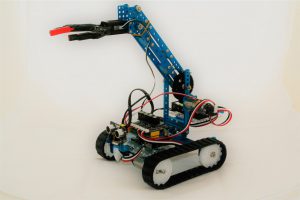
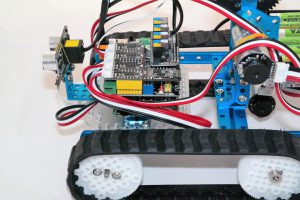
- Beschreibung: Hierbei handelt es sich um den Bausatz „Makeblock Ultimate V2.0 10-in-1 DIY Robot Kit“ von A. Zehe. Er hat diesen Roboter aufgebaut und die Bilder sowie ein Video zur Verfügung gestellt.
Makeblock-Ultimate-V2
Hier eine Nahaufnahme auf des Makeblock Ultimate V2.0 MegaPi.
Makeblock-Ultimate-V2 Makeblock MegPpi
Video Makeblock Ultimate V2
Das Video zeigt den Zusammenbau des Makeblock-Ultimate-V2 sowei wie dieser durch die Wohnung fährt und nach Gegenständen greift.
Toastbrot
- Maker: A. Redlich
- Datum: 2017
- Beschreibung: Grundlage war ein Acryl-Chassis. Jedoch nicht das für 4 Motoren, sondern nur für zwei und ein drittes Hilfsrad, damit das Chassis nicht umkippt. Mittlerweile habe ich sogar noch ein zweites Hilfsrad hinten montiert, damit Toastbrot nicht „auf den Arsch“ fallen kann.
Raspberry Pi Toastbrot Roboter 01
Wie man sieht, habe ich viel mit den „Kunststoffpfosten“ gearbeitet, die man leicht im Handel bekommt. Dadurch lassen sich die Ebenen gut übereinander stapeln und die Module / Sensoren befestigen

Raspberry Pi Toastbrot Roboter 02
HaBuRo 1
- Maker: H. Busch
- Datum: 2017
- Beschreibung: HaBuRo1, der große Bruder, ist ein Roboter für das Fahren in der Natur.
Er ist mit einem XBee-Funkmodul ausgerüstet. Autonomes Fahren und Fahrbefehle
per Touchscreen sind parallel möglich.
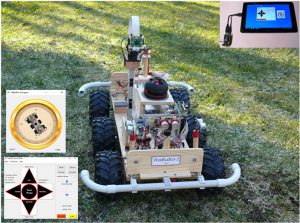
Raspberry Pi Roboter-Auto HaBuRo 1
Hier die detaillierte Draufsicht auf den HaBuRo 1
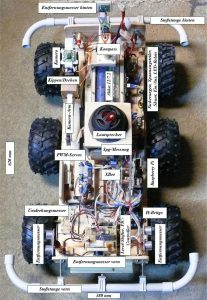
Raspberry Pi Roboter-Auto HaBuRo 1 Draufsicht
HaBuRo 2
- Maker: H. Busch
- Datum: 2017
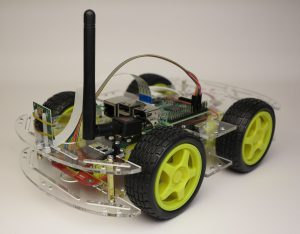
- Beschreibung: HaBuRo2 ist mein erster Roboter. Nach Vorlage: „Roboter-Autos mit dem Raspberry Pi“ gebaut.
Die Python-Programme, die man downloaden kann, wurden ohne Änderungen übernommen.
Alles funktioniert.

Raspberry Pi Roboter-Auto HaBuRo 2
Big Rob
- Maker: Ingmar
- Datum: 2017
- Beschreibung: Dieses Modell ist als Testbasis für den Einsatz einer Differential GPS Lösung entwicklet und aufgebaut worden. Verbaut ist viel an Elektronik und eine Beschreibung über den Big Rob gibt es unter dem folgenden Link.

Raspberry Pi Robot Car – Big Rob
Das Bild zeigt den Big Rob wie er bei ca. -12°C im Schnee unterwegs ist. Ich war sehr erstaunt wie geländegängig das Chasis mit den großen Modell-Rädern doch ist.

Raspberry Pi Robot Car – Big Rob snow
Big Rob Video
Das Video zeigt den Big Rob wie er im freien herum fährt.

Discoverer – Metallsuch-Fahrzeug
- Maker: Ingmar
- Datum: 2014
- Beschreibung: Das ist der Dicoverer der mit einem GPS Empfänger und einem Metall-Detektor ausgestattet ist. Er ist noch nicht wirklich geländegängig.

Discoverer with gps antenna
Discoverer Video
Das Video zeigt den Discoverer ausgestattet mit Metalldetektor unterwegs auf einem Parkplatz.

Racer
- Maker: Pete und seine Söhne
- Datum: 2015
- Beschreibung: Dieses bunte Racer wurde mit einem Raspberry Pi 2 Modell B und LEGO-Steinen aufgebaut.

Peters Racers
Cardboard Robot-Car
- Maker: Ingmar
- Datum: 2013
- Beschreibung: Das ist Ingmars erstes Cardboard Robot-Car mit einem Raspberry Pi Modell A. Ich habe das Modell aus Pappe gebaut.

Raspberry Pi – cardboard robot
Wallbreaker
- Maker: Ingmar
- Datum: 2015
- Beschreibung: Das ist Ingmars erstes Modellroboter-Auto das aus LEGO-Steinen aufgebaut wurde.

LEGO brick wheel robot Raspberry Pi – ready to rumble
Acryl Racer
- Maker: Ingmar
- Datum: 2015
- Beschreibung: Das ist ein Raspberry Pi Roboter-Auto welches aus einem Acryl-Glas Bausatz gebaut wurde. Mit solch einem Bausatz verkürzt sich die Bauzeit und die Komplexität deutlich.
Smart robot chassis Acrylic finished








Guten Tag,
ich habe Ihr Buch gekauft und jetzt alle Komponenten beisammen.
Zum Motortreiber L298N (ich habe den Treiber: WB29111-mit Jumper
für pull-up Widerstände U1,U2 usw.). Ich bin etwas unsicher mit der
Beschaltung am Raspberry Pi. Meine Frage: Müssen die Steckbrücken
für die pull-up-Widerstände entfernt werden. Auf den Fotos im Buch
ist das nicht der Fall. Jedoch möchte ich Sie fragen.
MfG
Hans Busche
Hallo Herr Busche,
so wie ich immer die Pull-Up Wiederstände bei diesem Typ von Motortreiber verstanden habe werden diese nicht entfernt.
Ich habe eine Vielzahl an Roboter-Autos mit diesem Typ von Motortreiber gebaut und noch nie einen Raspberry Pi beschädigt.
Ich freue mich das Sie ein Roboter-Auto bauen. Vielleicht zeigen Sie uns ja hier mal ein paar Bilder vom fertigen Auto.
Viele Grüße,
Maker
Herzlichen Dank für Ihre Antwort,
den Motortreiber beschalte ich dann so, wie Sie es im Buch vorgegeben haben.
Weiterhin sende ich Ihnen einige Fotos, sobald das ganze Vorhaben mit Erfolg umgesetzt
worden ist.
Grüße aus Niedersachsen
Hans Busche
Habe jetzt alles fertig und bin kurz vor der ersten Fahrt. Allerdings meldet sich der pi so:
pi@carpi:~/robot $ python RobotControl.py
Traceback (most recent call last):
File „RobotControl.py“, line 13, in
import sys, tty, termios, os, readchar
ImportError: No module named readchar
pi@carpi:~/robot $
Was kann das sein? Arbeite mit einem neuen Jessie-basierten PI …
Hallo Maximilian,
ich hatte jetzt leider selber nicht die Zeit das Problem nachzustellen. Ich vermute aber sehr stark, dass readchar nicht installiert ist oder eine Python Version die von readchar nicht unterstützt wird.
Hier findest Du mehr details zu readchar wie die Versionen: https://pypi.python.org/pypi/readchar
Mit dem folgenden Befehl ist es möglich die installierte Python Version zu überprüfen. Das „V“ ist ein groß geschriebenes V!
python -V
Wenn readchar nicht installiert ist und auch nicht Python in der Version 2.7 dann lohnt es sich Python 2.7 zu installieren und zu prüfen ob es dann geht.
sudo apt-get install python2.7
Viele Grüße,
Maker
Hallo Herr Stapel, hallo Maximilian,
das Problem mit readchar hatte ich auch.Ich habe readchar installiert und python 2.7.16. Mit dem Befehl python robot-control.py lief das Programm und ich konnte meine Jungfernfahrt durchführen.
Jetzt bin ich motiviert für Teil 2 des übrigens sehr hilfreichen Buches.
Viele Grüße
Stephan Ude
Hallo Stephan,
da freue ich mehr sehr das Du weiter gekommen bist und alles soweit klappt.
Ich wünsche Dir noch viel Spaß bei Deinem Roboter-Auto Projekt.
Viel Erfolg,
Maker
Hallo Ingmar,
mittlerweile hat mein „Karlchen“ zwei ToFs einen Sense Hat und einen touchsreen.
Leider habe ich mit den ToF s noch Probleme: wenn ich beide mit den xshuts jeweils an GPIO pin 23 bzw. 24 verbinde, gibts beim start-stop-reverse.py eine Fehlermeldung address 29 not found, schließe ich nur einen tof an, läuft das Progamm, aber es mißt natürlich nur der angeschlosse tof. i2cdetect meldet alle adressen, so wie im Buch beschrieben, bei abgestöpseltem xshuts auch die adresse 29 der tofs. Die Fehlermeldung kommt wohl von einem der vom start-stop-reverse.py aufgerufenen module read_VL53L1X.
Da bin ich aber noch nicht weitergekommen, evtl hast Du eine Idee. Gerne kann ich die Sequenz noch präzisieren.
Viele Grüße und ein schönes WE
Stephan
Hallo, ich habe von ihnen das Buch gekauft und Erfolgreich ein Robotcar gebaut.
Aber ich bräuchte einmal Hilfe, ich habe einen Ultraschallsensor angeschlossen als „Einpark Assistent“ er misst auch so wie er soll, nur wäre es irgendwie möglich das ich den Messwert neben dem Livestream zum Steuern anzeigen lassen kann ? Ich finde nichts im Internet dazu, falls einer einen Link hat wo ich mich einlesen kann wäre ich sehr dankbar 🙂
Sonst tolles Buch ! Und hoffe meiner schafft es auch in die Hall of Fame
Lieben gruß
Hallo Ingmar,
in der Hoffnung, dich hier noch erreichen zu können habe ich mittels deinem Buch versucht ein eigenes kleines Auto zu bauen. Auch wenn alles sehr gut erklärt wird, so habe ich das Problem, dass ich mittels der LN298N die Motoren nicht zum laufen bekomme. Durch mein laienhaftes Wissen ist mir erst nach stundenlanger Suche aufgefallen, dass die LN298N Brücken scheinbar einen Logikpegel von 5V haben. Der Raspberry Pi (in meinem Fall der 3B) besitzt aber nur einen Logikpegel von 3,3 Volt. Eine andere Brücke habe ich derzeit noch nicht gefunden.
Selbst die von dir in der Komponentenliste erwähnte LN298 Brücke benötigt ein Logiklevel von 5V, was mich ein wenig stutzig macht, da ich die Problematik in deinem Buch nicht erlesen kann.
Wie kann ich mit diesem Problem umgehen?
Wäre dankbar, wenn du mir da vielleicht weiterhelfen könntest.
Herzlichst,
Benjamin