
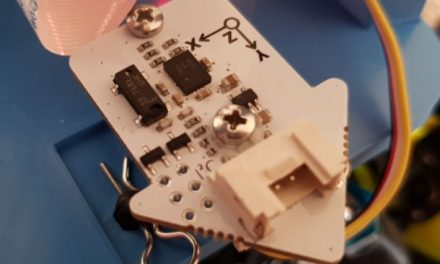
Ich wollte schon immer mal mehrere HC-SR04 Ultraschall Sensoren an einem Roboter Auto verbauen. In der Vergangenheit hatte ich Probleme mit den HC-SR04 Ultraschall Sensor wenn die Komplexität und Anzahl der Kabel zu groß wurde. Es hatte mit Fehlmessungen zu kämpfen die wohl durch Induktionen auf den Signalleitung hervorgerufen wurden. Der PiCar-S Bausatz ist weniger komplex und daher versuche ich es noch einmal mit diesen Sensoren. Ich hatte vor ein paar Wochen eine kleine Platine gebaut und kann den HC-SR04 Ultraschall Sensor mit 5V betreiben und durch die Platine ganz einfach am Raspberry Pi anschließen. Der Anschluss für den TRIG und ECHO Kanal wird jeweils direkt an die GPIO Pins des Raspberry Pi angeschlossen. Die Anleitung für die kleine Platine findet sich im folgenden Post: Entfernungsmessung mit dem HC-SR04 Ultraschall Sensor und einem Raspberry Pi
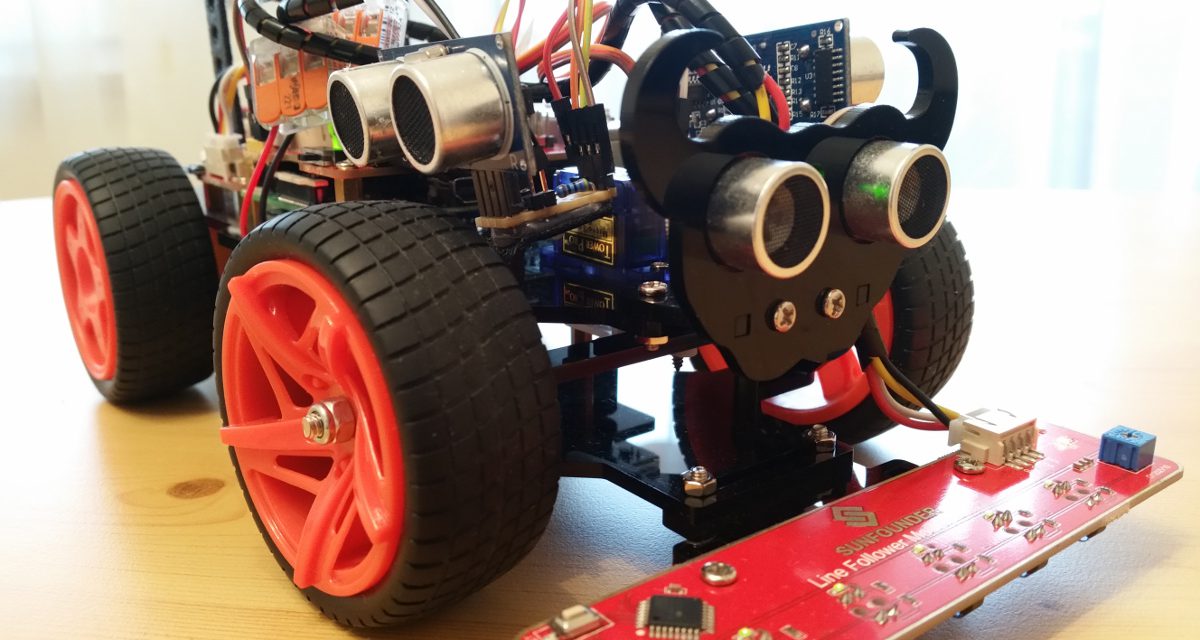
Das folgende Bild zeigt das SunFounder PiCar-S mit den zusätzlich links und rechts angebrachten Ultraschall Sensoren.
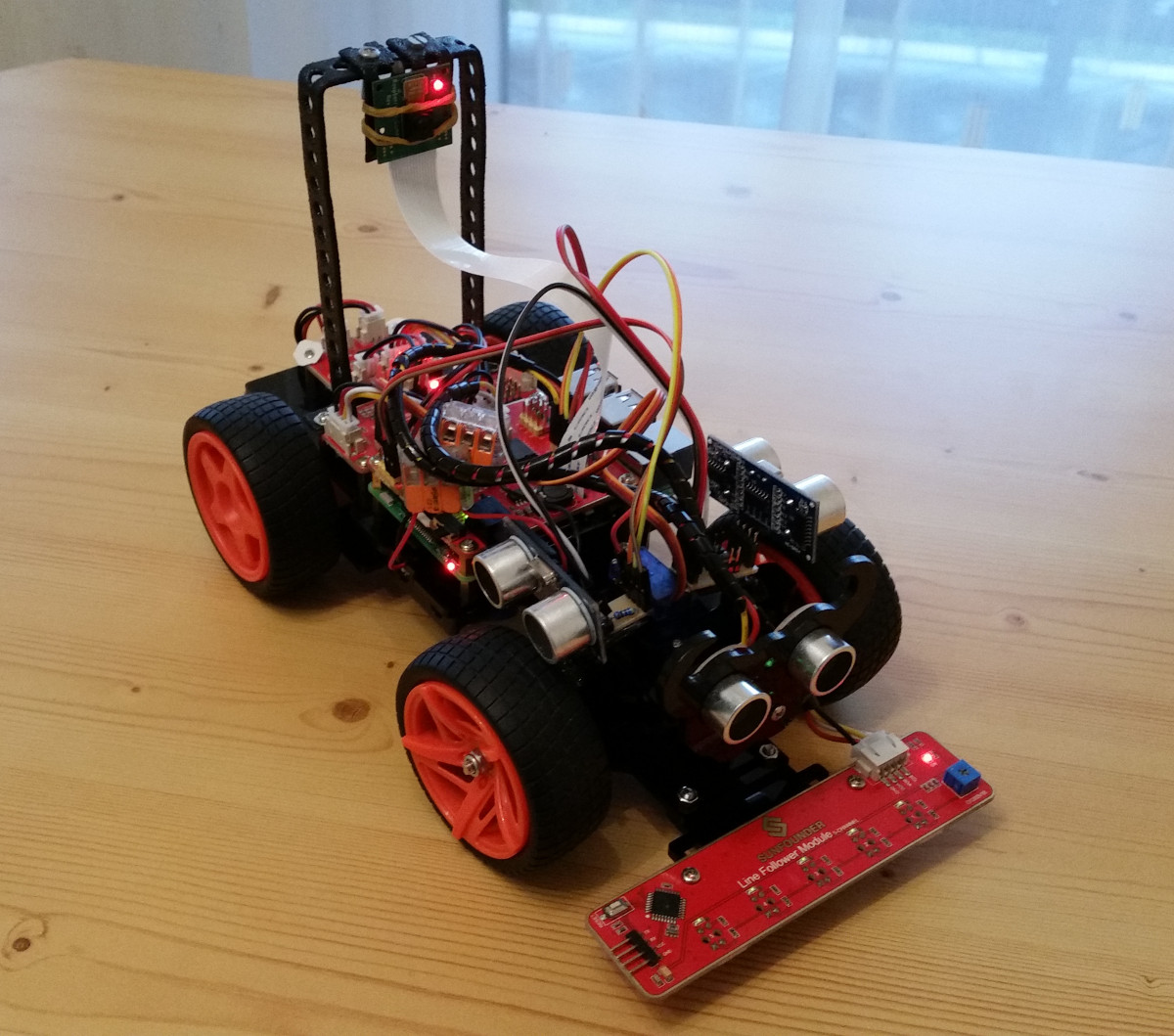
SunFounder-PiCar-S – zusätzliche Ultraschall Sensoren
Ich habe die beiden zusätzlichen Ultraschall Sensor jeweils an einer der vielen Schrauben mit denen die Lenkung befestigt ist mit befestigt. So kann ich diese auch etwas drehen also z. B. um 45° in die Fahrtrichtung und nicht nur um 90° gedreht zu der Fahrrichtung des Roboter Autos. Hier ist das Chassis des Bausatzes wirklich sehr gut geeignet um weitere Anbauteile zu befestigen.
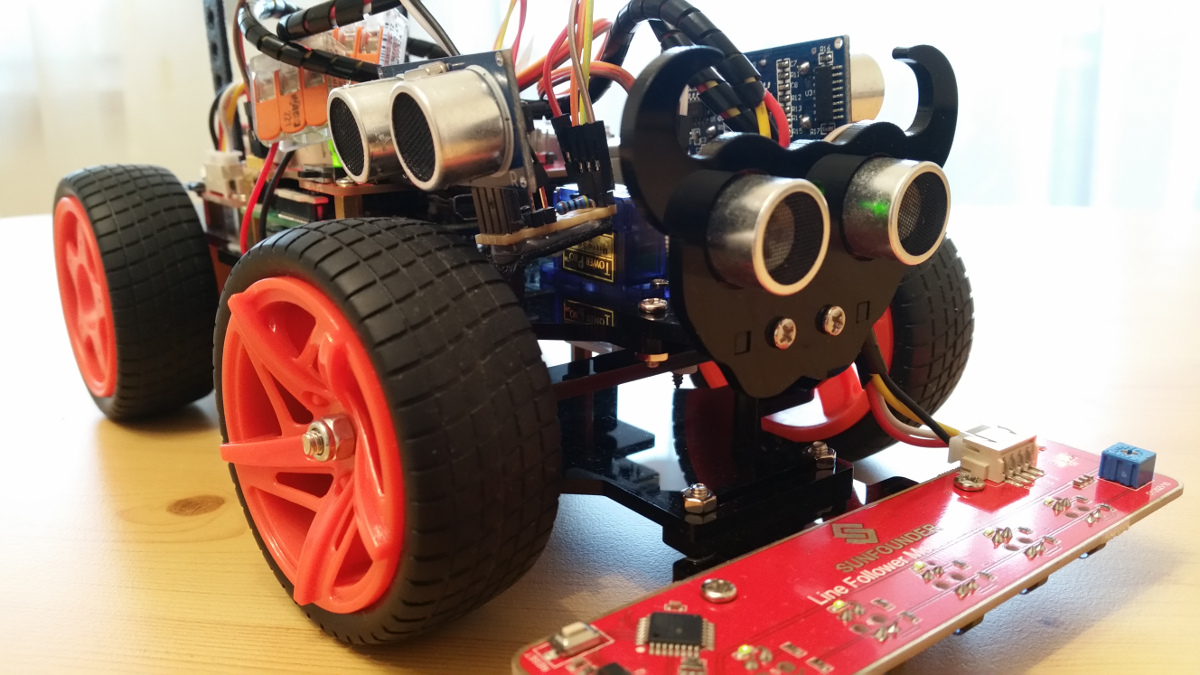
SunFounder-PiCar-S – zusätzliche Ultraschall Sensoren Detailsicht
Das folgende Bild zeigt noch einmal eine Detailaufnahme der beiden kleinen Platinen mit den Ultraschall Sensoren.

SunFounder-PiCar-S – zusätzliche Ultraschall Sensoren Verkabelung
[DE_BOOK_DETAIL DE_BOOK_DETAIL=““]
Python Programm
Ich habe ein kleines Python Programm geschrieben mit dem das PiCar-S die drei Ultraschall Sensoren für die Steuerung verwendet. So kann das PiCar-S deutlich besser Hindernissen ausweichen. Ich habe in dem Menü, das zu Beginn startet, zwei Einträge vorgenommen die einmal einen Beschleunigungsrennen entlang einer Wand ermöglichen und einem Labyrinth Modus um Hindernissen auszuweichen.
Die Programm wird es wenn etwas optimiert auf meinem GitHub Account geben. GitHub
Video
Das Video zeigt das PiCar-S wie es durch die Wohnung fährt. Am Ende vom Video sind noch die Fehlversuche zu sehen.

Zusammenfassung
Es ist sehr spannend zu sehen wie viele Sensoren nötig wären um sicher Hindernisse zu erkennen, deren exakte Position zu bestimmen um eine neue Route festzulegen. Das von mir geschriebene Programm macht eigentlich nicht viel mehr als zu zeigen wie es technischen funktionieren kann. Dafür klappt es schon ganz gut kann aber noch wie so oft optimiert werden.
Artikel Übersicht SunFounder PiCar-S Roboter Auto Bausatz:
SunFounder Roboter Auto Picar-S Bausatz – EinleitungSunFounder Roboter Auto Picar-S Bausatz – Verkabelung und Softwareinstallation
SunFounder Roboter Auto PiCar-S Bausatz – Programmier-Spaß
SunFounder Roboter Auto PiCar-S Bausatz – Ultraschall Sensor
SunFounder Roboter Auto PiCar-S Bausatz – zusätzliche Ultraschall Sensor











Recent Comments