

OpenBot – Dein Smartphone steuert ein Roboter Auto – Arduino Firmware aufspielen
Jetztmuss die Arduino Entwicklungsumgebung eingerichtet werden muss damit Du die Software auf den...
Weiterlesen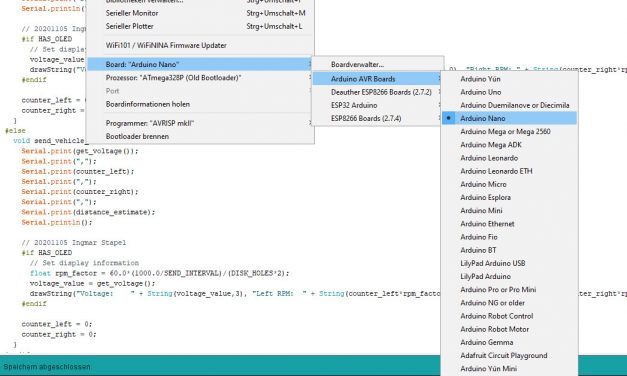
Jetztmuss die Arduino Entwicklungsumgebung eingerichtet werden muss damit Du die Software auf den...
Weiterlesen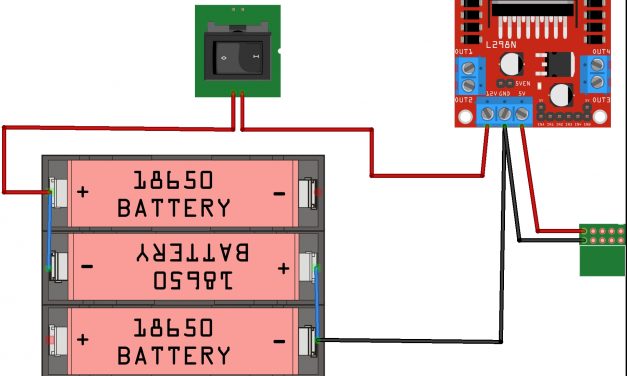
Nach dem jetzt alle elektronischen Komponenten im frisch aufgebauten Chassis unterbracht sind geht...
Weiterlesen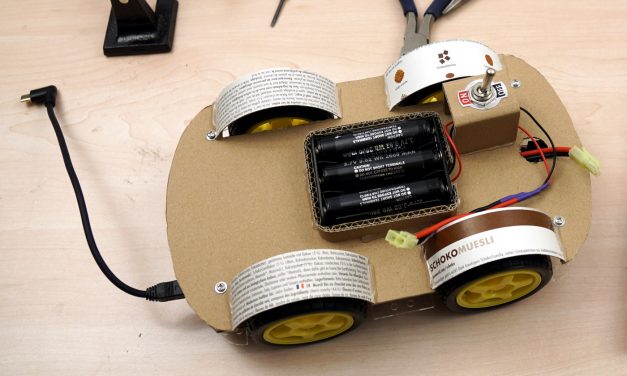
Für den Bau des Chassis des OpenBot Roboter Autos setze ich auf das 4WD Smart Car Chassis statt...
Weiterlesen
Es gab in den letzten Jahren immer wieder Projekte die ein Smartphone für die Steuerung eines...
Weiterlesen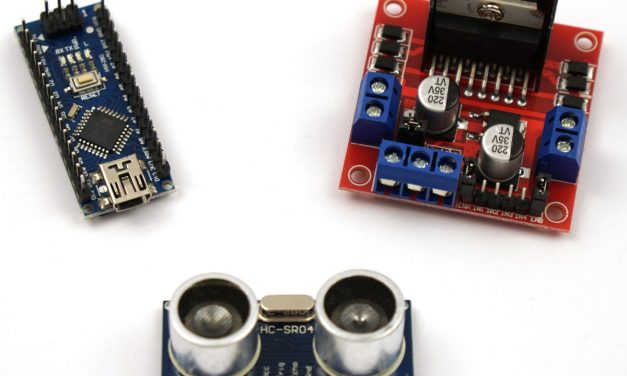
In diesem Beitrag geht es jetzt zunächst einmal um die Stromversorgung des OpenBot und um die...
WeiterlesenRoboter-Autos mit dem Raspberry Pi

Recent Comments