


Ich hatte die Idee ein Raspberry Pi Amphibien all-terrain Roboter Fahrzeug al sein up-cycling Projekt zu bauen. In unserem täglichen Leben verwenden wir Plastikflaschen, Boxen, Schaumstoff etc. und viele dieser Plastiksachen werden weggeworfen. Ich habe mir über dieses Problem der Menschheit Gedanken gemacht und damit angefangen interessante Boxen und Flaschen zu sammeln um etwas Neues zu bauen. Das ist die Idee hinter up-cycling etwas neues zu erschaffen.
Okay, ich habe den Vorteil, dass ich schon viele Roboter gebaut habe. Das ist auch der Grund warum ich zwei Getriebemotoren, einen Motortreiber und Räder übrig habe die ich aktuell nicht verbaut habe.
Das folgende Bild zeigt die wichtigsten Teile aus denen ich mein Amphibien Fahrzeug bauen möchte.

Raspberry Pi amphibious all terrain robot vehicle
Schlüssel Funktionen
Das Amphibien Fahrzeug verwendet einen Raspberry Pi um den Motortreiber zu steuern und um ein live Video zu übertragen. Um die Räder anzutreiben verwende ich zwei Gleichstrommotoren, die ausreichend Kraft haben um an Land und im Wasser fahren zu können. Der Schaumstoff wird verwendet um das Amphibien Fahrzeug schwimmfähig zu machen. Eine alte Gummibären Box verwende ich als wasserdichtes Gehäuse für die Elektronik. Zwei RC-Akkus werden eingesetzt um den Raspberry Pi und die 12 V Motoren mit Strom zu versorgen.
Raspberry Pi Roboter-Auto Komponentenliste
Wenn ich jetzt das Interesse wecken konnte am Bau eines Roboters zusammen mit einem Raspberry Pi der findet auf meinem Blog eine Komponentenliste. Diese Komponentenliste listet die elektronischen Komponenten oder fertigen Raspberry Pi Bausätze auf die ich selber mit gutem Gewissen weiterempfehlen kann. Die meisten aufgezählten Komponenten kommen in meinen Modellen zum Einsatz und wurden so durch mich auf Funktion und Kompatibilität mit dem Raspberry Pi hin geprüft.
Hier der Link auf die Komponentenliste: Komponentenliste

ZeroBorg motor controller - robot-car components
Zusammenbau der Steuereinheit
Für die Elektronik des Amphibien Fahrzeuges verwende ich eine runde Plastikbox mit zwei Pappe lagen. Die erste Pappe liegt am Boden der Box. Auf dieser werden die beiden Akkus befestigt. Die zweite Pappe Lage liegt auf den Akkus und auf dieser werden der Raspberry Pi, der Motortreiber und der Spannungswandler befestigt.
Da folgende Bild zeigt die erste Pappe Lage für die beiden Akkus.

Raspberry Pi amphibious all terrain robot vehicle accu
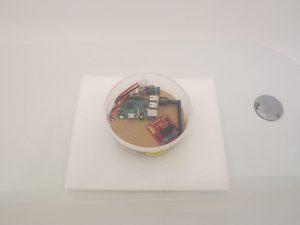
Die zweite Lage mit dem Raspberry Pi und den anderen elektronischen Komponenten ist im folgenden Bild zu sehen.

Raspberry Pi amphibious all terrain robot vehicle components
Schwimmkörper aus Schaumstoff
Der Schaumstoff wird dazu verwendet, damit dass Amphibien Fahrzeugt im Wasser schwimmen kann. Der Schaumstoff ist stabil genug um an diesem die beiden Getriebemotoren befestigen zu können, die wasserdichte Box mit der Elektronik und weitere Anbauteile die jedes DIY Projekt erst richtig cool machen.

Raspberry Pi amphibious all terrain robot vehicle foam
Räder als Paddel
Für ein Amphibien Fahrzeug ist es typisch, dass dieses schwimmen kann und am Land fahren kann. Das ist der Grund warum ich über Räder mit Paddeln nachdenken musste die stabil genug sind um an Land fahren zu können und die das Fahrzeug im Wasser vorantreiben. Ich verwende zwei Räder die ich schon gekauft hatte für einen out-door Roboter den ich letztes Jahr gebaut hatte. Ich werde die Räder weiter verwenden und ein paar Paddel an diesen anbringen um das Amphibien Fahrzeugt auch im Wasser antreiben zu können.

Raspberry Pi amphibious all terrain robot vehicle wheel paddles
Kotflügel
Um das Amphibien Fahrzeug vor dem spritzenden Wasser zu schützen habe ich über eine Art Kotflügel nachgedacht. Ich werde solch einen grünen Pflanzuntersetzer verwenden. Ich werde nur einen Untersetzer verwenden den ich halbieren werde. Mit der grünen Farbe hoffe ich, dass das Amphibien Fahrzeug gut aussieht.

Raspberry Pi amphibious all terrain robot vehicle saucer
Getriebemotoren Gehäuse
Um die Motoren zu schützen habe ich diese in kleine Aufputz Dosen verbaut die dem Standard IP57 entsprechen. Ich hoffe so sind die Motoren vor Spritzwasser ausreichend geschützt. Um die Motoren in die Aufputz Dosen verbauen zu können muss ich ein paar Löcher in die Dosen bohren. Jeweils eines für die Antriebsachse, zwei für die Motorenbefestigung und ein Loch für das Stromkabel. Vielleicht werde ich das Loch für die Kabel mit etwas Klebstoff aus der Heißklebepistole verschließen.
Zusammenbau
Der Schaumstoff ist die Basis für alle weiteren Teile. Ich bin mir nicht sicher ob der Schaumstoff zu weich ist. Aber ich hoffe die runde Plastikbox wird en Schaumstoff etwas stabilisieren. Das nächste Bild zeigt ein paar Bauteile und wie ich diese anbringen möchte.

Raspberry Pi amphibious all terrain robot vehicle plastic box
Die Plastikbox mit den Batterien und den weiteren Elektronischen Bauteilen ist sehr schwer für den Schaumstoff. Für den ersten Test werde ich die Box in der Mitte des Schaumstoffes befestigen. Ich hoffe der Schaumstoff schwimmt zusammen mit der Box und versinkt nicht.
Das folgende Bild zeigt den ersten Test in der Badewanne der erfolgreich war.
Raspberry Pi amphibious all terrain robot vehicle floating plastic box
Jetzt habe ich die beiden Getriebemotoren zusammen mit jeweils einem Teil des Untersetzers in die Aufputz Dosen verbaut. Ich hoffe so sind die Motoren ausreichend vor Spritzwasser geschützt.

Raspberry Pi amphibious all terrain robot vehicle surface box and saucer
Der nächste Schritt ist die fertig zusammengebauten Paddel- Räder zusammen mit jeweils einem halben Untersetzter auf jeder Seite des Schaumstoffes zu befestigen. Dazu werde ich die Heißklebepistole verwenden und den Untersetzer am Schaumstoff fest zu kleben.

Raspberry Pi amphibious all terrain robot vehicle surface box and saucer finished
Der Schaumstoff der normalerweise verwendet wird um Heizungsrohre zu isolieren soll das Auto schneller im Wasser Machen. Ich werde ein paar Stücke an der Vorderseite und Rückseite befestigen. So sollte das Auto schnittiger im Wasser liegen. Aber ich hatte so meine Probleme den Schaustoff festgeklebt zu bekommen. Die Hitze der Heißklebepistole hat diesen zusammen schmelzen lassen.
Raspberry Pi Kamera
Für das live Video habe ich eine Raspberry Pi Kamera installiert. Ich empfehle hier eine Kamera mit Weitwinkelobjektiv. Das Profil des Amphibien Fahrzeuges ist sehr niedrig und mit einer normalen Kamera hat man deshalb überhaupt keine gute Übersicht des Umfeldes.

Raspberry Pi amphibious all terrain robot vehicle surface box with camera
Schwimmtest
Alle Komponenten sind angebracht und der Raspberry Pi ist mit Jumper-Kabeln am Motortreiber angeschlossen. Jetzt ist es an der Zeit für einen ersten Test im Bad. Die Box mit der Batterie und dem Raspberry Pi ist jetzt noch nicht am Schaumstoff festgeklebt. Ich habe diese nur so auf den Schaumstoff gestellt um sie in der Position noch verändern zu können. Ich muss erst noch die richtige Position für eine gute Gewichtsverteilung herausfinden.
Das folgende Bild zeigt den ersten Test in der Badewanne.

Raspberry Pi amphibious all terrain robot vehicle floating test
Das Video zeigt den Test und ob der Schaumstoff schwimmt oder nicht.

Das folgende Video zeigt das fertig aufgebaut Amphibien Roboter Auto in Aktion in der Badewanne.

[DE_BOOK_DETAIL DE_BOOK_DETAIL=”DE_BOOK_DETAIL”]







Recent Comments