


Nach ca. 2 Jahren Arbeit habe ich es geschafft, ein Roboter-Auto zu bauen, dass autonom durch den Garten fahren kann. Dabei verarbeitet es die Informationen verschiedener Sensoren und kombiniert diese. Das erste Modell für drausen war der Roboter mit dem Namen Discoverer der mit einem Metalldetektor ausgestattet war. Die Herausforderungen die ich nach wie vor hatte waren der Antrieb, die Stromversorgung, die Integration der Sensoren und die Entwicklung der Software für die Steuerung des Roboter-Autos. Das Gehirn des Roboters bildet ein Raspberr Pi 3 Model B Computer. Er ist ideal für die Steuerung eines Roboters.
Das folgende Bild zeigt das Roboter-Auto welches ich aus einer alten Diskettenbox gebaut habe und aktuell als kompakter Versuchsträger von mir eingesetzt wird. Einen Bausatz dieser Größer für einen Roboter habe ich noch nicht gesehen.

Raspberry Pi self-driving Roboter-Auto 4
Auf dieser Nahaufnahme ist sehr schön die Diskettenbox zu erkennen. Als Recheneinheit und Gehirn des Roboter-Autos kommt in diesem Modell wieder ein Raspberry Pi 3 Modell B zum Einsatz. Oberhalb von dem Schloss der Diskettenbox im Inneren sitzt die Raspberry Pi Kamera für das Live-Video Streaming heraus aus dem Roboter.

Raspberry Pi self-driving Roboter-Auto 1
Raspberry Pi Roboter-Auto Komponentenliste
Wenn ich jetzt das Interesse wecken konnte am Bau eines Roboters zusammen mit einem Raspberry Pi der findet auf meinem Blog eine Komponentenliste. Diese Komponentenliste listet die elektronischen Komponenten oder fertigen Raspberry Pi Bausätze auf die ich selber mit gutem Gewissen weiterempfehlen kann. Die meisten aufgezählten Komponenten kommen in meinen Modellen zum Einsatz und wurden so durch mich auf Funktion und Kompatibilität mit dem Raspberry Pi hin geprüft.
Hier der Link auf die Komponentenliste: Komponentenliste

ZeroBorg motor controller - robot-car components
[DE_BOOK_DETAIL DE_BOOK_DETAIL=“DE_BOOK_DETAIL“]
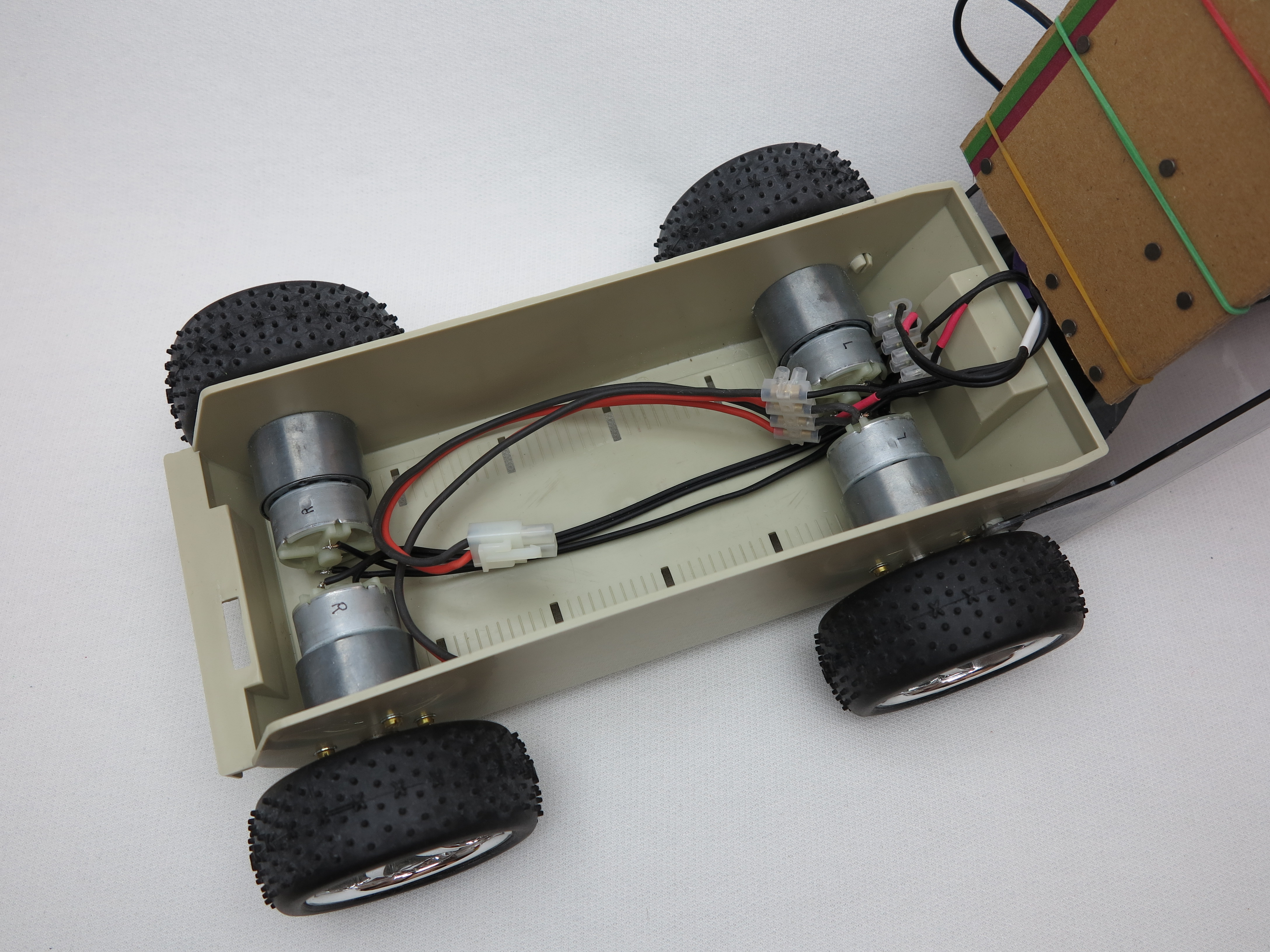
Getriebe-Motoren
Die verbauten Getriebe-Motoren sind etwas zu schwach für das grobe Profil der Reifen des Roboters. Da das Roboter-Auto sich dreht wie ein Raupenfahrzeug, benötigt es sehr viel Kraft im hohen Gras um auf der Stelle drehen zu können. Diese Kraft haben die verbauten Getriebe-Motoren nicht und so musste ich die Räder mit Klebeband umwickeln damit diese leichter im Gras rutschen und so das Drehen des Roboters überhaupt möglich wurde.
Raspberry Pi self-driving Roboter-Auto 15
Auf dieser Seitenaufnahme sind der GPS-Empfänger zu erkennen sowie die externe W-LAN Antenne die eine Verstärkung des W-LAN Signals von ca. 12 dB ermöglicht. Das ist auch wichtig, da das W-LAN Signal sehr schnell schwach wird sobald der Roboter vom Router weg fährt.

Raspberry Pi Roboter-Auto
Sensoren im Roboter-Auto
Ich habe verschiedene Sensoren im Roboter-Auto verbaut die das autonome Fahren ermöglich. Oberhalb des Roboter-Autos auf dem weißen PVC Rohr sitzt das Raspberry Pi Sense-HAT. Verbaut in dem Sense-HAT sind die folgenden Sensoren:
- Beschleunigung Sensor
- Gyroskop
- Kompass / Magnetometer
- Luftdruck Sensor
- Temperatur Sensor
- Luftfeuchte Sensor
Das Sense-HAT verfügt neben den Sensoren noch über eine 8×8 RGB LED Matrix und einem kleinen Joystick.
Als Abgedeckt für das Sense-HAT habe ich einen leeren Joghurtbecher verwendet. So ist es gegen Staub und Feuchtigkeit geschützt.

Raspberry Pi self-driving Roboter-Auto 3
Zu den Sensoren des Raspberry Pi Sense-HAT kommt noch der GPS Empfänger hinzu. Hier habe ich ein paar GPS-Empfänger ausprobiert und bei diesem Versuchsaufbau einen „Adopt SkyTraQ “ mit Venus8 Chipsatz als GPS-Empfänger verwendet.
Auf die SRF08 Ultraschall Sensoren habe ich in diesem Modell noch verzichtet da ich keine Werkstatt habe und die Diskettenbox nur schwer bearbeiten kann. Aber spannend wäre es schon für den Betrieb im Freien das Roboter-Auto zusätzlich mit Ultraschall Sensoren auszustatten.
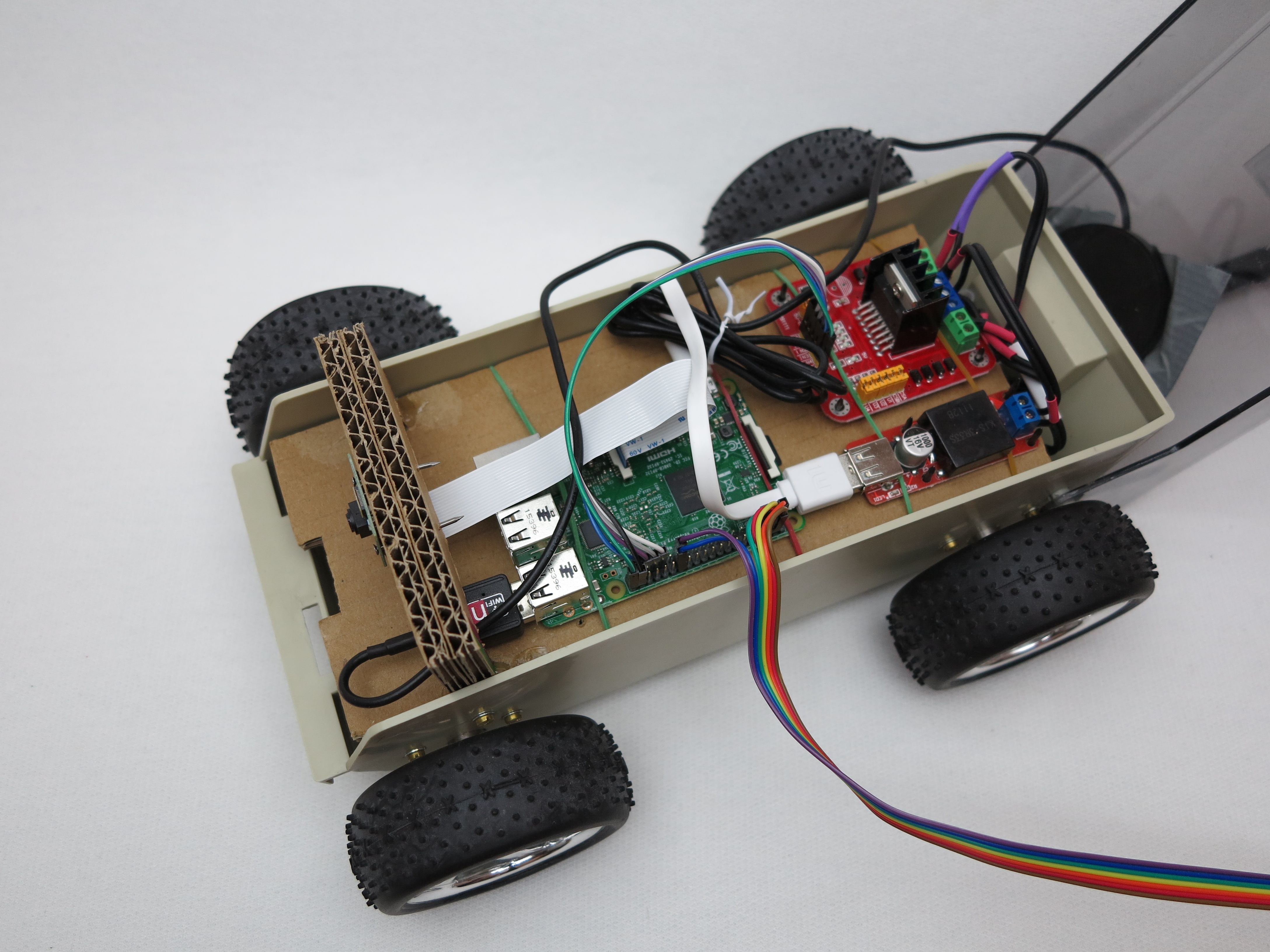
Aufnahme von Innen
Auf dem Elektronikträger, den ich wieder aus Pappe aufgebaut, habe sitzt der Raspberry Pi, der Motortreiber und der Step-Down-Converter. Zum Teil habe ich die Komponenten etwas befestigt damit diese auf der Pappe fest sitzen. Sehr gut eigenen sich hierfür Gummis oder Nägel die ich durch die Bohrungen der kleinen Platinen in die Pappe gesteckt habe.
Raspberry Pi self-driving Roboter-Auto 14
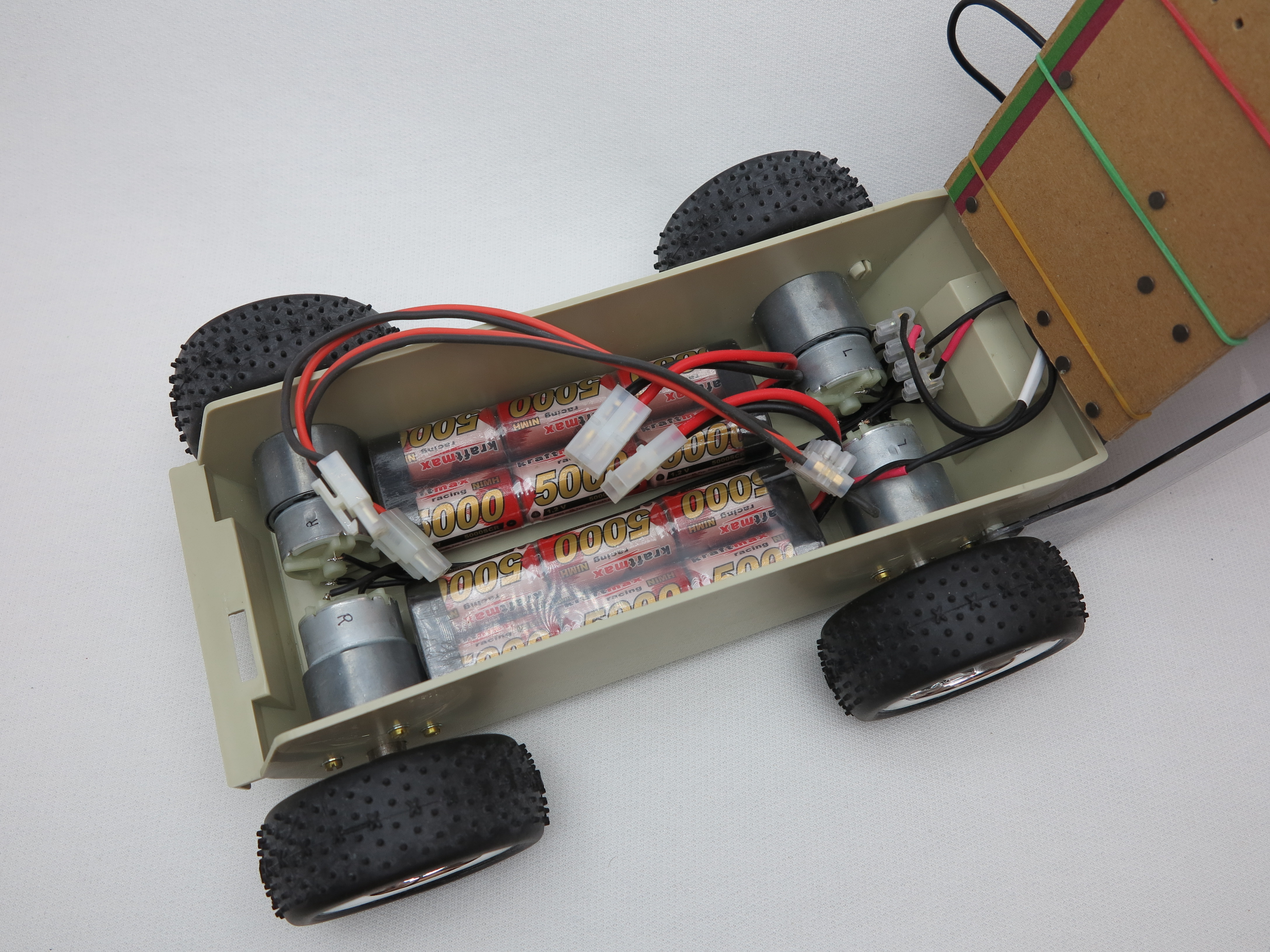
Stromversorgung
Unter dem Elektronikträger liegen die beiden RC-Akkus die ich in Reihe geschalten habe. Diese versorgen das Roboter-Auto zuverlässig mit 14,3 Volt und mit mit 5.000 mAh Strom. Die Akkus liegen genau zwischen den Getriebe-Motoren und sorgen so für eine gute Gewichtverteilung. Die beiden Akkus reichen aus um mit dem Roboter-Auto ca. 30 bis 45 Minuten fahren zu können. Die Räder stammen aus einem RC-Modellbaugeschäft und sind mit entsprechenden Adaptern direkt auf der Motorachse befestigt.
Raspberry Pi Roboter-Auto 16
Video – autonom fahrendes Roboter-Auto
Ein Video von dem Diskettenbox Roboter-Auto wie dieser durch den Garten fährt habe ich auch auf YouTube hochgeladen. Schön zu sehen ist im Video auch der Live-Video Stream auf meinen Laptop von dem aus ich das Roboter-Auto bequem kontrollieren konnte.

Zusammenfassung
Ich bin sehr zufrieden mit den verbauten elektronischen Komponenten. Der Raspberry Pi eignet sich hervorragend für kleine Roboter-Projekte wie diesem autonom Fahrenden Roboter-Auto. Das verfügbare Zubehör wie das Sense-HAT wird durch das Betriebssystem Raspbian perfekt unterstützt und ermöglicht eine einfache Programmierung des Roboters. Der GPS-Empfänger zusammen mit den GPS-Tools machte unter Raspbian / Linux keine Probleme und ermöglichte erst das Fahren nach GPS-Koordinaten. Mit kleineren Lötarbeiten konnte ich das Sense-HAT oberhalb des Roboters anbringen und habe dazu ein Flachbandkabel mit entsprechenden Steckern versehen.












Recent Comments