


Ich hatte mir alle Bauteile in Ruhe angeschaut und auf meinem großen Schreibtisch ausgebreitet. Da ich diese Acryl-Glas Gehäuse bereits mehrfach in Roboter Autos verbaut habe, war mir der Aufbau und das Vorgehen nichts ganz neues. Die Anleitung des Duckietown Projektes wie das Roboter Auto zusammen gebaut wird ist auch sehr schön beschrieben mit vielen Bildern. Allerdings ist diese in der Reihenfolge nicht ganz ideal. Vielleicht lag es an mir oder doch an einer nicht ganz klaren Beschreibung denn ich musste hin und wieder Bauteile abnehmen und weitere hinzufügen zu können. Aber wie auch immer das Zusammenbauen hat sehr gut geklappt und war nach ca. 2 Stunden erledigt.
Die Beschreibung wie der Duckiebot und die Duckietown aufgebaut wird ist nur in Englischer Sprache verfügbar. Die aktuellen Anleitungen finden sich immer hier: https://docs.duckietown.org/
Duckiebot zusammenbauen
Ich empfehle sich erste einmal mit der Anleitung für den Zusammenbau des Duckiebots vertraut zu machen. Es schadet nicht sich diese komplett einmal durchzulesen. So versteht man was wie in welcher Reihenfolge zusammengebaut werden muss.
Für den Zusammenbau des Duckiebot habe ich die folgende Anleitung verwendet: Assembling the DB18 Duckiebot
Das folgende Bild zeigt die Bodengruppe des Chassis mit den beiden DC Getriebe-Motoren. Diese Komponenten werden zu erst zusammen gebaut.
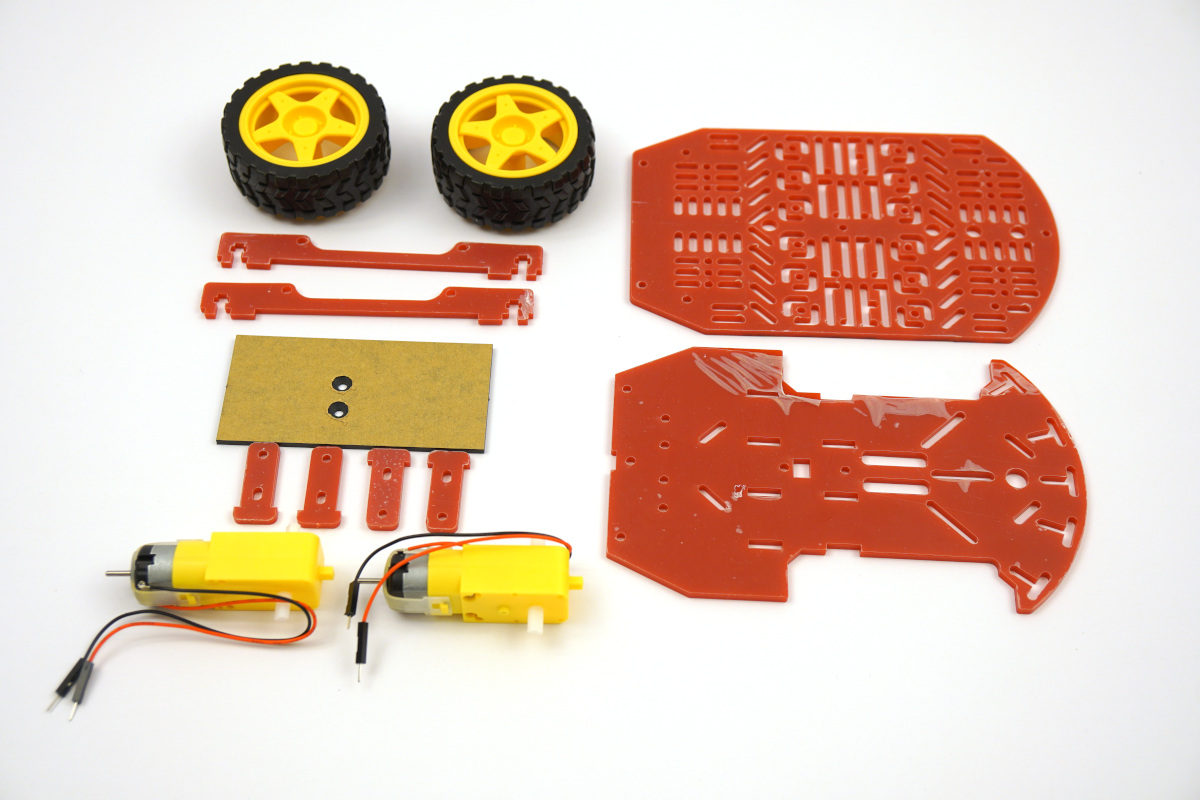
Duckietown Duckiebot chassis components
Es schadet nicht, wenn man eine kleine flache Metallfeile sich bereit legt. Denn die viel kleinen Acryl-Halter für die Motoren haben nicht in die dafür vorgesehenen Schlitze in der Bodenplatte gepasst. Hier musste ich diese etwas erweitern also mit der Feile breiter machen, damit die Halter in die Schlitze rutschen konnten.
Anschließend konnte ich ohne Probleme die Motoren befestigen und verschrauben. Die beiden Räder werden anschließend einfach aufgesteckt. Das kleine Kugel-Rad im Heck des Roboter Autos ebenfalls mit zwei langen Abstandshaltern an der Bodenplatte befestigt.

Duckietown Duckiebot chassis mounted DC motors bottom view
Soweit zusammengebaut kann das Roboter Auto auf den drei Rädern stehen. Anschließend werden die vier Abstandshalter für die zweite Acrylplatte montiert.
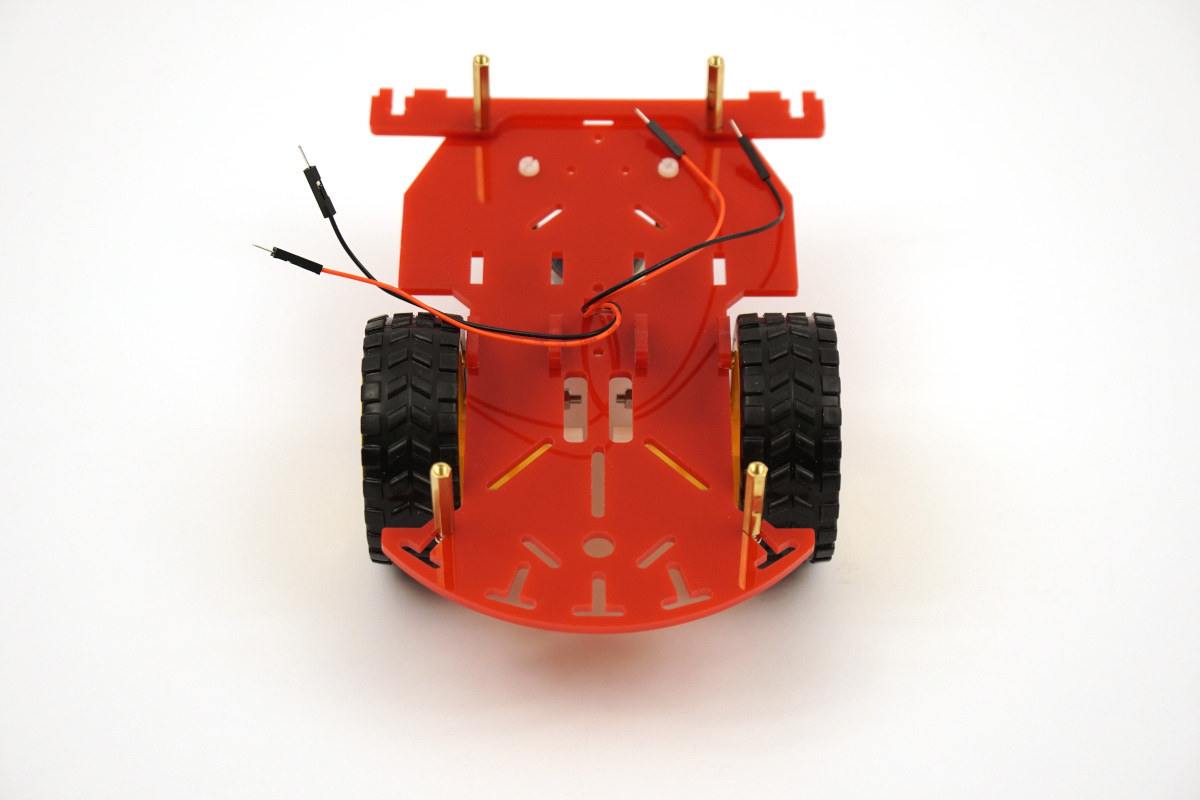
Duckietown Duckiebot chassis mounted DC motors
Die Kamera wird vorne am Roboter befestigt. von der Anleitung her ist es vorgesehen, dass der Raspberry Pi zwischen der oberen und unteren Acryl-Platte befestigt wird. Das fand ich nicht ideal gelöst, da ich so die micro-SD Karte kaum heraus ziehen konnte und das CSI Kabel für die Kamera auch keine schöne Führung hatte.

Duckietown Duckiebot chassis camera mount
Nach der Anleitung soweit aufgebaut sieht der Duckiebot jetzt wie auf dem folgenden Bild gezeigt aus. Das CSI Kabel hatte ich wieder abzogen da es doch recht geknickt war. Dazu muss man allerdings wieder die obere Platte abschrauben da man sonst nicht an den Anschluss heran kommt um den Verschluss zu lösen.

Duckietown Duckiebot chassis mounted chassis Raspberry Pi original setup
Ich habe jetzt versucht den Raspberry Pi oben auf die Acryl Platte zu befestigen umso besser an diesen heran zu kommen. Wichtig dabei ist, dass man den Raspberry Pi soweit wie möglich hinten am Duckiebot befestigt. denn die Power-Bank muss ja auch noch einen Platz finden.

Duckietown Duckiebot chassis Raspberry Pi mounted on top
So modifiziert müssen die vier Kabel für die beiden Motoren von unten nach oben durchgesteckt werden. Damit das klappt musste ich eine kleine Nut in das Acryl-Glas feilen. Diese kleine Modifizierung ist auf dem nachfolgenden Bild gut zu sehen.
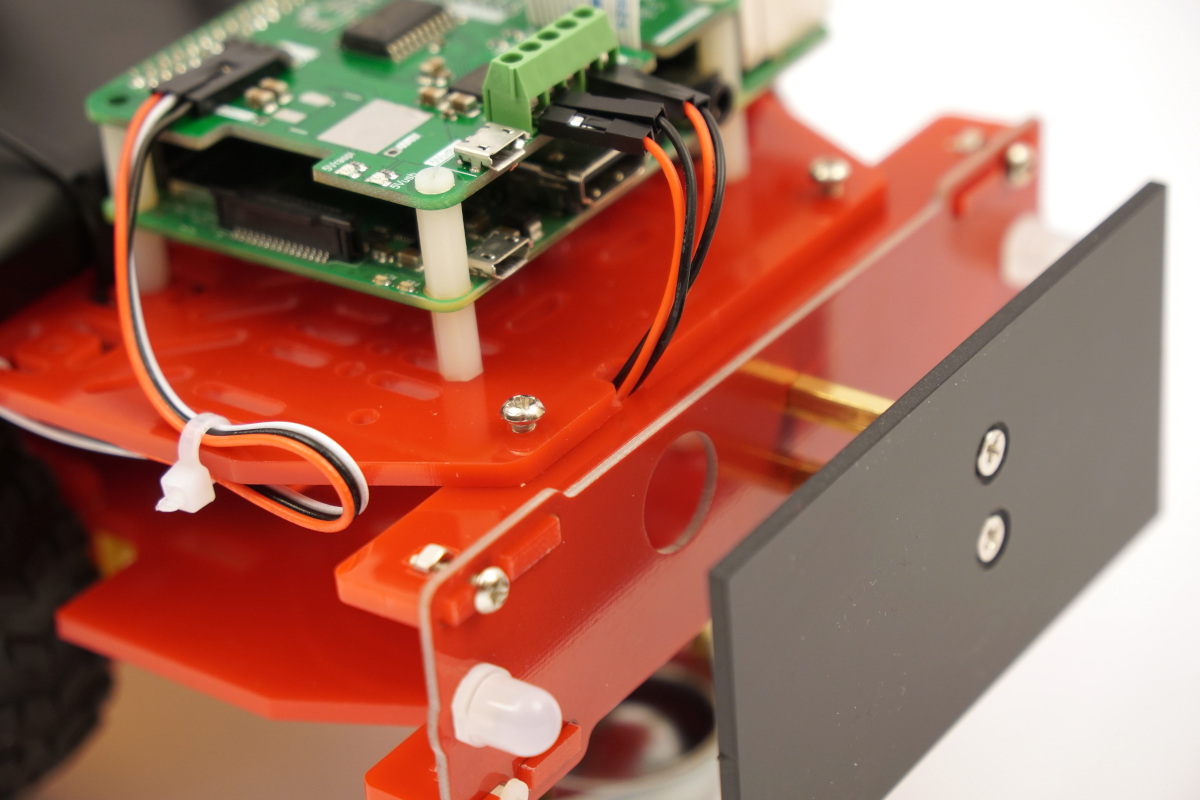
Duckietown Duckiebot ready to rear view
Mit der Power-Bank und fertig aufgebaut sieht der Duckiebot jetzt wie folgt aus. Die LED Leuchten strahlen hell direkt nach dem Einschalten. Noch habe ich auf die SD Karte keine Software aufgespielt.
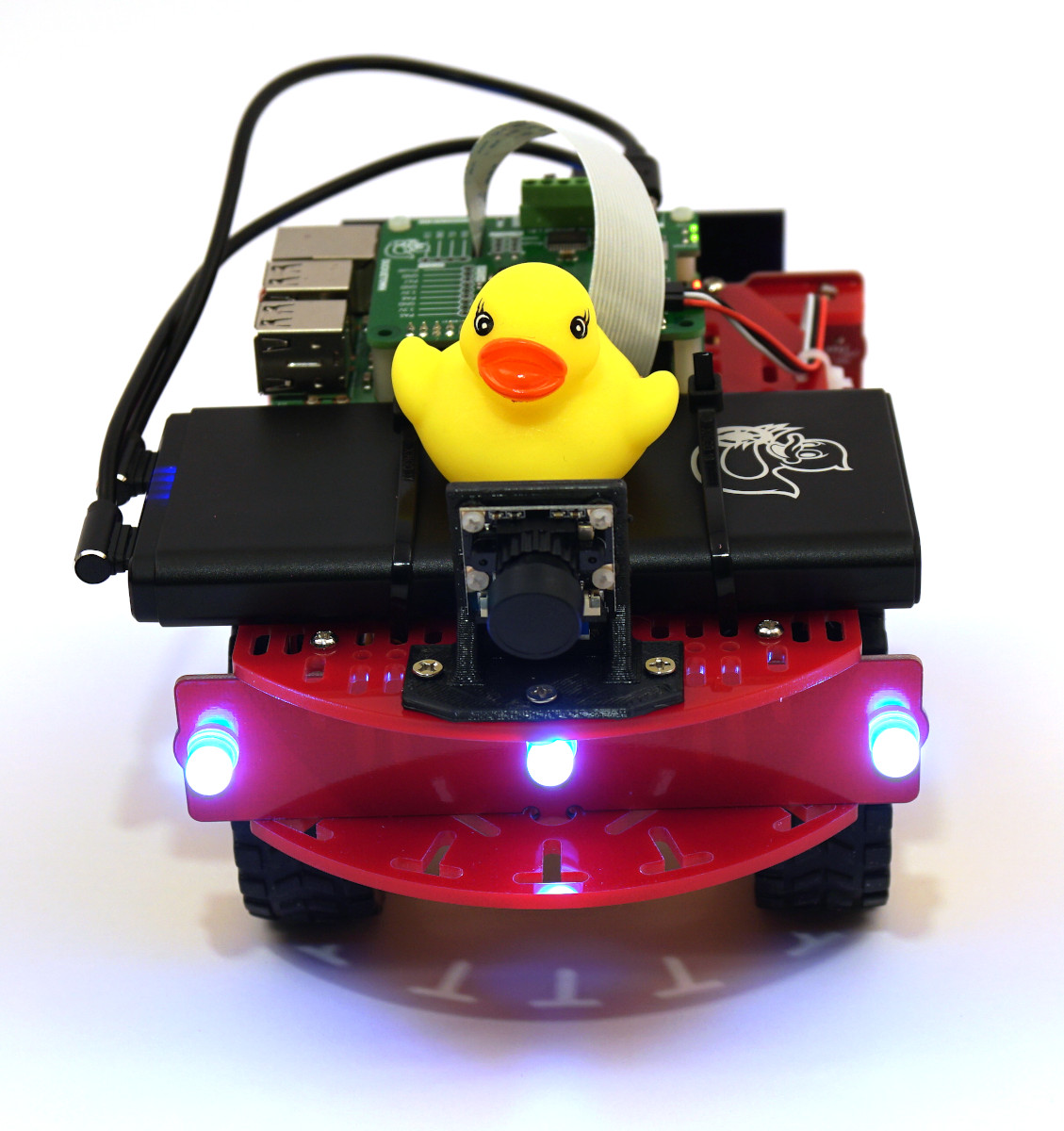
Duckietown Duckiebot ready to run
Hier noch ein Bild des Duckiebots von der Seite.
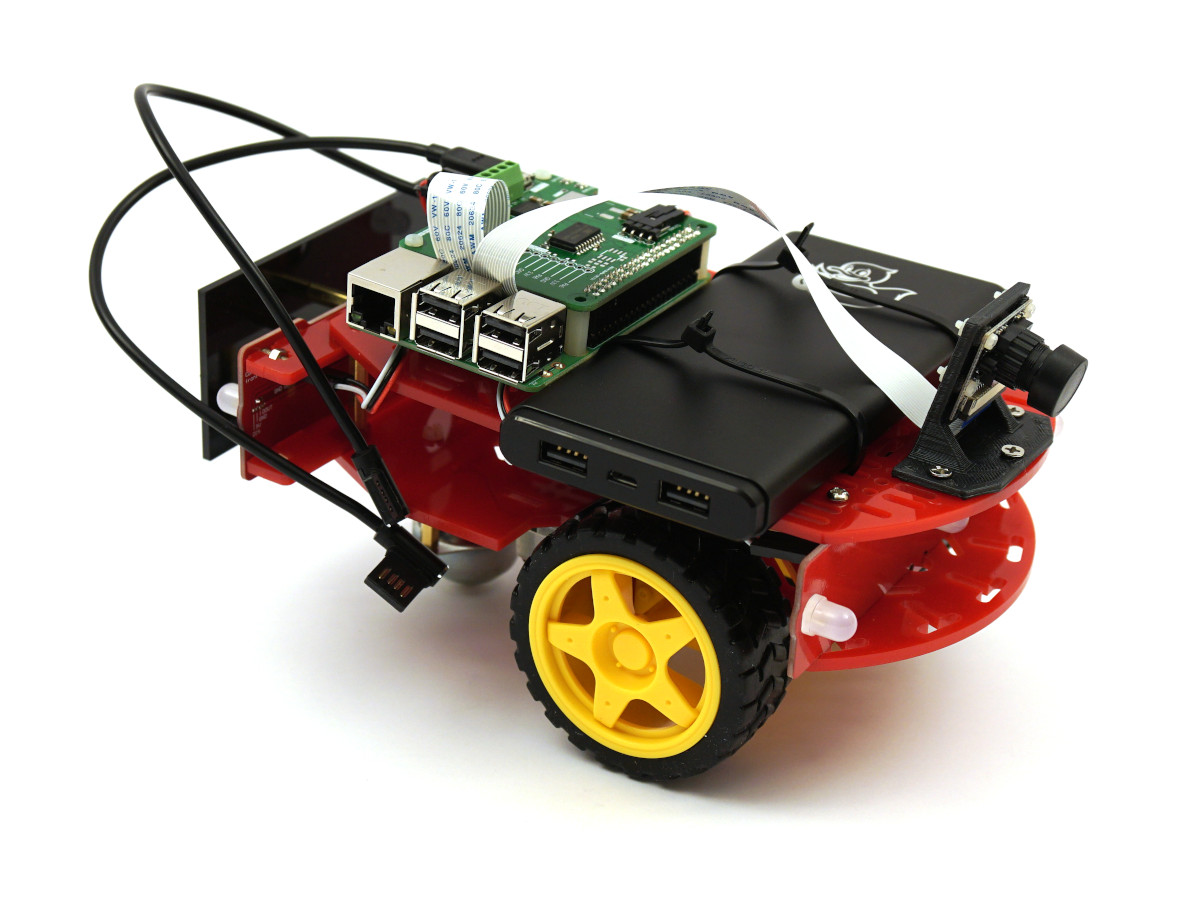
Duckietown Duckiebot ready to run side view
Zusammenfassung
Der Zusammenbau des Duckiebots hat sehr gut geklappt und alle Teile die benötigt wurden waren dabei. Auch der kleine Schraubenziehe hat sich bewährt. Die Anleitung ist soweit okay auch wenn nicht ideal. Aber wie bereits geschrieben mag es auch an mir gelegen haben. Mit der Modifikation den Raspberry Pi oben auf dem Duckiebot zu befestigen erhoffe ich mir besser an die Anschlüsse heran zu kommen. Auch kann ich so die micro SD-Karte einfach ein und wieder ausstecken.
Das folgende Bild zeigt noch die Schilder und Verkehrszeichen die dem Duckiebot beilagen.
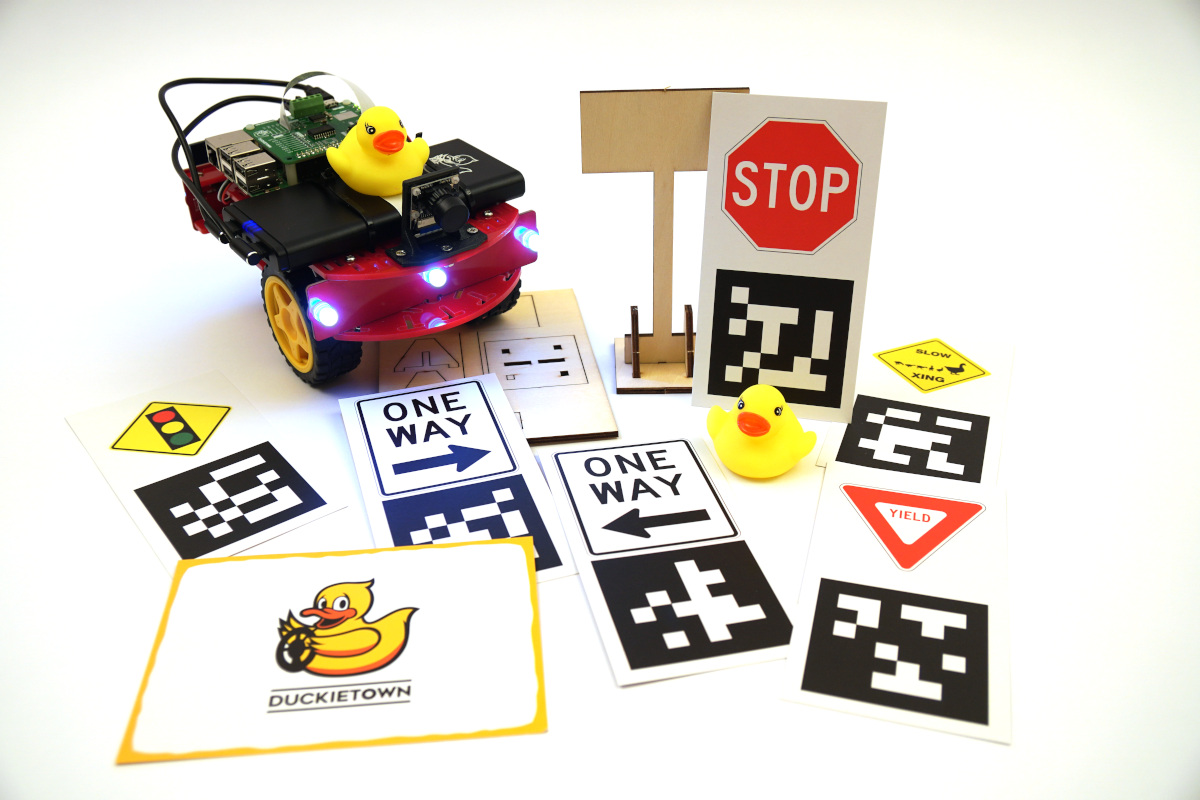
Duckietown Duckiebot ready to run with all components












Recent Comments