


Noch ist beim Jetson Nano die Auswahl an Kameramodellen die am CSI Anschluss des Nano angeschlossen werden können stark eingeschränkt. Denn am Jetson Nano läuft nur die aktuelle Raspberry Pi Kamera V2.1 mit dem Sony Chipsatz „IMX219“. Viele günstige Modelle bzw. die ersten Raspberry Pi Kamera mit dem OV5647 Chip werden nicht vom Betriebssystem aktuell unterstützt. So stellt sich dann schnell die Frage gibt es überhaupt eine Weitwinkelkamera mit dem IMX219 Chipsatz. Ich konnte keine Kamera finden und musste mir so das Kameramodul mit Weitwinkeloptik extra bestellen und eine bereits vorhandene Raspberry Pi Kamera umbauen.
Ich möchte am Nano eine Weitwinkelkamera anschließen da ich den Jetson Nano auf meinem Donkey Car einsetze und so deutlich mehr an Informationen aufnehmen kann was direkt vor dem Auto passiert.
CSI Kamera auf Weitwinkel umbauen
Dafür wird eine normale Raspberry Pi Kamera benötigt. Eigentlich nur die Platine auf der die Kamera befestigt ist. Denn die normale Kamera ohne Weitwinkelobjektiv muss entfernt werden und auf die so frei gewordene Platine das Kameramodul mit der Weitwinkeloptik aufgesetzt werden. Das klappt eigentlich sehr gut, da auf dem neuen Kameramodul auf der Rückseite schon ein entsprechendes Klebepad vorhanden ist.
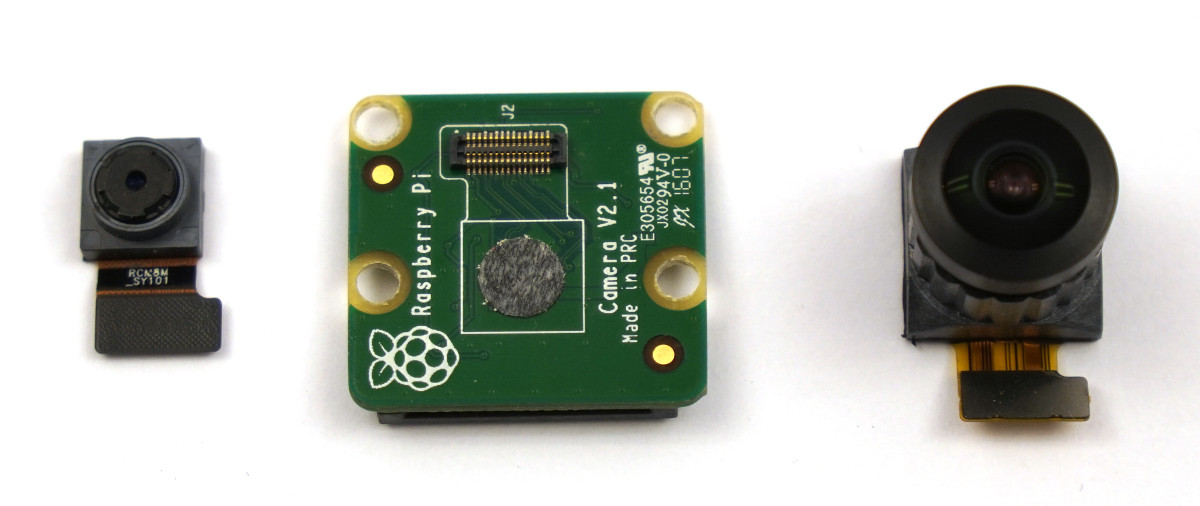
Das folgende Bild zeigt einmal die Platine der Raspberry Pi Kamera Version 2.1 in der Mitte, links daneben die normale Optik und rechts neben dem PCB das Kameramodul mit der Weitwinkeloptik.
Jetson Nano Weitwinkel Kamera
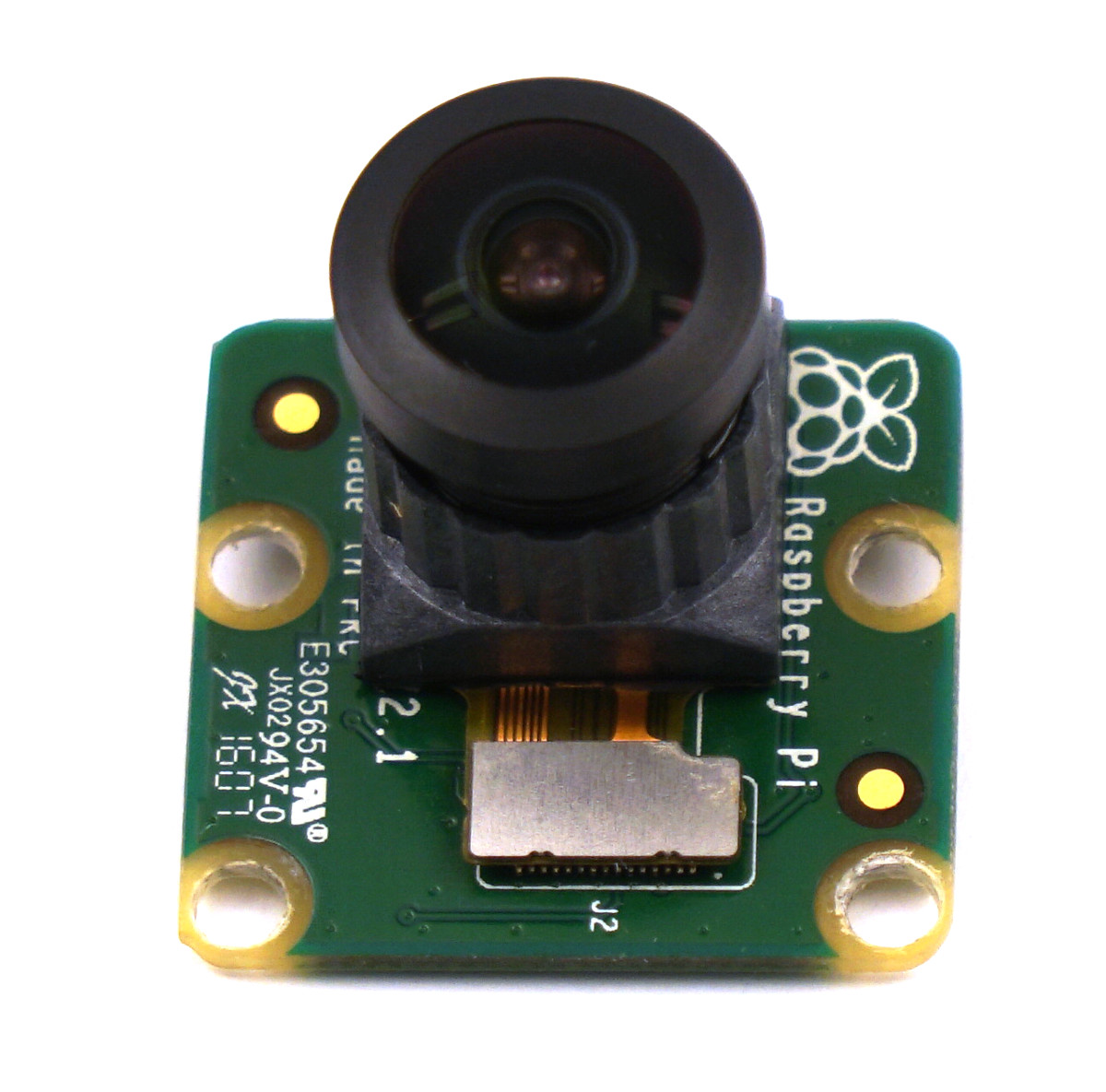
Fertig zusammenbaut sieht anschließend das Raspberry Pi Kameramodul wie nachfolgend gezeigt aus. Meiner Meinung nach könnte das Klebepad auf der Rückseite des Kameramoduls etwas stärker / dicker sein damit es besser an der Platine anhaftet.
Jetson Nano Weitwinkel Kamera montiert
Das nachfolgende Bild zeigt die montierte Kamera auf meinem Donkey Car.

Jetson Nano Weitwinkel Kamera montiert Donkey Car
Wer nicht selber basteln möchte kann auch eine fertige Weitwinkelkamera auf Amazon kaufen. Der Kauflink wie gewohnt nachfolgend zu dem Modell das ich selber auch noch getestet habe.

Kamera in Betrieb nehmen
Nach dem Umbau kommt die spannende Frage ob die Kamera noch funktioniert. Die Kamera wird über ein CSI Kabel mit dem Jetson Nano verbunden. Nach dem die Kamera angeschlossen ist sollte diese mit dem folgenden Befehl als Gerät video0 angezeigt werden. Dazu bitte im Terminal Fenster den nachfolgenden Befehl ausführen.
Befehl: ls /dev/video0
Wenn ein Gerät video0 angezeigt wird dann sollte die Kamera funktionieren.
Kamera testen:
Ob die Kamera auch wirklich funktioniert kann man nur sagen wenn man auch ein Bild sieht. Hier gibt es von der wohl besten Seite im Internet jetsonhacks.com rund um die NVIDIA Jetson Familie ein kleines Programm um den live Video Stream anzeigen zu lassen.
Das Programm nebst Erklärung steht auf GitHub zur Verfügung.
URL: https://github.com/JetsonHacksNano/CSI-Camera
Mit dem folgenden Befehl kann das Repository auf das Jetson Nano Board herunter geladen werden.
Befehl: git clone https://github.com/JetsonHacksNano/CSI-Camera.git
Nach dem das Repository auf den Jetson Nano geklont ist kann es weiter gehen. Im Ordner „CSI-Camera“ der Repositories ist ein kleines Python Programm mit dabei das ein live Bild von der Kamera zeigt. Mit dem folgenden Befehl kann das Programm im Ordner CSI-Camera gestartet werden. Bitte darauf achten, das Du im grafischen Modul also direkt an einem Monitor unter dem Ubuntu Desktop angemeldet bist. Andernfalls z. B. über eine remote SSH Verbindung kann kein Bild angezeigt werden
Befehl: python simple_camera.py
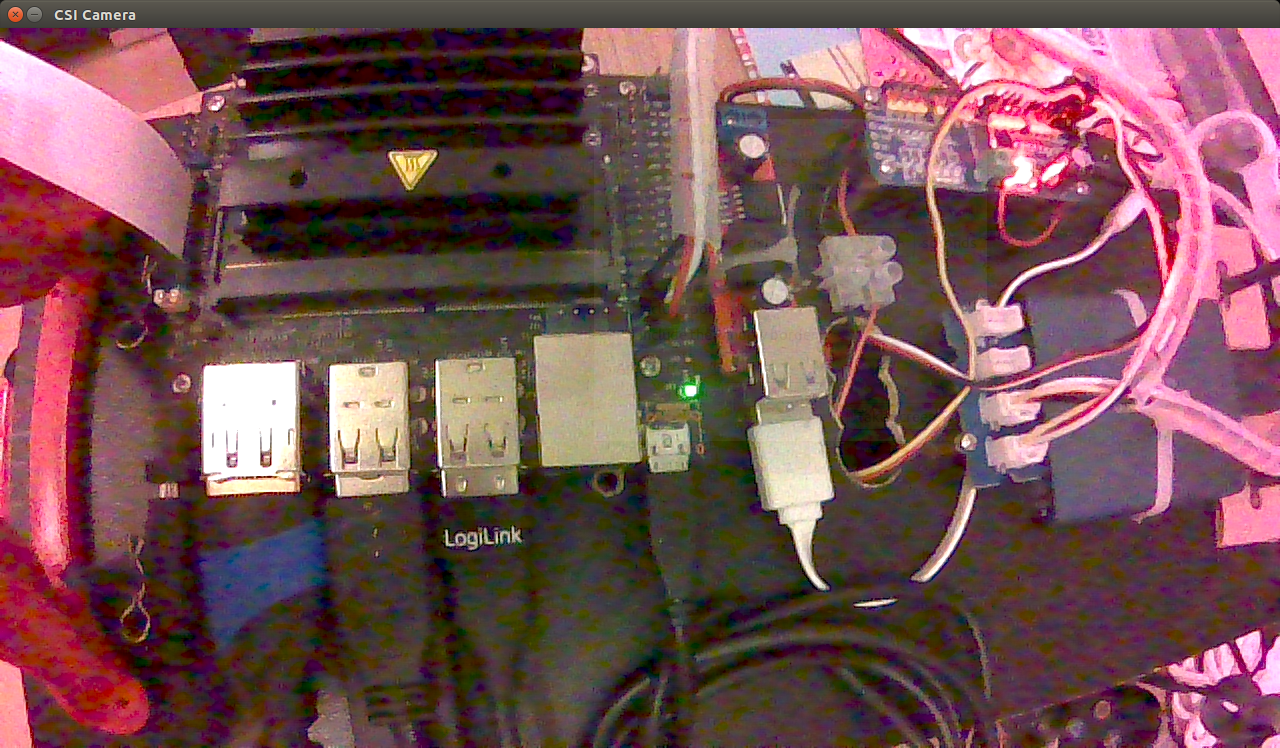
Jetzt sollte ein Bild angezeigt werden. Wenn nicht und der Jetson Nano stürzt ab dann stimmt etwas mit der Stromversorgung nicht. Mehr zum Thema Stromversorgung dann im nachfolgenden Abschnitt.
Das Bild ist etwas verrauscht, da ich im Büro kein besseres Licht zum Zeitpunkt der Aufnahme hatte. Aber generell sieht das Bild sehr gut aus.
Waveshare Jetson Nano camera wide angle 160
Jetson Nano Stromersorgung
Der Jetson Nano ist etwas anspruchsvoller als der Raspberry Pi bei der Stromversorgung. Hier sollte ein starkes Netzteil verwendet werden.
Hinweis – Probleme in der Stromversorgung:
Wenn das Programm simple_camera.py läuft steigt die Leistungsaufnahme des Jetson Nano doch deutlich und mein Standard Handy Ladegerät kommt wohl an seine Grenzen. Das soll heißen, der Nano stürzt einfach ab.
Lösung der Probleme in der Stromversorgung:
Ein Netzteil mit 5V und 5A über den ganz linken Stecker (die Buchse) angeschlossen hat das Problem der Abstürze beim starten des Programmes „simple_camera.py“ behoben. Das Netzteil liefert genug Leistung das der Nano nicht abstürzt sobald etwas mehr Rechenpower von ihm abverlangt wird. Damit die Stromversorgung über die linke Buchse auch klappt muss ein kleiner Jumper hinter dem Anschlussstecker gesetzt werden.
Es funktioniert aber auch ein starkes Handy-Ladegerät mit ca. 3,5 A angeschlossen über die micro USB Schnittstelle.
Zusammenfassung
Die Waveshare Kamera sowie mein Kamera-Umbau funktionieren beide sehr gut am Nano. Für den Stationären Betrieb habe ich jetzt eine stabile Plattform mit der ich arbeiten kann. Auch funktioniert das Training des neuronalen Netzes für das Donkey Car mit dem extra starken 5V / 5A Netzteil ohne Probleme. Neben dem Donkey Car möchte ich auf dem Jetson Nano auch Projekte wie Yolo ausprobieren und mit der Objekterkennung etwas experimentieren.












Recent Comments