


The idea for a surveillance, defence and security robot started with the development of the Raspberry Pi robot I called Big Rob. The idea of the new robot “BRS” (Big Rob Security) is a further development of the Big Rob basis with security add-ons. The BRS robot follows the modular design idea. This enables the bot to be easily and very fast modified for different tasks. This enables the customer to use one robot for different tasks. This modular design is very cost efficient.
The following picture shows the security robot which is a prototype for hardware and software testing.
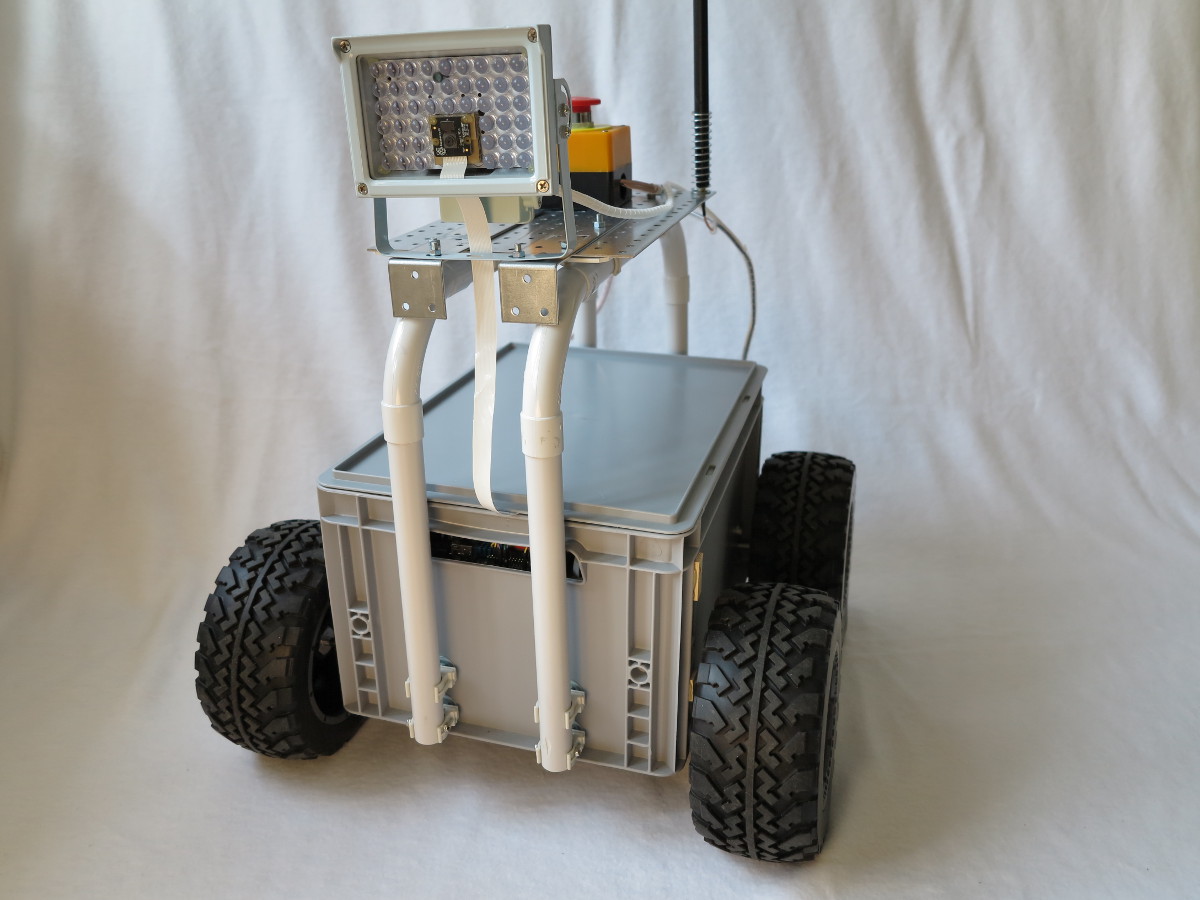
Custom Build Robots – security robot
Security robot Feature list:
The list is an overview of planned features which will be available for the security robot. Not all possible features are listed but the verity should show features and setups which are possible right now.
- Mobile video surveillance, with a wide angle camera for daylight operations and an IR camera for night surveillance.
- Network connectivity
- Remote video surveillance web interface. This interface runs easily on tablet, PC or smartphone and follows HTML and responsive design patterns.
- Continuous video recording by built-in video recorder.
- Moving between observation positions following for example a path without operator guidance via differential GPS.
- Automatic driving around obstacles and returning to recharge batteries.
- Time of autonomous patrolling – 6 hours; operating range – up to 8km.
- Maintenance cost are as low as for a robot lawn mowing system.
- All-season and day-and-night operation.
- Low noise electric motor drive for a stealth mode operation.
Video surveillance:
With the security robot it is very easy to setup a mobile and very flexible video surveillance system. On the way too or after reaching the observation position the BRS is immediately able to control the area.
During day operation the robot is equipped with different wide angle camera systems to enable a full 360° view around the robot. These cameras are optimized for daylight. To be flexible the robot is additional equipped with an IR camera system and IR flood light system. This enables the robot to monitor a specified area at night or to control a building. This enables the operator to get an overview of all activities in the monitoring area of the robot during day and night operations.

Custom Build Robots – security robot video surveillance
Network connectivity:
No need for a special network setup. The robot easily integrates into your local WIFI system. With additional modules the security robot could use the nationwide wireless network. Equipped with these network modules like a 5G wireless communication module the connectivity of the robot is ideal for urban areas. For operations in the field the robot could additional equipped with different XBee modules.
As a default setup the robot is equipped with different WIFI modules to ensure a secure and fast wireless connection.
Remote robot controlling:
With the build in web interface it is very convenient to control the robot. All available surveillance modes are available via the web interface. The operator could easily select a mode and start the observation. The touch interface makes it very easy to control the functions of the robot as well remote control the security bot. A tablet or smartphone is enough to manual control the robot.
The robot streams the live video directly to the operator or informs the operator via an alert message if someone is entering the monitored area.
The interface uses HTML 5 to ensure compatibility with the latest web browsers and mobile devices.
Continuous video recording:
The robot is equipped with a low power storage smart drive to directly save the recorded video files. The operator could configure how long the files should be stored. It is possible to automatically delete the files after a defined period of time automatically or manual by the operator. All the files could be easily downloaded via the WIFI network or LAN connection to a PC or additional storage system.
Moving between observation positions:
It is very easy to define observation positions and upload them into the robot. The software inside the robot is able to read different GPS-coordinate flies like KMZ or KML files. After uploading the files into the system the robot is able to load the waypoint and start the observation. The robot follows the given path to reach the observation position, starts the observation and could then drive to the next position.

RasPiGNSS theoretical setup
Automatic driving:
During the way from one observation point to another the robot has automatically drive around obstacles. With the self-driving mode the robot is able to scan the surrounding with a different set of sensors to drive safe. The operator only has to plan the path and observation point and the robot will drive automatically until he reached the planned position.
Operation time:
The robot is able to operate for hours autonomously or manual controlled. Depending on the build in power pack, terrain and driving distance the robot could operate for 6 hours or up to 30 hours in observation mode.

Peak Power Pack Lithium Ionen Li FePO4 Zellen 6 small
Cost effective maintenance:
Modern lithium-ionen LiFe04 cells are very save and have a very high energy density. With up to 3000 charging cycles the batteries could be used for a long time without replacing them. The Lithium Ionen technology is maintenance-free and with the built in battery charging and battery management system the robot is easily to maintain.
All-season:
The robot is designed to work all-season from winter to summer. During the winter time the robot could activate a build in heater to protect the battery pack from freezing. During hot summer days the robot could activate a cooling system to cool down the logic unit and electronic components.

Custom-Build-Robots-Big-Rob15
Stealth mode:
The DC motors used for the robot are very strong and very quiet. This enables the robot to operate very silent. This is important during critical transfer missions from one observation point to another one. If the robot has reached the position and the DC motors are shut off the robot is inaudibly for a human. With the active IR light a human is even not able to spot the robot.
The next pictures shows the robot in our garden waiting for the night.

Custom Build Robots – security robot outdoor test
The video shows the robot driving around in the yard at night.











Recent Comments