

In November 2016, Adam Conway and Will Roscoe launched the Donkey Car project. The idea that drove both was to give interested hobbyists a possibility to enter the world of self-driving cars in model format. The most important reasons for me to use the Donkey Car framework are the large international community, the free availability of the software, the Donkey Car Simulator and the fact that standard modeling technology is used to build the physical robot car. The use of classic model cars reduces the costs significantly.
Originally, the Donkey Car framework was developed for the Raspberry Pi, which is the best-selling single board computer and with its huge community helped lay the foundation for the success of the Donkey Cars project. With the availability of the NVIDIA Jetson Nano 2019 which has a powerful GPU architecture and its similar ARM processing unit as used by the Raspberry Pi, the Donkey Car community immediately recognized the benefits and additionally extended the framework with support for the Jetson Nano. One of the biggest advantages of the Jetson Nano compared to the Raspberry Pi is that neural network training is possible directly on the Jetson Nano thanks to its GPU architecture. With the built-in GPU units, the Jetson Nano can perform parallel calculations that allow it to train neural networks in a high-performance manner. The Raspberry Pi 4 with 4 GB RAM but without GPU support has no chance against the Jetson Nano when it comes to executing and training neural networks. The Donkey Car Framework written in Python and its good inline documentation additionally facilitate the introduction to the project of autonomously driving robot cars and to the topic of artificial intelligence. At this point, the simulator for the Donkey Car should also be mentioned. This allows you to get started with the Donkey Car project in a very easy and really inexpensive way. This is possible because you can easily install the Donkey Car Simulator on existing hardware such as a laptop or PC.
My conclusion in sum is that the Donkey Car Framework in its combination of simulator solution and physical model car is very practice-oriented, easy to understand and therefore ideal for the entry into the topic of artificial intelligence.
No gray theory but a practical step by step introduction to:
- Artificial Intelligence and Deep Learning
- Generating synthetic data in the simulator
- Training of an autopilot / neural network
- Testing the autopilot in the simulator
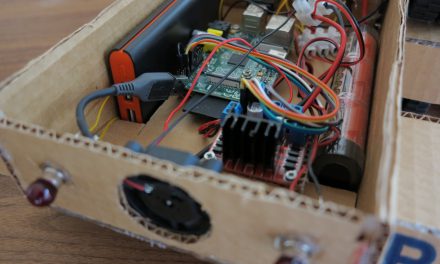
- Step by step instructions for building a real model robot car
E-Book – Download:
English: Donkey Car E-Book english v. 8 Ingmar Stapel
Deutsch: Donkey Car E-Book Deutsch v. 8 Ingmar Stapel
Installation guide – Windows

Installation guide – Ubuntu
Donkey Car – Simulator












trying to run the simulator I followed the steps in your ebook and received the following error
using donkey v4.2.1 …
loading config file: C:\Users\jim.walker\donkeycar_sim\gym-donkeycar\mysim\config.py
loading personal config over-rides from myconfig.py
INFO:root:PID: 12324
INFO:root:cfg.CAMERA_TYPE PICAM
cfg.CAMERA_TYPE PICAM
Traceback (most recent call last):
File “manage.py”, line 719, in
meta=args[‘–meta’])
File “manage.py”, line 140, in drive
cam = PiCamera(image_w=cfg.IMAGE_W, image_h=cfg.IMAGE_H, image_d=cfg.IMAGE_DEPTH, framerate=cfg.CAMERA_FRAMERATE, vflip=cfg.CAMERA_VFLIP, hflip=cfg.CAMERA_HFLIP)
File “c:\users\jim.walker\donkeycar_sim\donkeycar\donkeycar\parts\camera.py”, line 15, in __init__
from picamera.array import PiRGBArray
ModuleNotFoundError: No module named ‘picamera’
There must be a step missing in your explanation – why is a virtual car complaining that it does not contain a physical device? Makes no sense.