


Heute habe ich damit angefangen einen Raspberry Pi betriebenen Sicherheitsroboter zu bauen mit dem Raspberry Pi Sense-HAT. Das Raspberry Pi Sense-HAT ist ideal für kleine Do-it-Yourself Roboter Projekte. Das Sense-HAT ist mit einer LED Matrix ausgestattet und einem kleinen Joystick. Mit weiteren 6 Sensoren auf dem Sense-HAT kann so gut wie alles gemessen werden was benötigt wird um einen Roboter zu kontrollieren.
- Gyroscope – Winkelgeschwindigkeitssensor
- Accelerometer – Linearbeschleunigungssensor
- Magnetometer – Magnetsensor
- Luftdruck: 260 – 1260 hPa absoluter Bereich
- Temperaturfühler
- Relative Luftfeuchtigkeit Sensor
- 8×8 LED-Matrix-Display
- kleiner 5-Tasten Joystick
Nach dem ich ein paar Minuten mit dem Raspberry Pi Sense-HAT gespielt hatte und dieses auf meinen Raspberry Pi Computer aufgesteckt war bekam ich das erste große Problem. Alle GPIO Pins des Raspberry Pi’s waren durch das Sense-HAT abgedeckt. Aber ich benötige mindestens 6 GPIO Pins um den Motor Treiber anzuschließen. Vielleicht kann ich ein paar weitere Pins auf das Sense-HAT löten. Aber ich bin mir nicht sicher ob das die beste Lösung ist.
Wie Du im folgenden Bild siehst sind alle GPIO Pins blockiert durch das Sense-HAT. Ich dachte ich könnte vielleicht Female to Female Kabel in das Sense-HAT stecken aber das ist nicht möglich.
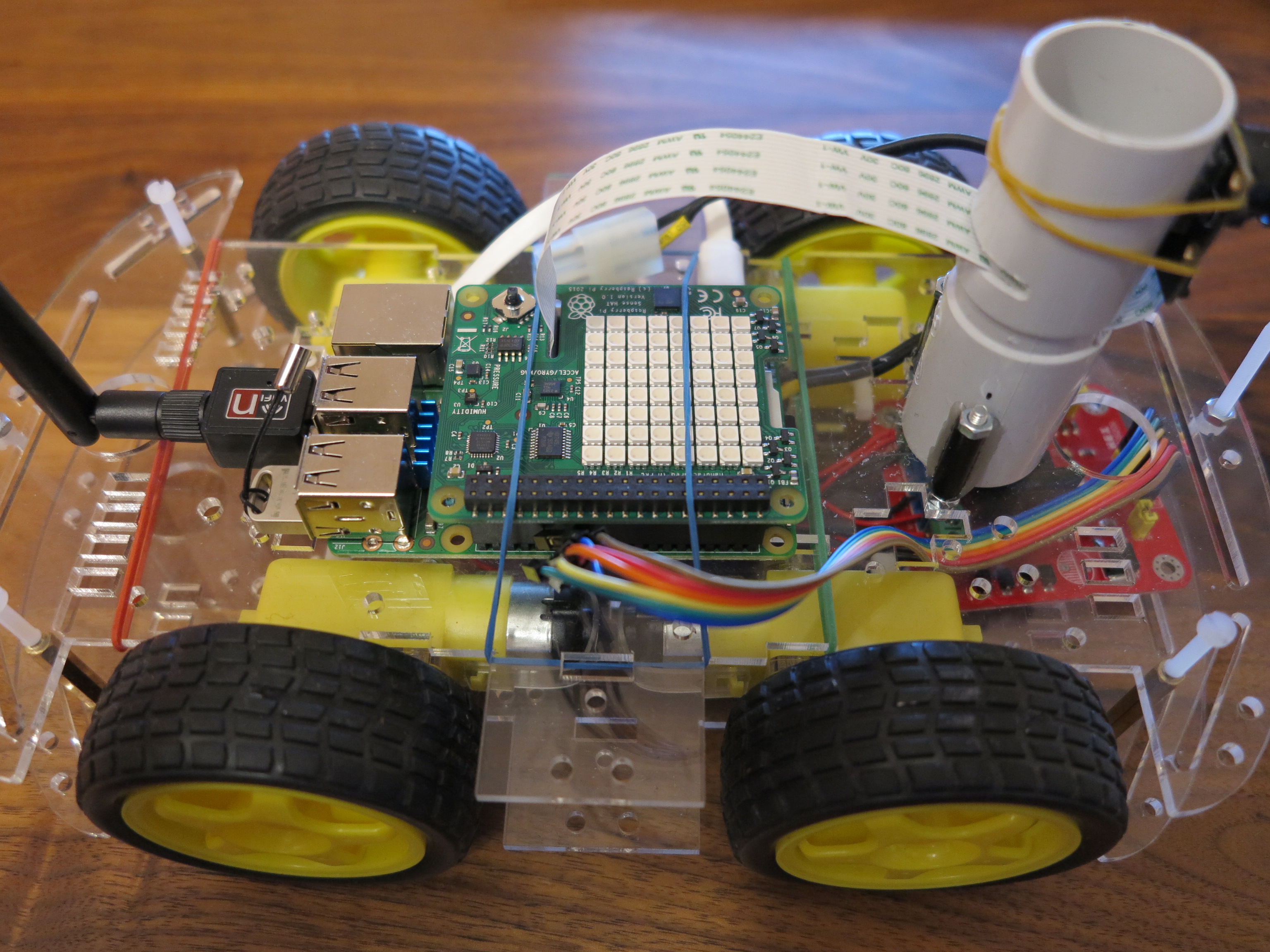
Raspberry Pi Roboter mit Sense-HAT
Das nächste Bild zeigt das Sense-HAT mit geöffneter GPIO Leiste.
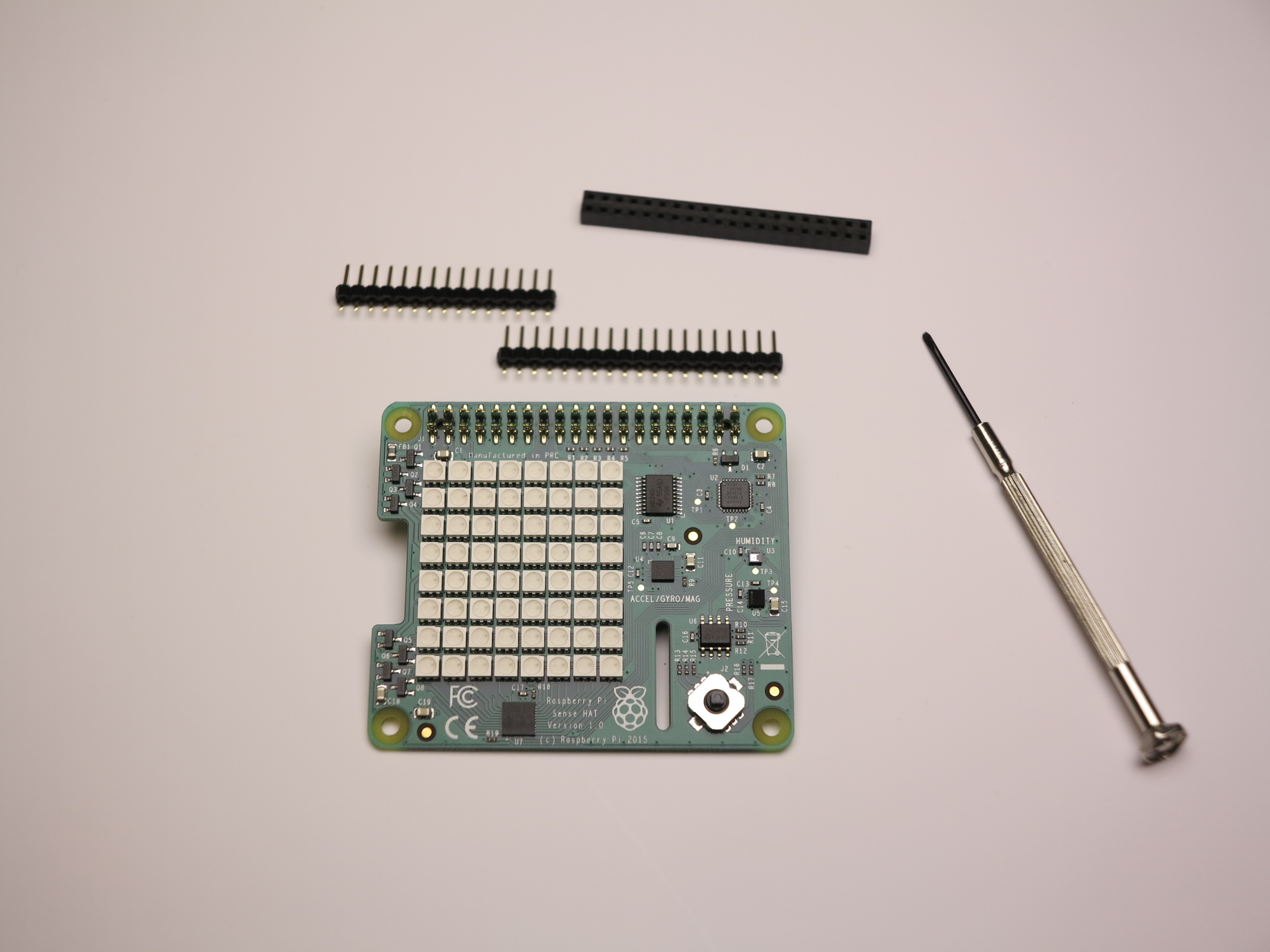
Raspberry Pi Sense-HAT mit offener GPIO Leiste
Die Lösung – Female to Male jumper Kabel
Gut, die Lösung die ich gefunden habe sind Female to Male Jumper Kabel. Mit solchen Kabeln habe ich das Sense-HAT an meinen Raspberry Pi 2 Model B angeschlossen wie Du auf dem folgenden Bild siehst. Ich habe den Aufbau noch zu optimieren aber soweit funktioniert es.
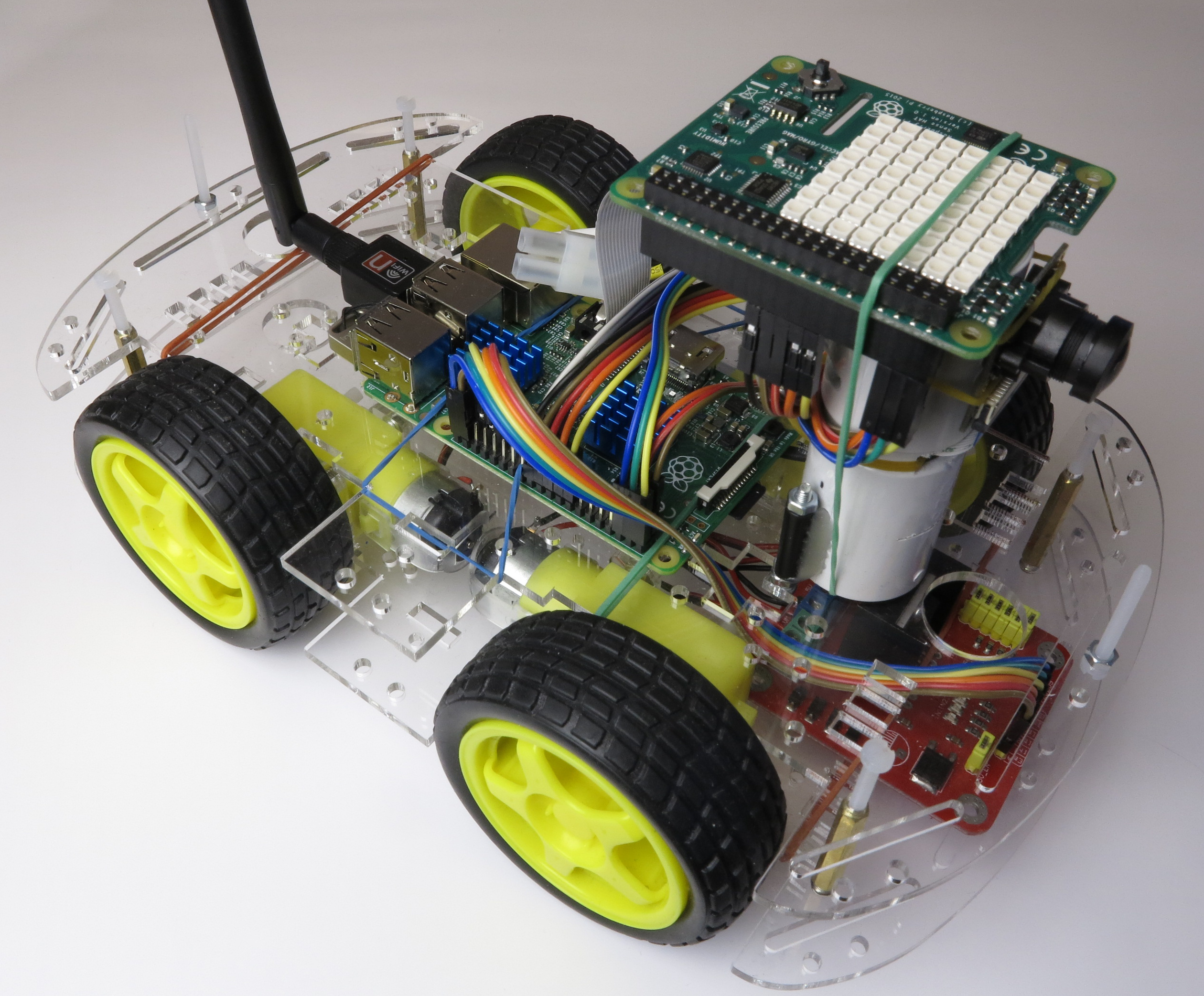
Raspberry Pi robot Sense-HAT connected
[DE_BOOK_DETAIL DE_BOOK_DETAIL=“DE_BOOK_DETAIL“]
Schema-Zeichnung Sense-HAT und Verkabelung
Die Schema Zeichnung des Sense-HAT gibt es unter der folgeden URL als PDF Sense-HAT-V1_0.pdf von der Raspberry Pi Foundation.
Das folgende Bild zeigt einen kleinen Ausschnitt von der Zeichnung. Es zeigt welche GPIO Pins benötigt werden um das Sense HAT mit den Kabeln an den Raspberry Pi anzuschließen.

Sense HAT from www.raspberrypi.org
Wie Du im Bild sehen kannst werden die folgenden GPIO Pins benötigt:
2, 3, 10, 9, 11, ID_SD, 23, 24, 25, 8, ID_SC und die zwei Pins 2, 4 als +5V. Vergesse nicht mindestens eine Erdung (GND) zu setzen.
Ich hatte etwas mit den Verbindungen hin und her zu spielen aber am Ende hat alles super funktioniert
Zusammenfassung Sense-HAT
Ein Raspberry Pi mit einem angeschlossenen Sense-HAT kann alles machen von der Aufzeichnung der Bewegung des Roboters bis hin zum aufzeichnen des Luftdrucks und der Temperatur. Aber mit der CPU des RaPi direkt unter dem Sense hat wird die Temperatur nicht richtig sein. Ich muss das noch in der Zukunft aufprobieren.
Der Roboter wird mit dem Beschleunigungssensor und Gyroskop Kräfte und Bewegungen aufzeichnen. Weitere Informationen über das Raspberry Pi Sense HAT sind auf der Raspberry Pi Homepage verfügbar Sense Hat












Recent Comments