

Ich habe mich für den Ultraschall Sensor SRF08 entschieden, da diese über einen I²C Bus verfügt und somit komfortabel an einen Raspberry Pi Computer angeschlossen werden kann. Ich hatte schon einmal zu viele HC-SR04 Ultraschall Sensoren in meinem Roboter Auto verbaut und bekam Probleme mit all den Kabeln. Die HC-SR04 Sensoren haben fehlerhafte Messergebnisse geliefert, bedingt durch die 60 Jumper-Kabel mit denen ich alles verbunden hatte. Schuld an den Fehlmessungen war wohl das durch die vielen Kabel generierten Magnetfeld. Mit der Verwendung eines Bus wie dem I²C Bus für die Kommunikation zwischen den Sensoren und dem Raspberry Pi sind diese Art von Probleme mit einem störenden Magnetfeld gelöst. Ich hatte nach dem Umbau des Roboters auf die SRF08 Ultraschall Sensoren keine Probleme mehr.
Die Sensoren sind den Preis von 39,-€ wert. Dafür erhält man nicht nur einen Ultraschall Sensoren. In der Mitte zwischen Sender und Empfänger ist ein analoger Helligkeitssensor verbaut. Ich kann diesen SRF08 Snsor für Dein Roboter Projekt nur empfehlen. Mit diesem Sensor können Entfernung von 3cm bis 6m gemessen werden. Das ist völlig ausreichend für mein Roboter Projekt.

SRF08 Ultrasonic Distance Sensor
Der Ultraschall Sensor wird wie auf dem folgenden Bild zu sehen ist an den I²C Bus angeschlossen. Achte bitte darauf einen I²C Pegelwander (Level-Shifter) zu verwenden wenn der Sensor an den Raspberry Pi angeschlossen wird. Der Sensor arbeitet mit 5V und der Raspberry Pi arbeitet nur mit 3,3V.
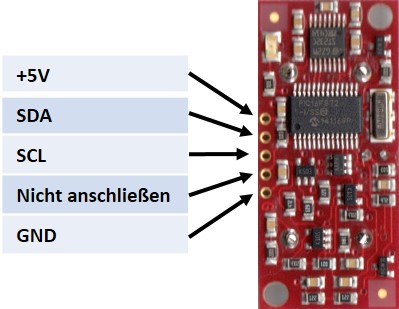
SRF08 Ultrasonic Distance Sensor I2C data bus
Das nächste Bild zeigt mein Test-Setup mit einem Raspberry Pi, einem I²C Pegelumsetzer in der Mitte und dem SRF08 Sensor auf der rechten Seite vom Bild.
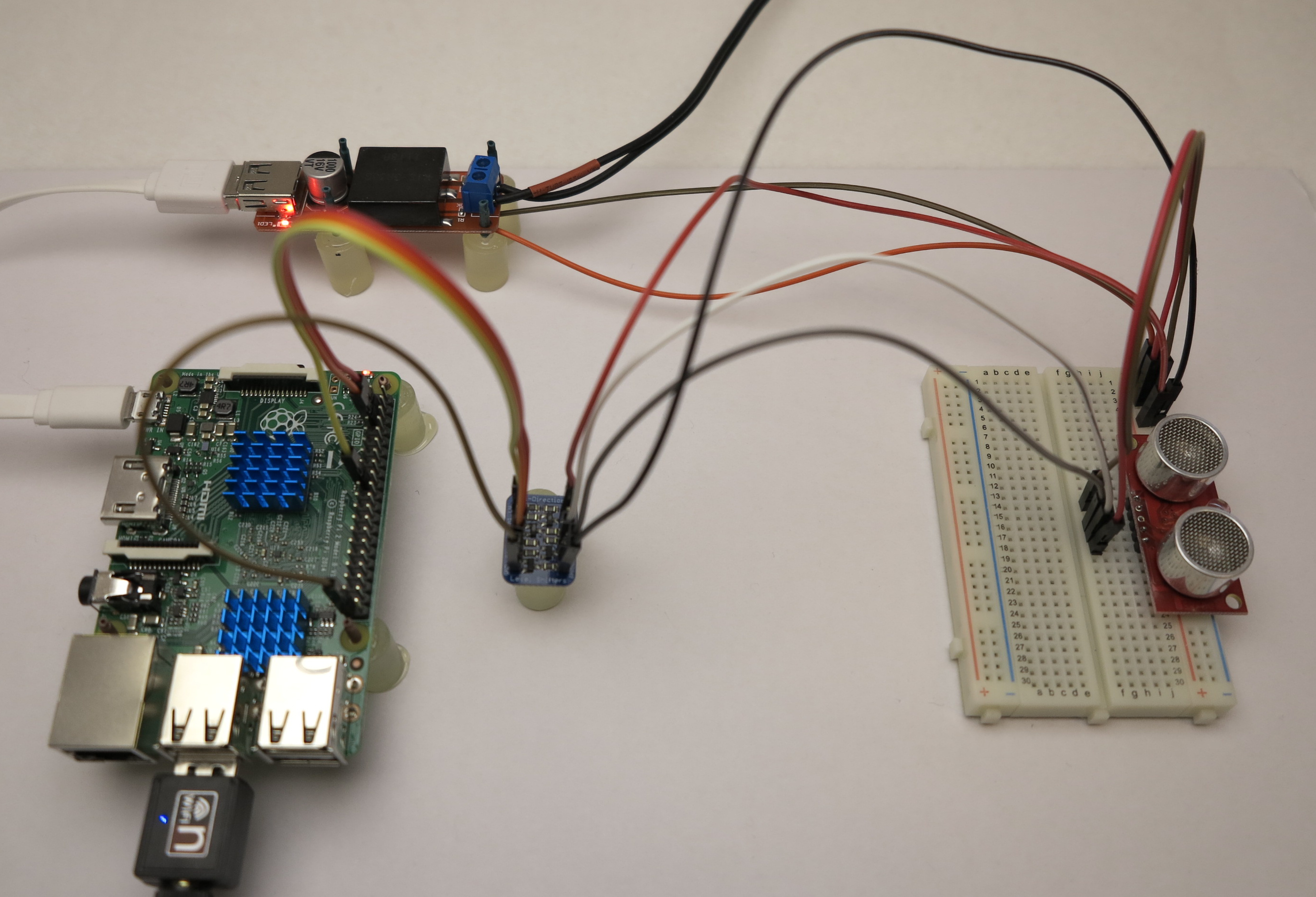
SRF08 Ultrasonic Distance Sensor I2C test setup
Ultraschall Sensor SRF08 – Ändern der I2C Adresse
Es war gar nicht so leicht die I²C Adresse des SRF08 Sensors zu ändern. I habe mir dazu ein kleine Python Programm geschrieben. Mit diesem ist es möglich die Adresse zu ändern. Es ist wichtig die Adresse des Sensors zu ändern wenn mehr als zwei an den I²C Bus angeschlossen werden. Die Default Adresse des Sensors ist 0xE0. Das entwickelte Programm hilft Dir mit einem sehr einfachen Menü bei der Adressänderung.
Bitte sei vorsichtig bei der Verwendung des Programmes. Ich habe versucht es sehr sicher zu programmieren aber verwende es dennoch auf eigene Gefahr.
Das Bild zeigt das Menü des kleinen Programmes mit einem angeschlossenen Ultraschall Sensor.
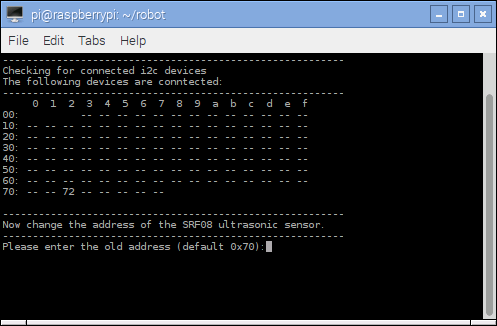
SRF08 Ultrasonic Distance Sensor I2C – address change
Das Python Programm steht hier zum Download bereit: SRF08 ultrasonic sensor – program to change the I2C address
[DE_BOOK_DETAIL DE_BOOK_DETAIL=“DE_BOOK_DETAIL“]
Spezifikation:
- Voltage – 5v only required
- Current – 15mA Typical. 3mA Standby.
- Frequency – 40KHz
- Range – 3cm -6m (1.2-2.4in).
- Max Analogue Gain – Variable 94 to 1025 in 32 steps.
- Connection – Standard I2C Bus.
- Light Sensor – Front Facing light sensor.
- Timing – Fully timed echo, freeing host controller of task.
- Echo – Multiple echo – keeps looking after first echo.
- Units – Range reported in uS, mm or inches.
- Small Size – 43mm x 20mm x 17mm (1.7×0.8×0.7 in) height.
Mehr technische Details gibt es hier: http://www.robot-electronics.co.uk












Recent Comments