


Today (2016-06-30) I got my ZeroBorg from www.PiBorg.org. The motor controller is very small, fits on top of my Raspberry Pi ZERO and is perfect for my robot idea I have in mind with mecanum wheels.
The ZeroBorg can control up to 4 motors independently. This enables a robot to drive with Mecanum in any direction you want to drive. I already bought four Mecanum wheels and now I have to build my own robot with the ZeroBorg motor driver. The idea is to build a robot to generate a 3D model of my apartment via simultaneous localisation and mapping S.L.A.M. The robot should be perfect for this project because it can go forward, backward, steer like a tan and strafe like a crab. This will be very cool but a lot of work in programming U guess…
The picture below shows the ZeroBorg motor controller for the Raspberry Pi ZERO. I got the motor driver because I supported the KickStarter campaign from www.PiBorg.org.

ZeroBorg motor controller – robot-car
Its small size means it fits neatly below a Raspberry Pi Zero. I got the latest Raspberry Pi Zero with the CSI plug for a Raspberry Pi camera. The ZERO together with the ZeroBorg motor controller opens up endless possibilities for tiny desk robots, boats….
The next picture shows the unpacked ZERO Borg motor controller as it was delivered. Some additional mounts where included in the package.
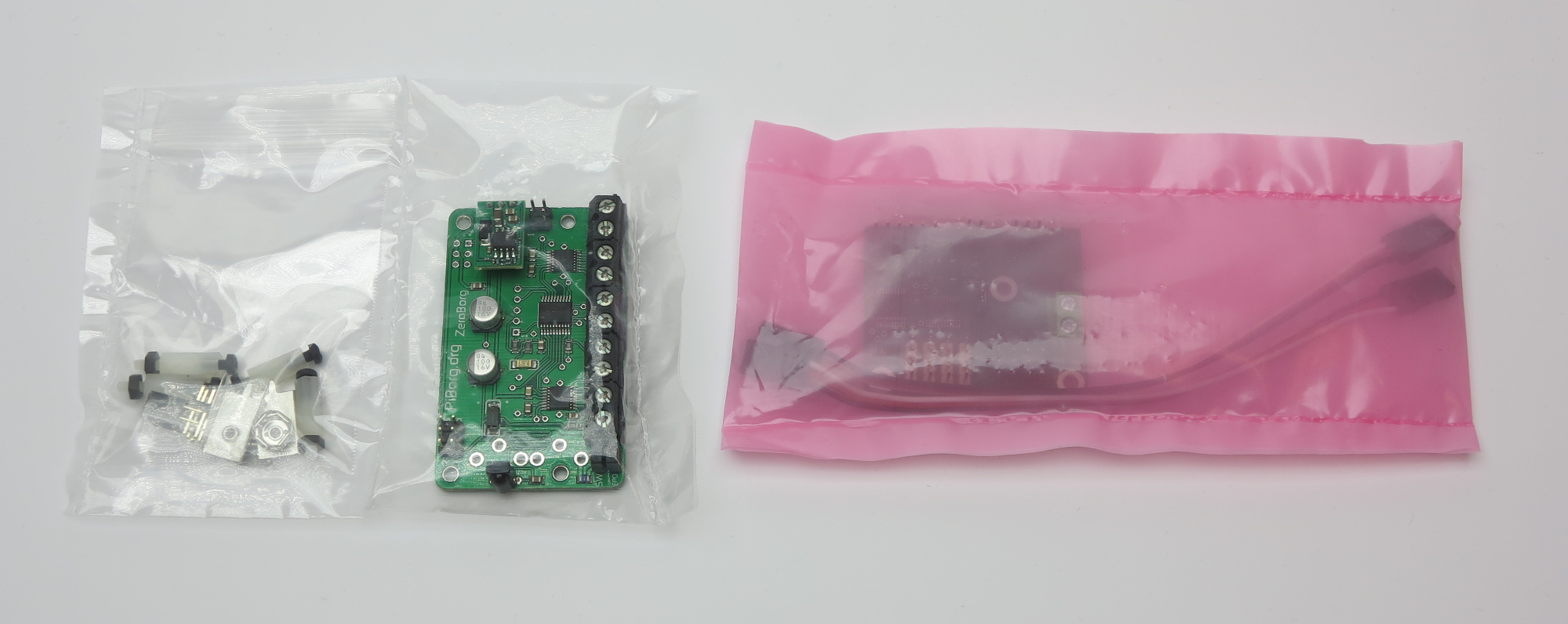
ZeroBorg motor controller – package
I supported the KickStarter campaign and you will find the campaign homepage on KickStarter with the following url: ZeroBorg – Robotics for the Raspberry Pi Zero
Unpacked the board itself and all the other stuff looks very well soldered and nice. As well all cables are included in the package. Hopefully I will have the time in the next months to start with my project.
This picture shows all parts of the package I got from the KickStarter campaign.

ZeroBorg motor controller – unpacking
This are the components I will use together with the ZeroBorg motor controller to build my idea of a camera robot-car. The mecanum wheels are perfect for my project. I already build the chassis / robot out of a floppy disc box. Now I have to integrate all the electronic components.

ZeroBorg motor controller – robot-car components
This is a picture how the robot looks with the mounted wheels but with a simple L298 N H-Bridge motor controller which is able to control two dc motors and not four independently.












Recent Comments