
Today I optimized my function to detect lane lines in a video. The video I used to test the latest version of my algorithm was recorded 2009 during a road trip together with FGordon. The video is very difficult for my setup because the quality is low and the lane lines are bleached frome time to time.
I tried to optimize the seetings to detect the lane lines throughout almost all of the video. Okay sometimes the logic will draw some strange and not accurately annotated lines… For the first tests it looks good but not perfect as shown in the videos from udacity self-driving nanodegree program. To steer a car with my algorithm… no chance!
But check out the latest result of my video with the seetings shown in the video:

The picture below shows the mask I used to detect the lane lines. All lane lines which are corvered by the red mask should be detected. This works very well but it is not dynamic.
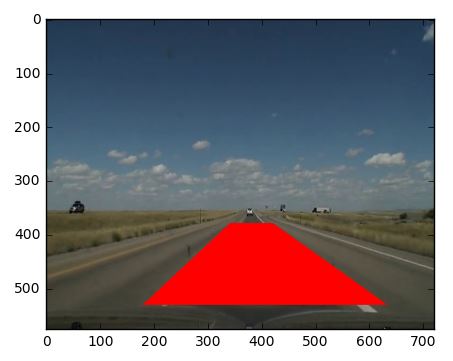
lane line mask
The next picture shows the picture after detecting the lane lines.
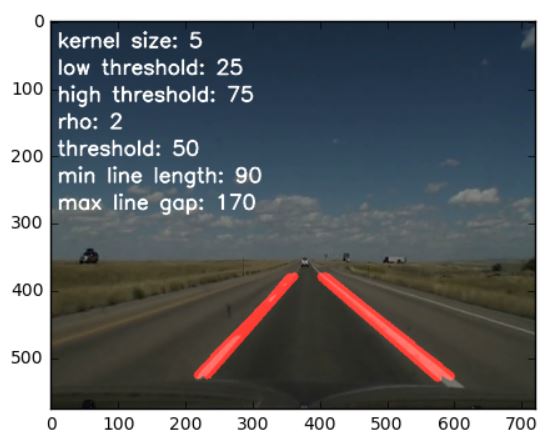
lane line drawn
The next video shows the latest version of my algorithm in action.












Recent Comments