


Warum ich einen Servo Motor mit dem Raspberry Pi ansteuern möchte erkläre ich nachfolgend. Ich möchte auf der Vorderseite und Rückseite meines Roboter Autos jeweils einen Ultraschall Sensor installieren. Mein Problem ist, dass die Sensoren einen Öffnungswinkel von 15 Grad haben. Um einen besseren Überblick zu erhalten was vor oder hinter dem Roboter-Auto los ist möchte ich die Ultraschallsensoren etwas nach links und rechts drehen. Die Idee ist die Ultraschallsensoren um ca. 35 Grad nach links und rechts drehen zu können. Damit ich die Sensoren drehen kann benötige ich jeweils einen Servomotor wie diese auch im Modellbau verwendet werden. Entschieden habe ich mich für kleine 9g micro Servomotoren. Diese sind kostengünstig und passen gut in mein Raspberry Pi Roboter.
Das Bild zeigt mein Roboter-Auto von vorne mit einem Servomotor und daran befestigten Ultraschallsensor.
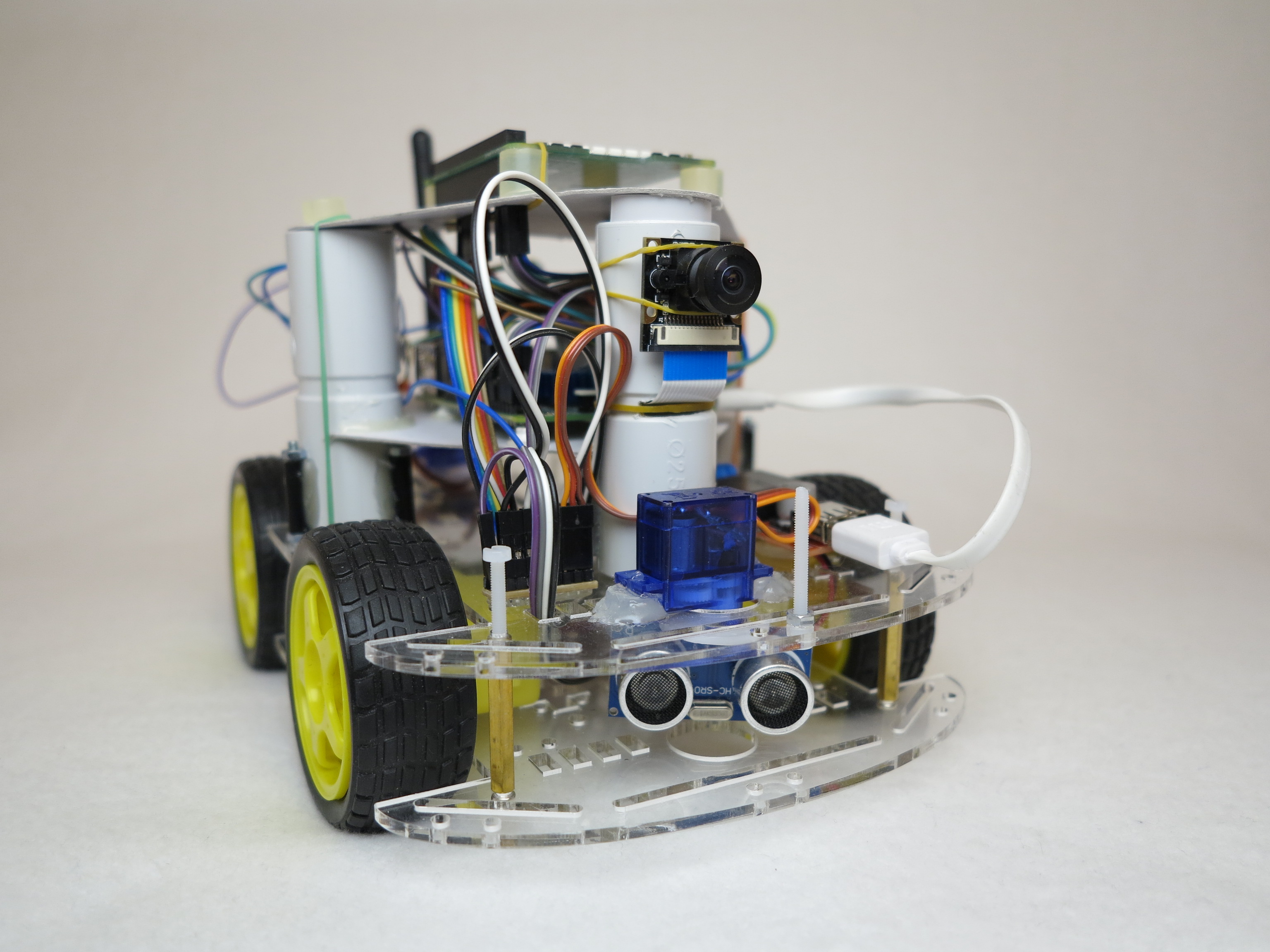
Servomotor – Raspberry Pi Roboter-Auto
Komponenten Liste
Die Komponenten die ich in diesem Artikel verwendet habe um die Servomotoren mit einem Raspberry Pi verbinden zu können sind die folgenden:
Die Step-Down Konverter habe ich verwendet um einmal den Raspberry Pi mit +5V zu versorgen sowie um die Servomotoren ebenfalls mit +5V versorgen zu können. Leider ist es nicht möglich die Servomotoren direkt an den Raspberry Pi anzuschließen. Hier liefert der Raspberry Pi nicht genügend Strom und würde sicher schaden nehmen.
Die Komponenten die für den Bau des Roboter-Autos benötigt werden finden sich als Übersicht unter dem folgenden Link: Raspberry Pi Roboter-Auto Komponentenübersicht
Einfürhung Servomotoren
Es gibt eine Vielzahl von Servomotoren für unterschiedliche Anwendungsfälle. Aber allen gemeinsam ist, dass sie über drei Kabel für den Anschluss verfügen. Eines für die +5V, eines für die Erdung GND und eines für das PWM Signal. Abhängig von dem PWM Signal bewegt sich der Servo von einer Position auf die andere Position. Es ist sehr einfach einen Servo mit dem Raspberry Pi zu steuern. Du musst dazu den Servo lediglich an eine externe Stromquelle anschließen (+5V / GND) und normaler weise das gelbe Kabel des Servomotors muss mit dem GPIO Pin des Raspberry Pi verbunden werden der aks OUT / PWM konfiguriert ist. Bitte prüfe die Herstellerangaben des Servomotors welches Kabel für was ist. Weiter muss die externe Stromquelle und der Raspberry Pi eine gemeinsame Erdung haben. Andernfalls wird sich der Servomotor vermutlich nicht richtig bewegen.
Das folgende Bild zeigt zwei unterschiedliche Servomotoren. Beide können mit dem Raspberry Pi an den PWM out Pin angeschlossen werden. Die Stromversorgung des Servomotors muss über eine externe Stromquelle sichergestellt werden.
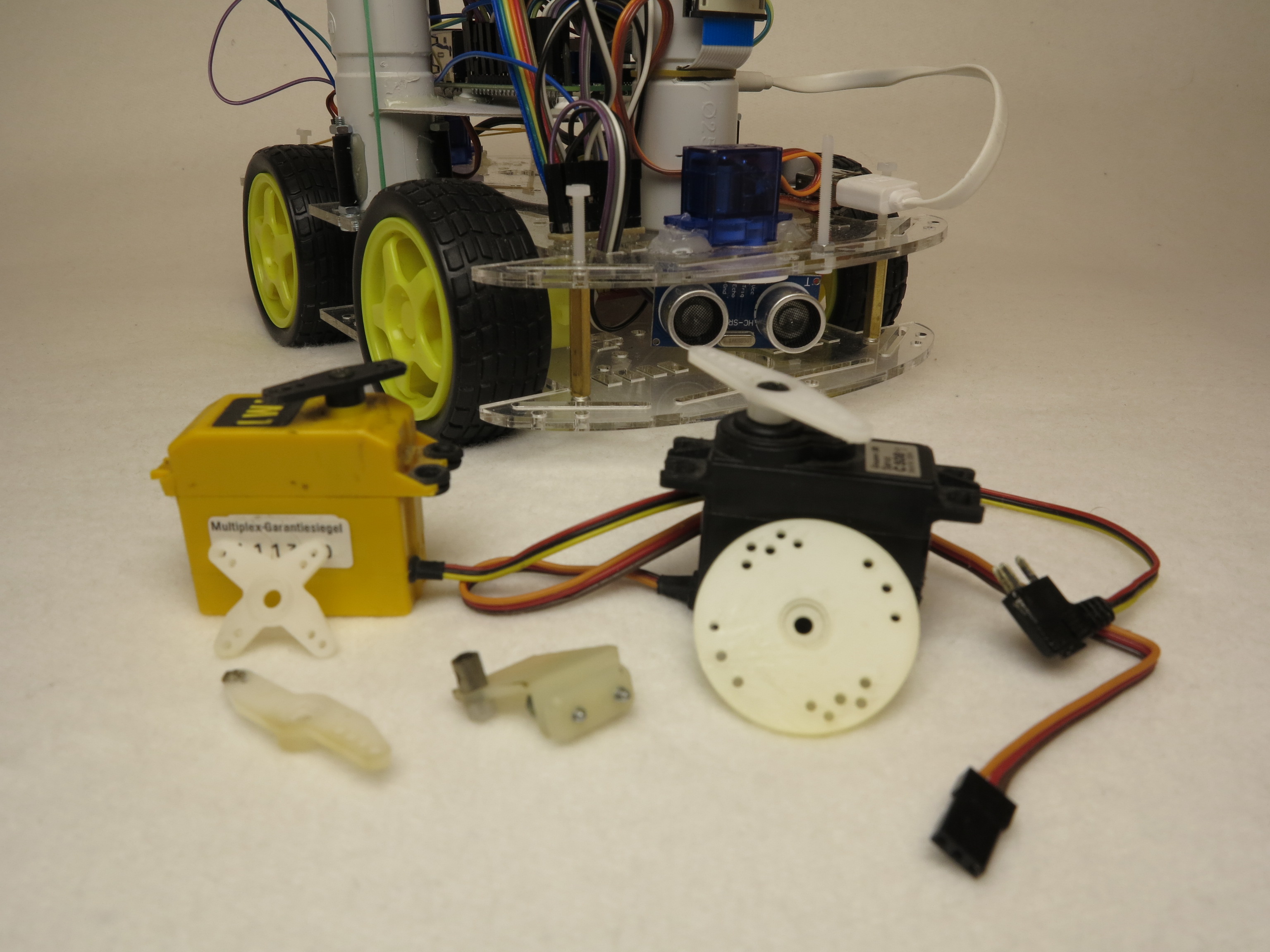
Hier seht Ihr zwei Servomotoren
Den Servo Motor an den Raspberry Pi anschließen
Um das Programm welches im nächsten Kapitel beschrieben wird nutzen zu können muss der Servo wie folgt an den Raspberry Pi angeschlossen werden.
- GPIO 12: Dieser Pin erzeugt das PWM Signal für den ersten Servomotor. Hier wird das gelbe Kabel angeschlossen
- GPIO 18: Dieser Pin erzeugt das PWM Signal für den zweiten Servomotor. Hier wird das gelbe Kabel angeschlossen
- Das rote Kabel wird mit den +5V der externen Stromquelle verbunden.
- Das schwarze Kabel wird mit der Erdung (GND) der externen Stromquelle verbunden
- Bitte achte darauf, dass die Erdung der externen Stromquelle mit der Erdung des Raspberry Pi’s verbunden sein muss. Andernfalls kann es sein, dass der Servomotor sich nicht richtig bewegt.
[DE_BOOK_DETAIL DE_BOOK_DETAIL=”DE_BOOK_DETAIL”]
Servomotor – Python Programm
Ich habe ein kleines Programm in Python geschrieben um die beiden Servomotoren des Roboter-Autos steuern zu können. Es ist nur ein Beispiel welches erklärt wie Servomotoren gesteuert werden können und wie diese sich von links in die Mitte nach rechts und wieder zurück bewegen. Das Programm kann gerne entsprechend den individuellen Bedürfnissen angepasst werden.
Das Programm gibt es hier zum Download: servo motor python test program
Weiterführende Artikel – Servo Kontroller
Wer aber mehrer Servo Motoren mit einem Raspberry Pi steuern möchte und dies auch hoch präzise kommt um einen Servo Kontroller nicht herum. Ich stelle in den folgenden Artikeln von mir einem Servo Kontroller vor der kostengünstig ist und perfekt am Raspberry Pi funktioniert.
- 16-Kanal PCA9685 Servo Kontroller – Teil 1 Einführung und Aufbau
- 16-Kanal PCA9685 Servo Kontroller – Teil 2 Software Installation und Test
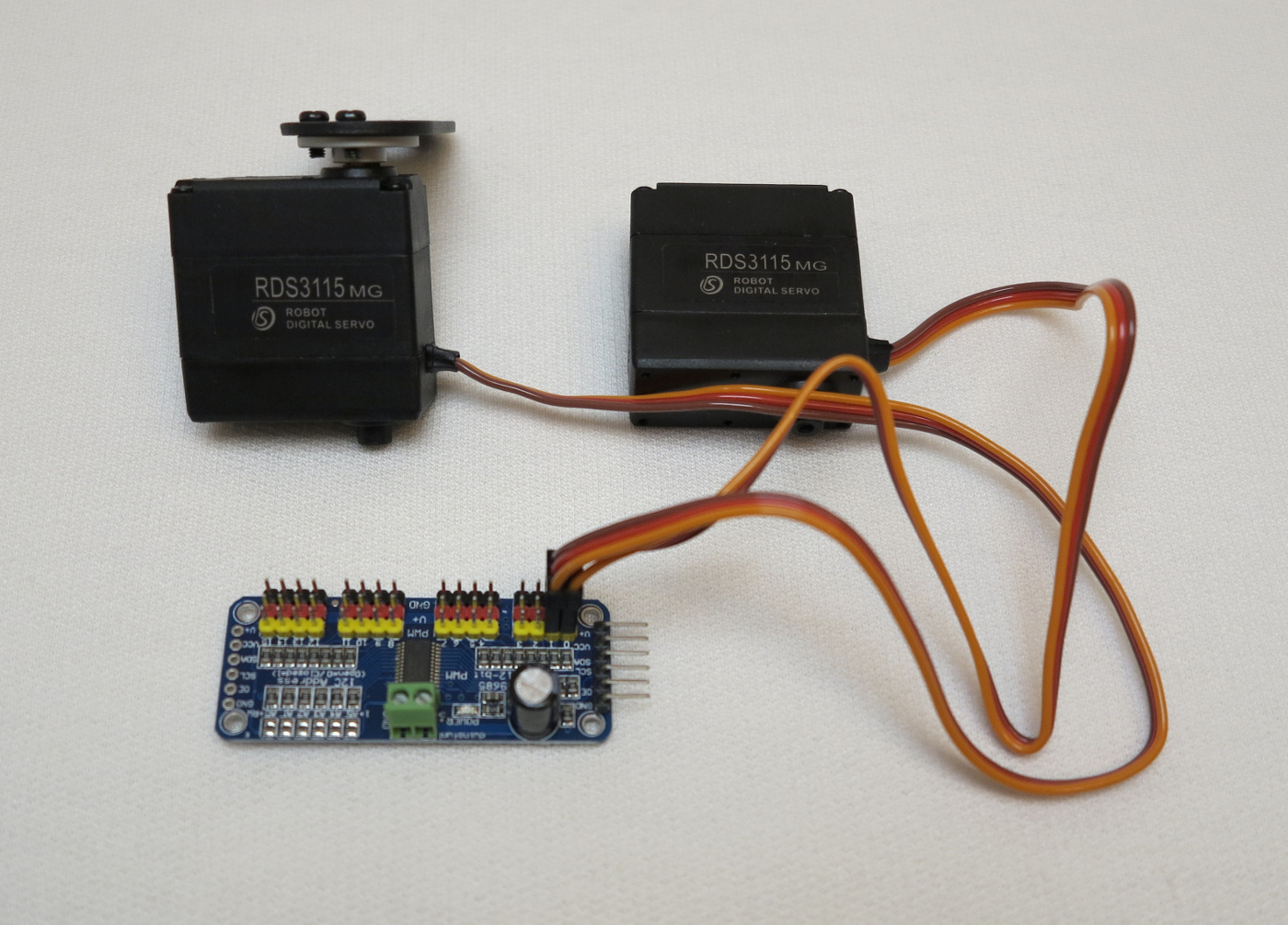
16 Kanal Servo Kontroller I2C Schnittstelle Servo Motoren
Video
Das Video zeigt mein aktuelles Roboter-Auto als Prototyp welches mit zwei Servomotoren und zwei Ultraschall Sensoren ausgestattet ist.








Recent Comments