

Ich habe mir Gedanken darüber gemacht welche Funktionen alle in den Roboter eingebaut werden sollen. Natürlich muss der Kinder Bot mit verschiedenen Komponenten ausgestattet werden wie Anzeigen und sich bewegenden Anbauten wie Arme. So ist eine Anzeige in Form eines Bildschirms wichtig um vielleicht Bilder, Videos oder gar Spiele darauf anzuzeigen. Auch Arme die sich bewegen sollte jeder Kinder Robi haben der etwas einem Menschen ähneln soll. Auch ist mir ein guter Sound wichtig daher habe ich richtige aktive Boxen verbaut. Mehr zu der Ausstattung die ich in meinen Roboter verbaut habe im nachfolgenden Abschnitt.
Raspberry Pi Touchscreen
Für das zentrale Display im Robi habe ich den offizielle Raspberry Pi Touchscreen gekauft. Dank dem Design und technischen Aufbau des original Raspberry Pi Touchscreen ist es sehr einfach möglich diesen am Raspberry Pi anzuschließen. Du musst Dir also keine Gedanken über eine Unterstützung durch das Betriebssystem Raspbian machen da alle Treiber schon vorhanden sind. Den Touchscreen selber habe ich durch ein passgenau geschnittenes Loch von außen in den Körper des Roboters eingebaut. Auf der Innenseite des Roboters habe ich das Display mit zwei Blechlochstreifen befestigt. So kann der Touchscreen nicht nach vorne heraus fallen. Das folgende Bild zeigt die Befestigung des Touchscreen mit den Blechlochstreifen vom Baumarkt sehr schön.

Kinder Roboter – Touchscreen Befestigung
Die Verkabelung des Touchscreen ist wiederum schnell gemacht. Dank der guten Anleitung und der Erklärung der einzelnen Schritte klappte die Verkabelung sehr gut. Alle Kabel die notwendig sind werden mitgeliefert bis auf das micro-USB Kabel. Der Strom für das Display kommt via micro-USB Kabel.
Hinweis Touchscreen:
Bei der Verkabelung gibt es zwischem Raspberry Pi 1 und dem Raspberry Pi 3 Model B einen wesentlichen Unterschied. Beim Raspberry Pi 1 müssen zwei Jumper Kabel für den I2C Bus angeschlossen werden. Beim Raspberry Pi 3 Model B sind die Leitungen für den I2C Bus schon im DSI Kabel mit integriert. So müssen hier nicht extra Jumper-Kabel angeschlossen werden. Wenn Ihr also ein Problem mit Adressen auf dem I2C Bus seht dann kann es hier an einer doppelten Verkabelung über die zwei Jumper Kabel und dem DSI Kabel liegen.
Das DSI Flachbandkabel wird einfach in den Tochscreen und den Raspberry Pi gesteckt in die entsprechenden Anschlüsse. Am den nachfolgenden Bild ist das weiße DSI Kabel rechts am Raspberry Pi zu sehen.
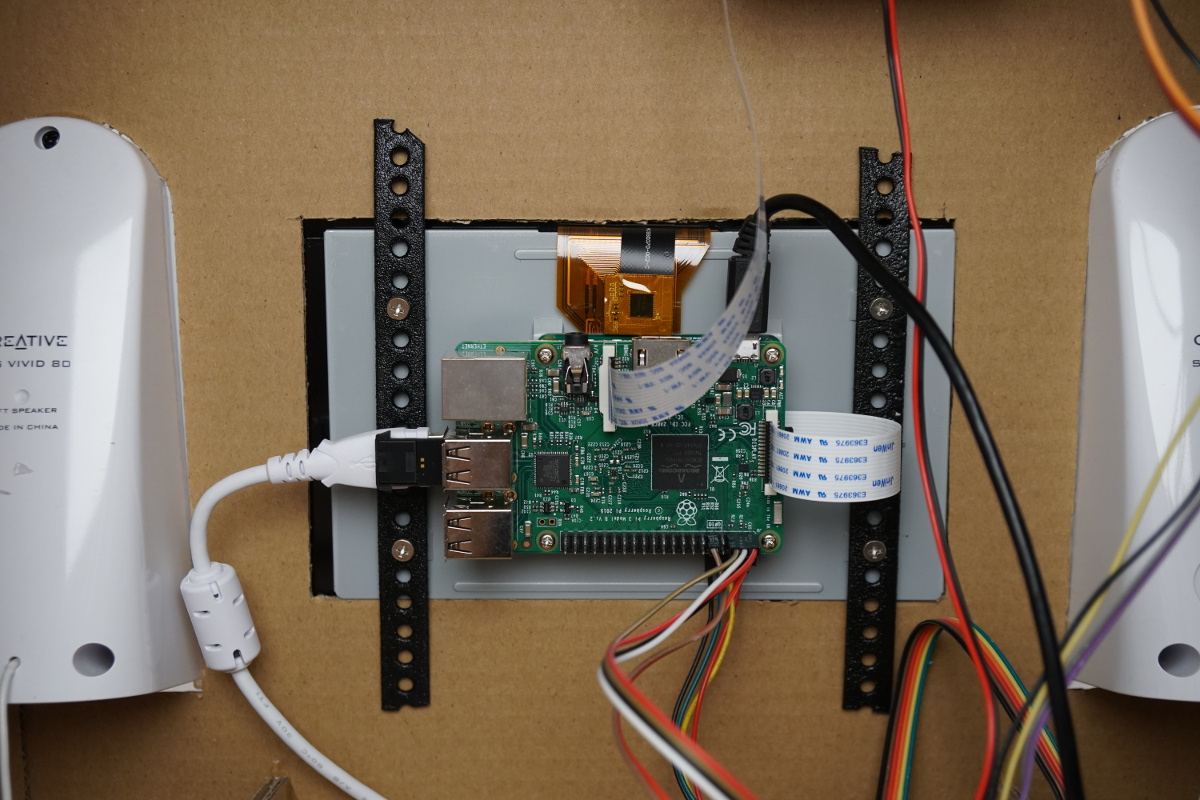
Kinder Roboter – Touchscreen Kabel
Nach der Verkabelung ist der Touchscreen fertig angeschlossen. Der Touchscreen versorgt den Raspberry Pi über die zwei Jumper-Kabel Vcc und GND mit Strom. Ich habe einfach das 5V Netzteil in die Steckdose gesteckt und schon startet auf dem Bildschirm Raspbian Jessie wenn dieses auf der micro-SD Karte schon installiert ist.
Hinweis Kinder Roboter:
Der Raspberry Pi Touchscreen benötigt ein sehr starkes 5V Netzteil. Ich habe mir eines zugelegt das 4 bis 5 Amper bei 5V liefert. Mit schwächeren Netzteilen kam es bei mir zu Problemen, dass ich z. B. immer die Anzeige angezeigt bekommen habe das die Stromversorgung zu schwach ist. Auch hatte ich ein ständiges Adressen springen auf dem I2C Bus, dass ich mit einem starken Netzteil dann nicht mehr hatte.
Display – Bild drehen um 180°
Für den Fall, dass das Bild auf dem Kopf steht muss man jetzt nicht das Touchdisplay um 180° drehen. Hier kann man via Software festlegen ob das Bild gedreht werden soll oder nicht. Dazu am besten via SSH am Raspberry Pi anmelden und mit dem Texteditor z. B. „nano“ die Datei „/boot/config.txt“ öffnen.
Befehl: sudo nano /boot/config.txt
Jetzt musst Du nach der Zeile „“ suchen bzw. wenn diese nicht vorhanden ist in die config.txt Datei einfügen.
display_rotate=1
oder
display_rotate=3
Jetzt sollte sich die Anzeige auf dem Display entsprechend gedreht haben. Hier musst Du einfach die für Dich passende Rotation auswählen.
Touchscreen – virtuelles Keyboard
In den ersten Minuten ärgerte ich mich darüber, dass ich für einfache Befehle kein Keyboard am Raspberry Pi im Roboter angeschlossen hatte. So habe ich nach einer virtuellen Tastatur gesucht aber diese nicht gefunden. Schlussendlich habe ich zwei virtuelle Tastaturen unter Raspbian nachinstalliert. Es waren die beiden virtuellen Tastaturen „Florence“ und „Matchbox“.
Am besten installierst Du nur eines der Programme. Im Internet schaue Dir dazu ein paar Bilder und Kommentare an um die für Dich richtige Wahl treffen zu können.
Jetzt folgen die Befehle um die beiden Programme zu installieren.
Befehl: sudo apt-get install florence
Befehl: sudo apt-get install matchbox-keyboard
Teil 2
Der Teil 2 der folgt beschäftigt sich überwiegend mit dem Thema Sound.
Artikelübersicht - Kinder Roboter:
Raspberry Pi Kinder Roboter - EinführungRaspberry Pi Kinder Roboter – Körper
Raspberry Pi Kinder Roboter - Teil 1 Roboter - Arme
Raspberry Pi Kinder Roboter - Teil 2 Roboter - Arme
Raspberry Pi Kinder Roboter – Teil 1 Kopf
Raspberry Pi Kinder Roboter – Teil 2 Kopf
Raspberry Pi Kinder Roboter – Teil 1 Ausstattung
Raspberry Pi Kinder Roboter – Teil 2 Ausstattung
Raspberry Pi Kinder Roboter - Steuereinheit Teil 1
Raspberry Pi Kinder Roboter – Steuereinheit Teil 2
Raspberry Pi Kinder Roboter – Steuereinheit Teil 3 Joystick
Raspberry Pi Kinder Roboter – Gestaltung des Körpers







Recent Comments