


The Discoverer is a remote controlled robot based on a Raspberry Pi computer. The special feature is that it is equipped with a metal detector. It is currently the largest robot car I have built. In addition to the metal detector, its other equipment includes a pivoting camera and a Raspberry Pi Sense-HAT with magnetometer and other sensors. I designed this robot as a prototype to test the GPS receiver in combination with a compass module which is built into the Raspberry Pi Sense-HAT. Because there are no finished robot kits in this size I started to build a chassis myself. I learned a lot about the electronics and the chassis while building the robot. The installed wheels are currently still too small to drive on unpaved roads. The following picture shows the parking lot of the university around the corner. As you can see on the picture the wheels are very small and driving on the rough gravel is not easy for the robot car.
But still I was able to steer the remote-controlled Discoverer over a distance of 350 meters. Driving around was really fun and the metal detector also found some screws and cables. So far, everything had worked out and thus proved the function of the robot car. Hopefully in the future I will find a treasure with which I can finance my hobby of building robots 😉

Discoverer with gps antenna
Equipment for remote controlled robots
- GPS support for waypoint tracking
- Metal detector for finding, for example, a treasure
- Remote control via a W-LAN connection
- Built-in W-LAN access point
- Live Video Stream
- Web interface for the control
Component Overview
If you are thinking about building your own robot-car I created an overview of the components I typically use in my robots.
The component list is available here: component list
GPS support for autonomous driving
With the NAVILOCK GPS NL-602U USB GPS antenna the robot is able to determine its position in open terrain. In combination with the Raspberry Pi Sense-HAT, the robot car can also determine which direction it is facing without having to drive around to calculate the orientation with the GPS coordinates over the course angle. The setup of the GPS antenna was very easy as the module is directly supported by Linux / Raspbian.
GPS software – for the control of the self-propelled robot car
I have developed the software with which I can control my Discoverer via GPS. The main program gps-drive-robo-car.py is developed in Python. It imports three more modules to control e.g. the motor driver l298N, the LED matrix of the Raspberry Pi Sense-HAT and a module to calculate the north direction.
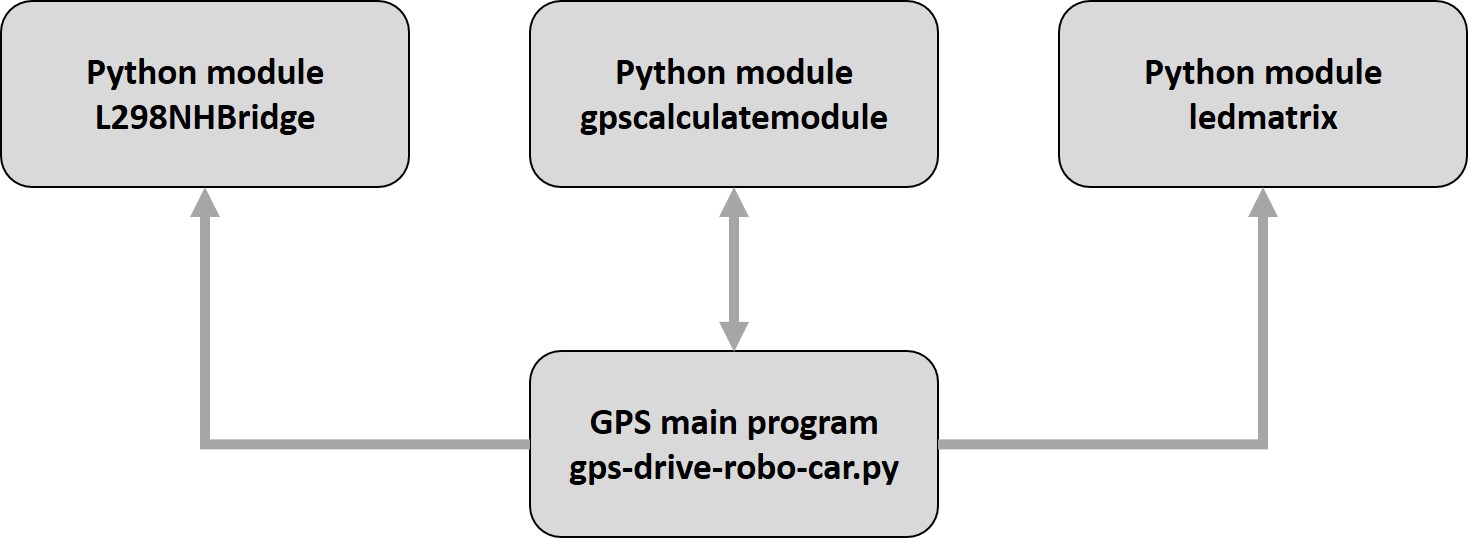
self-driving robot program overview
With the magnetometer and gyroscope of the Raspberry Pi Sense-HAT, the robot car is able to control the orientation of the front in which the Discoverer is looking. So it is possible to approach waypoints directly.
Software – Autonomous moving robot:
All programs for the autonomous driving robot are available for download under the following link: download page
Raspberry Pi Sense-HAT
Configuring the Raspberry Pi Sense-HAT was not that easy, but once you get over this hurdle it works very reliably. I now have two sense HATs in my robot cars and I am very satisfied. I have connected these to the Raspberry Pi via appropriate jumper cables. All GPIO pins of the Raspberry Pi are still available for further electronic components such as the engine driver.
I have written a Python program with which the Discoverer GPS can scan points and simultaneously search for treasure with the metal detector. So I have imagined the treasure hunt that I only have to look at the log file to which GPS coordinates the metal detector has hit.

Raspberry Pi self-driving car
Pan&Tilt camera kit
The video shows the first test run of the remote controlled robot car Discoverer. This was very bumpy and the robot also lost a wheel. But the technology has worked so far and I am satisfied.
Discoverer Video
The video shows the first test run with active metal detector. The test run was very bumpy and the robot lost a wheel.

Differential GPS – The exact navigation aid
For all those who want to steer their model car or drone very precisely, differential GPS is the right choice. What this is and how differential GPS works I have described in the following blog post.
Precise GPS GNSS positioning with a Raspberry Pi and the RTKLIB – introduction






Greetings, this is excellent work. By chance do you have a list of components and maybe how you did some of the robot chassis work. Thanks.
Hi,
I am doing a similar project and am struggling with the metal detector bit and the programming. Can you please guide me through this. TIA
Sell it to the army or some NGOs in africa to detect IODs.
Hi,
Excellent project! I have bought a sense hat, but at the moment I am not doing anything as ambitious as your project. I just want to check the temperature, humidity and pressure. Unfortunately, the Sense Hat mounted on the Raspberry Pi gives wrong temerature as the sensor picks up the heat from the Pi’s CPU.
Would it be possible for you to give a diagram of how to connect the Sense Hat to the Pi with a breadboard and jumper wires?
Thanks in advance
Hello Mukherjee,
to connect the Sense HAT via Jumper wires you need the following connections:
I2C Bus
3.3 V
5 V
GND
ID_SD
ID_SC
I hope this will help you.
Best Regards,
Maker
Hi,
Thanks a million!! I was missing the the 3.3 V connection.
So just connecting ID_SD and ID_SC can let me access all the sensors on the Sense Hat? The other GPIO pins are not required?
Thanks in advance,
Sudeep
Hi Mukherjee,
you have to connect at all seven jumper-wires. Ths I2C bus has two wires. One for the clock (SCL) and one for the data (SDA)
– SDA
– SCL
– 3.3 V
– 5 V
– GND
– ID_SD
– ID_SC
Best Regards,
Ingmar
Hi Ingmar,
Thanks a million.
Warm Regards,
Sudeep
Hello Sir, very awesome project. I am a student and select this project to do. But i don’t understand one thing, which is: how metal detector connected with Raspberry pi? Second, Does metal detector send any notification/value to raspberry pi (when metal detected) as other sensors do?
Please sir, i need you help.
Hello Farooq,
I am using a LM393 photoresistance photosensitive sensor module connected to the LED of the metal detector.
Thats easy to implement and you do not need an level shifter.
Best Regards,
Ingmar
Second, you list every component you used except metal detector
which is the most valuable component in this project. Why?
Hi Farooq,
the metal detector is self made by a maker from Canada. He is no longer selling this metal detector.
Best Regards,
Ingmar