


Mit dem ZeroBorg Motor Treiber können bis zu vier Motoren unabhängig voneinander gesteert werden. Das Board wird einfach auf die 40 Pin Leiste des Raspberry Pi ZERO oder z. B. einem Raspberry Pi 3 Modell B gesteckt. Die individuelle Ansteuerung von vier Motoren ermögicht es z. B. einem Roboter mit Mecanum rädern in jede beliebige Richtung zu fahren. Ich habe schon vier Mecanum Räder gekauft und jetzt muss ich noch meinen Roboter bauen. Die Idee ist einen Roboter zu bauen, mit dem ich ein 3D Modell meiner Wohnung erstellen kann. Der Roboter kann dann vorwärts, rückwärts fahren, lenken wie ein Panzer und seitwärts fahren wie eine Krabbe. Das wird super cool aber ist noch sehr viel Arbeit bis zum fertigen Roboter-Auto mit 3D Scanner.
Das folgende Bild zeigt den ZeroBorg Motortreiber.

ZeroBorg motor controller – robot-car
Seine kleinen Abmessungen ermöglichen es dem ZeroBorg perfekt unter einen Raspberry Pi zu passen. Ich habe den neuesten Raspberry Pi Zero mit einem CSI Anschluss und einer Raspberry Pi Kamera. Der Raspberry Pi ZERO zusammen mit dem kleinen Motortreiber eröffnen unzählige Möglichkeiten von kleinen Schreibtisch Robotern, Booten….
So wurde der ZeroBorg geliefert schön verpackt in kleine Tüten.
ZeroBorg motor controller – package
Ich hatte die KickStarter Kampagne unterstützt und jetzt habe ich meinen eigenen ZeroBorg erhalten. Sie finden die Kampagnen Homepage auf KickSstarter unter der folgenden URL: ZeroBorg – Robotics for the Raspberry Pi Zero Den Motortreiber gibt es jetzt auch offiziell zu kaufen. Der Motortreiber besticht durch die Möglichkeit über den I2C Bus mehrere Motortreiber zusammen zu schließen und so eine unmenge an Motoren steuern zu können. So können ganz interessante Lösungen entwickelt werden.
[DE_BOOK_DETAIL DE_BOOK_DETAIL=”DE_BOOK_DETAIL”]
Ich habe alles ausgepackt und das Board und alle anderen Teile sehen sehr gut verlötet aus und schön aufgebaut. Hoffentlich habe ich in den nächsten Monaten die Zeit mit meinem Projekt zu starten.
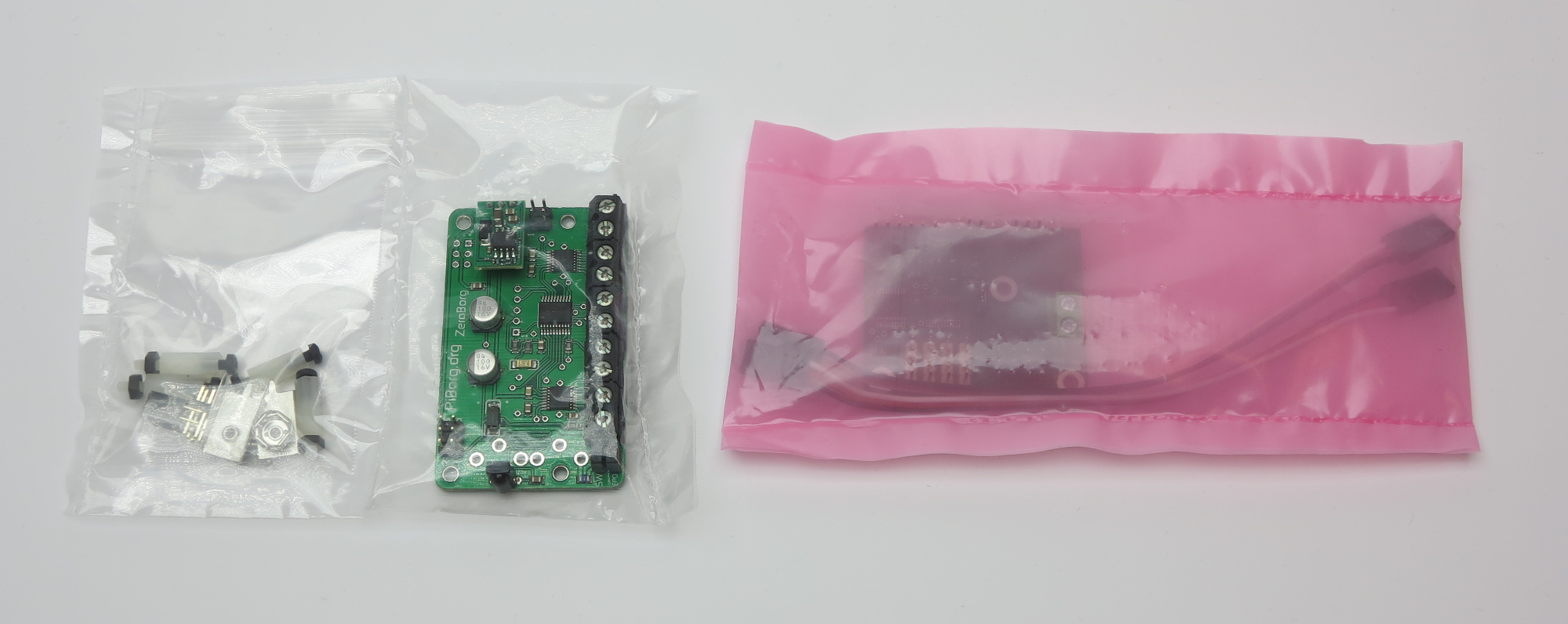
Aus gepackt sehen alle Teile wie auf dem folgenden Bild gezeigt aus.

ZeroBorg motor controller – unpacking
Die folgende Auswahl zeigt den ZeroBorg Motortreiber sowie die weiteren Basisteile aus denen ich mein Kamera Roboter-Auto bauen möchte. Die Motoren fehlen mir noch. Hier habe ich noch nicht die richtigen Getriebemotoren gefunden die stark genug sind für die Mecanum Räder aber auch nicht zu groß. Bei der Kamera bin ich mir auch noch nicht sicher welche Lösung hier die beste wäre um ein 3D Modell erstellen zu können. Eventuell wird es doch eher eine Lösung mit einem LIDAR System.
Raspberry Pi Roboter-Auto Komponentenliste
Wenn ich jetzt das Interesse wecken konnte am Bau eines Roboters zusammen mit einem Raspberry Pi der findet auf meinem Blog eine Komponentenliste. Diese Komponentenliste listet die elektronischen Komponenten oder fertigen Raspberry Pi Bausätze auf die ich selber mit gutem Gewissen weiterempfehlen kann. Die meisten aufgezählten Komponenten kommen in meinen Modellen zum Einsatz und wurden so durch mich auf Funktion und Kompatibilität mit dem Raspberry Pi hin geprüft.
Hier der Link auf die Komponentenliste: Komponentenliste

ZeroBorg motor controller - robot-car components







Recent Comments