

SunFounder Roboter Bausatz – Smart Video Car Verkabelung
Ich habe die Verkabelung des Roboter Autos anhand der beiliegenden Anleitung aus dem Kit von...
Weiterlesen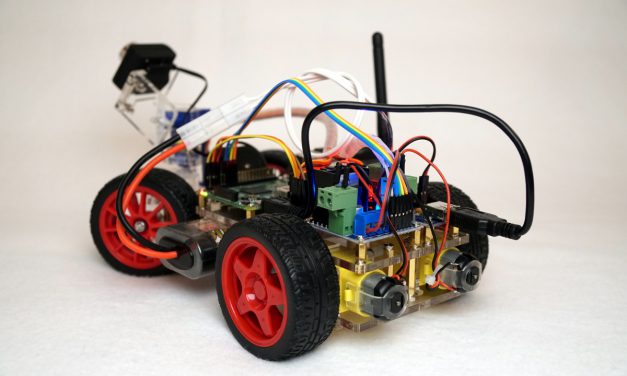
Ich habe die Verkabelung des Roboter Autos anhand der beiliegenden Anleitung aus dem Kit von...
Weiterlesen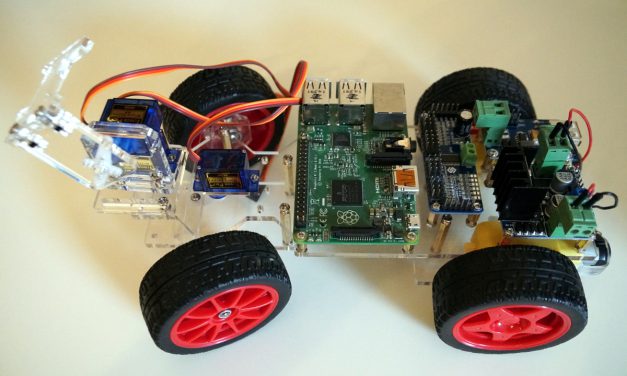
Ich habe bei dem Zusammenbau des Roboter Autos mit der deutschen Bauanleitung losgelegt. Diese...
Weiterlesen
Ich wurde in der Vergangenheit immer wieder von Lesern meines Buches sowie von Lehrern...
Weiterlesen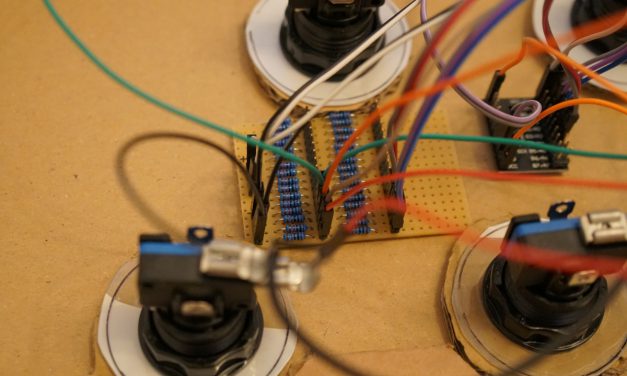
In diesem Beitrag geht es um die Verkabelung der fünf Arcade-Knöpfe die ich am Spielzeug Roboter...
Weiterlesen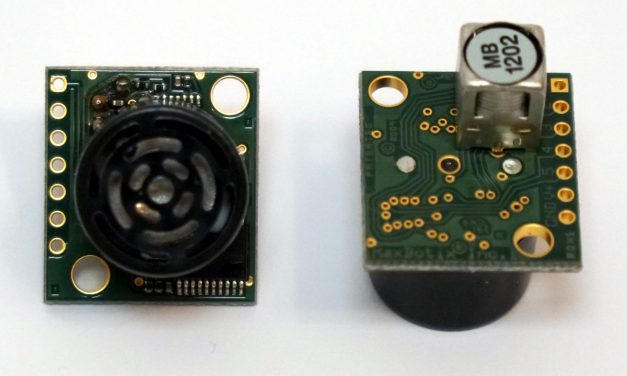
Ich habe zwei MaxBotix I2CXL MaxSonar EZ Ultraschall Sensoren für meinen Roboter gekauft. Ich habe...
WeiterlesenRoboter-Autos mit dem Raspberry Pi

Recent Comments