
Präzise GPS-Positionierung mit dem Raspberry Pi Computer und RTKLIB – XBee serielle Datenübertragung
Mit den XBee Modulen können verschiedene Netzwerkarchitekturen aufgesetzt werden. Ich verwende nur...
Weiterlesen
Mit den XBee Modulen können verschiedene Netzwerkarchitekturen aufgesetzt werden. Ich verwende nur...
Weiterlesen
In diesem Artikel geht es darum zu zeigen wie prinzipiell eine genaue GPS-Positionierung erfolgen...
Weiterlesen
Nach dem die Basisstation aufgebaut ist und diese die GPS Daten überträgt folgt jetzt der Aufbau...
Weiterlesen
Nach dem Sie die Software für das RasPiGNSS Modul im vorherigen Artikel auf Ihrem Raspberry Pi...
Weiterlesen
In diesem Beitrag geht es darum welche Software installiert werden muss um die RasPiGNSS...
Weiterlesen
Die Basisstation und das Roboter-Auto müssen über Funk miteinander verbunden werden. Nur so kann...
Weiterlesen
Für den Aufbau meiner differential GPS Lösung mit zwei RasPiGNSS “Aldebaran” Modulen werden...
Weiterlesen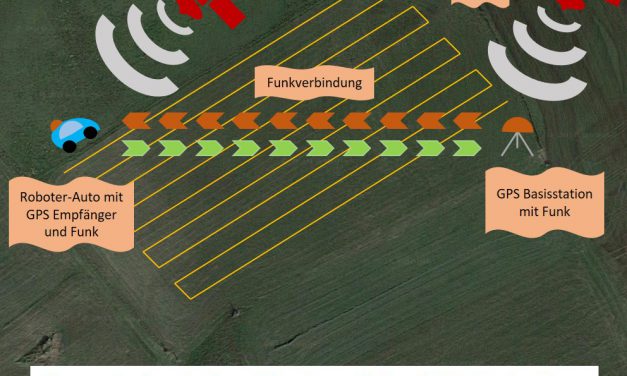
In diesem Beitrag stelle ich die Theorie vor wie der Aufbau für eine präzise GNSS Positionierung...
Weiterlesen
Roboter-Autos mit dem Raspberry Pi

Recent Comments